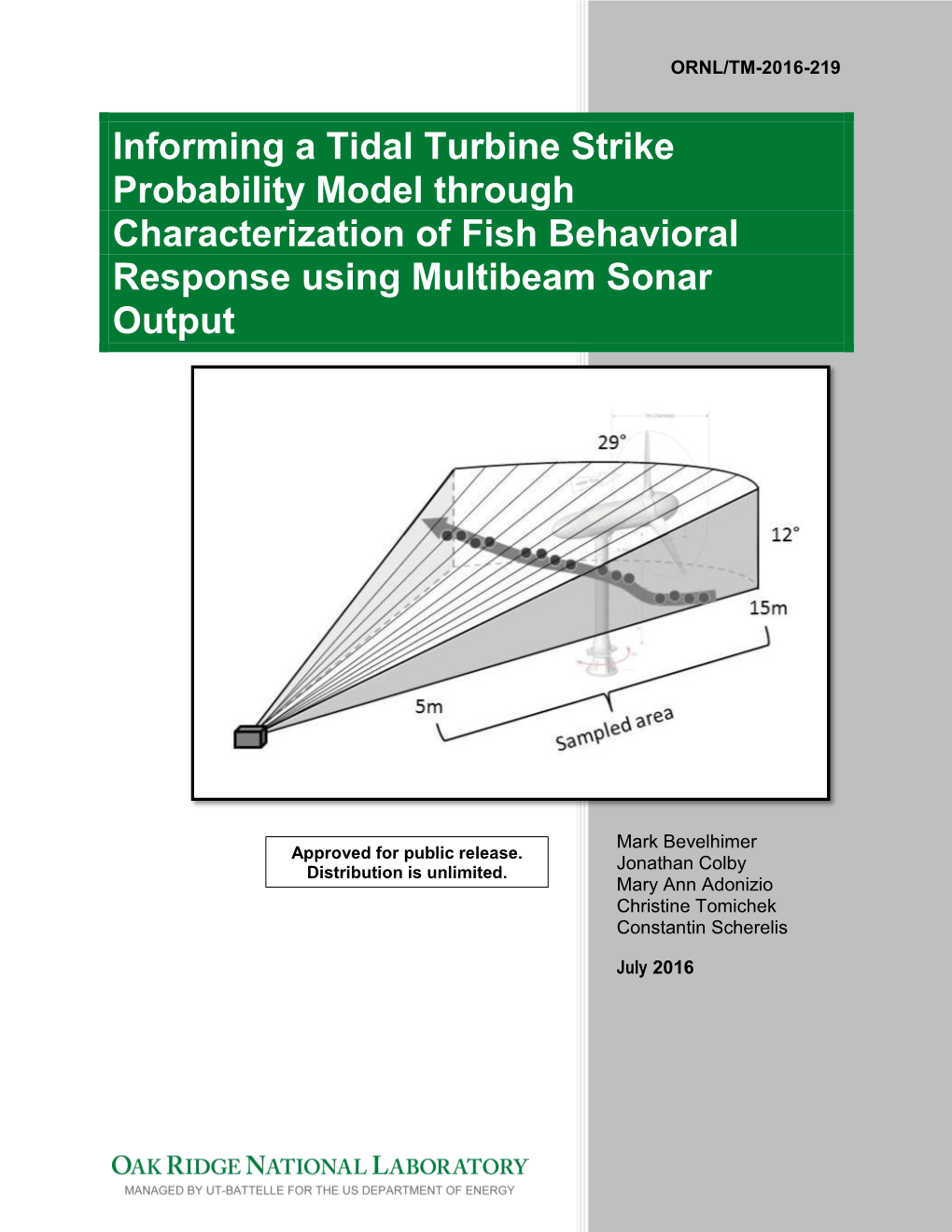
Informing a Tidal Turbine Strike Probability Model Through Characterization of Fish Behavioral Response Using Multibeam Sonar Output
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Winds, Waves, and Bubbles at the Air-Sea Boundary
JEFFREY L. HANSON WINDS, WAVES, AND BUBBLES AT THE AIR-SEA BOUNDARY Subsurface bubbles are now recognized as a dominant acoustic scattering and reverberation mechanism in the upper ocean. A better understanding of the complex mechanisms responsible for subsurface bubbles should lead to an improved prediction capability for underwater sonar. The Applied Physics Laboratory recently conducted a unique experiment to investigate which air-sea descriptors are most important for subsurface bubbles and acoustic scatter. Initial analyses indicate that wind-history variables provide better predictors of subsurface bubble-cloud development than do wave-breaking estimates. The results suggest that a close coupling exists between the wind field and the upper-ocean mixing processes, such as Langmuir circulation, that distribute and organize the bubble populations. INTRODUCTION A multiyear series of experiments, conducted under the that, in the Gulf of Alaska wintertime environment, the auspices of the Navy-sponsored acoustic program, Crit amount of wave-breaking activity may not be an ideal ical Sea Test (CST), I has been under way since 1986 with indicator of deep bubble-cloud formation. Instead, the the charter to investigate environmental, scientific, and penetration of bubbles is more closely tied to short-term technical issues related to the performance of low-fre wind fluctuations, suggesting a close coupling between quency (100-1000 Hz) active acoustics. One key aspect the wind field and upper-ocean mixing processes that of CST is the investigation of acoustic backscatter and distribute and organize the bubble populations within the reverberation from upper-ocean features such as surface mixed layer. waves and bubble clouds. -

Wetsuits Raises the Bar Once Again, in Both Design and Technological Advances
Orca evokes the instinct and prowess of the powerful ruler of the seas. Like the Orca whale, our designs have always been organic, streamlined and in tune with nature. Our latest 2016 collection of wetsuits raises the bar once again, in both design and technological advances. With never before seen 0.88Free technology used on the Alpha, and the ultimate swim assistance WETSUITS provided by the Predator, to a more gender specific 3.8 to suit male and female needs, down to the latest evolution of the ever popular S-series entry-level wetsuit, Orca once again has something to suit every triathlete’s needs when it comes to the swim. 10 11 TRIATHLON Orca know triathletes and we’ve been helping them to conquer the WETSUITS seven seas now for more than twenty years.Our latest collection of wetsuits reflects this legacy of knowledge and offers something for RANGE every level and style of swimmer. Whether you’re a good swimmer looking for ultimate flexibility, a struggling swimmer who needs all the buoyancy they can get, or a weekend warrior just starting out, Orca has you covered. OPENWATER Swimming in the openwater is something that has always drawn those types of swimmers that find that the largest pool is too small for them. However open water swimming is not without it’s own challenges and Orca’s Openwater collection is designed to offer visibility, and so security, to those who want to take on this sport. 016 SWIMRUN The SwimRun endurance race is a growing sport and the wetsuit requirements for these competitors are unique. -

Informing a Tidal Turbine Strike Probability Model Through Characterization of Fish Behavioral Response Using Multibeam Sonar Output
ORNL/TM-2016-219 Informing a Tidal Turbine Strike Probability Model through Characterization of Fish Behavioral Response using Multibeam Sonar Output Mark Bevelhimer Approved for public release. Jonathan Colby Distribution is unlimited. Mary Ann Adonizio Christine Tomichek Constantin Scherelis July 2016 DOCUMENT AVAILABILITY Reports produced after January 1, 1996, are generally available free via US Department of Energy (DOE) SciTech Connect. Website http://www.osti.gov/scitech/ Reports produced before January 1, 1996, may be purchased by members of the public from the following source: National Technical Information Service 5285 Port Royal Road Springfield, VA 22161 Telephone 703-605-6000 (1-800-553-6847) TDD 703-487-4639 Fax 703-605-6900 E-mail [email protected] Website http://www.ntis.gov/help/ordermethods.aspx Reports are available to DOE employees, DOE contractors, Energy Technology Data Exchange representatives, and International Nuclear Information System representatives from the following source: Office of Scientific and Technical Information PO Box 62 Oak Ridge, TN 37831 Telephone 865-576-8401 Fax 865-576-5728 E-mail [email protected] Website http://www.osti.gov/contact.html This report was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise, does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof. -

Fusion System Components
A Step Change in Military Autonomous Technology Introduction Commercial vs Military AUV operations Typical Military Operation (Man-Portable Class) Fusion System Components User Interface (HMI) Modes of Operation Typical Commercial vs Military AUV (UUV) operations (generalisation) Military Commercial • Intelligence gathering, area survey, reconnaissance, battlespace preparation • Long distance eg pipeline routes, pipeline surveys • Mine countermeasures (MCM), ASW, threat / UXO location and identification • Large areas eg seabed surveys / bathy • Less data, desire for in-mission target recognition and mission adjustment • Large amount of data collected for post-mission analysis • Desire for “hover” ability but often use COTS AUV or adaptations for specific • Predominantly torpedo shaped, require motion to manoeuvre tasks, including hull inspection, payload deployment, sacrificial vehicle • Errors or delays cost money • Errors or delays increase risk • Typical categories: man-portable, lightweight, heavy weight & large vehicle Image courtesy of Subsea Engineering Associates Typical Current Military Operation (Man-Portable Class) Assets Equipment Cost • Survey areas of interest using AUV & identify targets of interest: AUV & Operating Team USD 250k to USD millions • Deploy ROV to perform detailed survey of identified targets: ROV & Operating Team USD 200k to USD 450k • Deploy divers to deal with targets: Dive Team with Nav Aids & USD 25k – USD 100ks Diver Propulsion --------------------------------------------------------------------------------- -
Low-Frequency Active Towed Sonar
LOW-FREQUENCY ACTIVE TOWED SONAR Full-feature, long-range, low-frequency active and passive variable depth sonar (VDS) The Low-Frequency Active Sonar (LFATS) system is used on ships to detect, track and engage all types of submarines. L3Harris specifically designed the system to perform at a lower operating frequency against modern diesel-electric submarine threats. FEATURES > Compact size - LFATS is a small, > Full 360° coverage - a dual parallel array lightweight, air-transportable, ruggedized configuration and advanced signal system processing achieve instantaneous, > Specifically designed for easy unambiguous left/right target installation on small vessels. discrimination. > Configurable - LFATS can operate in a > Space-saving transmitter tow-body stand-alone configuration or be easily configuration - innovative technology integrated into the ship’s combat system. achieves omnidirectional, large aperture acoustic performance in a compact, > Tactical bistatic and multistatic capability sleek tow-body assembly. - a robust infrastructure permits interoperability with the HELRAS > Reverberation suppression - the unique helicopter dipping sonar and all key transmitter design enables forward, aft, sonobuoys. port and starboard directional LFATS has been successfully deployed on transmission. This capability diverts ships as small as 100 tons. > Highly maneuverable - own-ship noise energy concentration away from reduction processing algorithms, coupled shorelines and landmasses, minimizing with compact twin-line receivers, enable reverb and optimizing target detection. short-scope towing for efficient maneuvering, fast deployment and > Sonar performance prediction - a unencumbered operation in shallow key ingredient to mission planning, water. LFATS computes and displays system detection capability based on modeled > Compact Winch and Handling System or measured environmental data. - an ultrastable structure assures safe, reliable operation in heavy seas and permits manual or console-controlled deployment, retrieval and depth- keeping. -
Sonar for Environmental Monitoring of Marine Renewable Energy Technologies
Sonar for environmental monitoring of marine renewable energy technologies FRANCISCO GEMO ALBINO FRANCISCO UURIE 350-16L ISSN 0349-8352 Division of Electricity Department of Engineering Sciences Licentiate Thesis Uppsala, 2016 Abstract Human exploration of the world oceans is ever increasing as conventional in- dustries grow and new industries emerge. A new emerging and fast-growing industry is the marine renewable energy. The last decades have been charac- terized by an accentuated development rate of technologies that can convert the energy contained in stream flows, waves, wind and tides. This growth ben- efits from the fact that society has become notably aware of the well-being of the environment we all live in. This brings a human desire to implement tech- nologies which cope better with the natural environment. Yet, this environ- mental awareness may also pose difficulties in approving new renewable en- ergy projects such as offshore wind, wave and tidal energy farms. Lessons that have been learned is that lack of consistent environmental data can become an impasse when consenting permits for testing and deployments marine renew- able energy technologies. An example is the European Union in which a ma- jority of the member states requires rigorous environmental monitoring pro- grams to be in place when marine renewable energy technologies are commis- sioned and decommissioned. To satisfy such high demands and to simultane- ously boost the marine renewable sector, long-term environmental monitoring framework that gathers multi-variable data are needed to keep providing data to technology developers, operators as well as to the general public. Technol- ogies based on active acoustics might be the most advanced tools to monitor the subsea environment around marine manmade structures especially in murky and deep waters where divining and conventional technologies are both costly and risky. -
Doppler Sonar Current Indicator 8
DOPPLER SONAR CURRENT INDICATOR 8 Model High-performance current indicator displays accurate speed and current data at five depth layers on a 10.4" color TFT or virtually any VGA monitor utilizing a Black Box system www.furuno.com Obtain highly accurate water current measurements using FURUNO’s reliable acoustic technology. The FURUNO CI-68 is a Doppler Sonar Current The absolute movements of tide Indicator designed for various types of fish and measuring layers are displayed in colors. hydrographic survey vessels. The CI-68 displays tide speed and direction at five depth layers and ship’s speed on a high defi- nition 10.4” color LCD. Using this information, you can predict net shape and plan when to throw your net. Tide vector for Layer 1 The CI-68 has a triple-beam emission system for providing highly accurate current measurement. This system greatly reduces the effects of the Tide vector for Layer 2 rolling, pitching and heaving motions, providing a continuous display of tide information. When ground (bottom) reference is not available Tide vector for Layer 3 acoustically in deep water, the CI-68 can provide true tide current information by receiving position and speed data from a GPS navigator and head- ing data from the satellite (GPS) compass SC- 50/110 or gyrocompass. In addition, navigation Tide vector for Layer 4 information, including position, course and ship ’s track, can also be displayed The CI-68 consists of a display unit, processor Tide vector for Layer 5 unit and transducer. The control unit and display unit can be installed separately for flexible instal- lation. -

Transducers Recommended by Garmin
TRANSDUCER SELECTION 2021 GUIDE CHOOSING THE RIGHT TRANSDUCER PANOPTIX LIVESCOPE™ There are several types of sonar available, each with special capabilities. And each requires a different transducer to work most effectively. For optimum performance, it is very important to match the transducer to your device’s sonar. To start, make sure the transducer you are buying pairs with your unit, and determine what type of sonar technology you would like to add. Read through each section to learn more about the sonar technologies and transducers recommended by Garmin. Our award-winning Panoptix LiveScope sonar brings real-time scanning sonar to life. It shows highly detailed, easy-to-interpret live scanning sonar images of structure, bait and fish swimming below and around your boat in real time, even when your boat SONAR TECHNOLOGY // PAGE 3 ADDITIONAL TRANSDUCERS // PAGE 24 is stationary. • Panoptix Livescope™ • Transom Mount Full capabilities are available with the Panoptix LiveScope • Panoptix Livescope™ Perspective • Thru-hull Traditional System (see below). The Panoptix LiveScope™ LVS12 transducer ® Mode Mount provides an economical solution for your GPSMAP 8600xsv • Thru-hull CHIRP Traditional chartplotter — without the need for a black box -- with 30-degree • Panoptix™ All-seeing Sonar • In-hull 2018 forward and 30-degree down real-time scanning sonar views. • Scanning Sonar System: UHD • Pocket Mount Part no: 010-02143-00 LVS12 • Scanning Sonar System: CHIRP Sonar THREE MODES IN ONE TRANSDUCER ACCESSORIES AND SENSORS // PAGE 32 THE RIGHT MOUNTING // PAGE 10 PANOPTIX LIVESCOPE™ DOWN • Accessories • In-hull Mount • Smart Sensors • Kayak In-hull • NMEA 2000® • Trolling Motor Mount • Transom Mount • Thru-hull Mount Live, easy-to-interpret scanning sonar images of structure and swimming fish in incredible detail below your Panoptix LiveScope LVS12 Down GARMIN TRANSDUCERS // PAGE 12 boat — up to 200’. -

New York's Leadership in the Emerging Marine Renewable
New York’s Leadership in the Emerging Marine Renewable Energy Industry Ron Smith Verdant Power Inc. A new renewable energy industry, marine energy, including tidal and river energy systems, wave energy and ocean thermal energy systems is emerging around the world. Samples of recent headlines from the United Kingdom (UK) periodical “tidal today” include Scotland’s “Pentland Firth marine energy scheme to see investment worth £5B”, and “The Bay of Fundy tides tipped to generate electricity by 2015”. In the 1980’s the New York Power Authority with the US Department of Energy funded the development of a Kinetic Hydropower System (KHPS) at the Applied Sciences Department of New York University (NYU). In 2000, Verdant Power was incorporated to commercialize kinetic hydropower systems, and selected the NYU system for commercial development, and later hired an NYU lead designer, Dean Corren, to head the technology development and commercialization . Since 2002, NYSERDA has awarded Verdant Power eight development awards totaling over $3M to commercialize the KHPS technology at the Roosevelt Island Tidal Energy (RITE) Project in New York City’s East River for potential application around the world. Starting in 2002, the RITE Project has led the development of this industry in North America with an initial installation of a field of six turbines in the spring of 2007 for operational and environmental assessment for an unprecedented technology capability. Verdant completed the Phase 2 demonstration phase of the project this year with significant and positive results. Earlier this year, Verdant Power received approval of its draft commercial license application from the US Federal Energy Regulatory Commission (FERC) for the world’s first commercial field of up to 30 turbines in the East River. -

Effects of Ocean Thermocline Variability on Noncoherent Underwater Acoustic Communications
Portland State University PDXScholar Electrical and Computer Engineering Faculty Electrical and Computer Engineering Publications and Presentations 4-2007 Effects of Ocean Thermocline Variability on Noncoherent Underwater Acoustic Communications Martin Siderius Portland State University, [email protected] Michael B. Porter HLS Research Corporation Paul Hursky HLS Research Corporation Vincent McDonald HLS Research Corporation Let us know how access to this document benefits ouy . Follow this and additional works at: http://pdxscholar.library.pdx.edu/ece_fac Part of the Electrical and Computer Engineering Commons Citation Details Siderius, M., Porter, M. B., Hursky, P., & McDonald, V. (2007). Effects of ocean thermocline variability on noncoherent underwater acoustic communications. Journal of The Acoustical Society of America, 121(4), 1895-1908. This Article is brought to you for free and open access. It has been accepted for inclusion in Electrical and Computer Engineering Faculty Publications and Presentations by an authorized administrator of PDXScholar. For more information, please contact [email protected]. Effects of ocean thermocline variability on noncoherent underwater acoustic communications ͒ Martin Siderius,a Michael B. Porter, Paul Hursky, Vincent McDonald, and the KauaiEx Group HLS Research Corporation, 12730 High Bluff Drive, San Diego, California 92130 ͑Received 16 December 2005; revised 14 December 2006; accepted 30 December 2006͒ The performance of acoustic modems in the ocean is strongly affected by the ocean environment. A storm can drive up the ambient noise levels, eliminate a thermocline by wind mixing, and whip up violent waves and thereby break up the acoustic mirror formed by the ocean surface. The combined effects of these and other processes on modem performance are not well understood. -

Table Is Set for ICC's Irish Festival
June 2013 Boston’s hometown VOL. 24 #6 journal of Irish culture. $1.50 Worldwide at All contents copyright © 2013 Boston Neighborhood News, Inc. bostonirish.com Atlantic Steps, which takes the stage on the final day of the Boston Irish Festival, showcases the story of Irish dance. Table is set for ICC’s Irish Festival By Sean Smith competitions, an Irish bread An Coimisiun, North American its sometimes gritty, sometimes among the cast of Atlantic Special to the BiR baking contest, children and Feis Commission and NAFC saucy, sometimes angry, always Steps, an international-touring Performances by Eileen Ivers family amusements, genealogy New England Region President loud’n proud version of Irish adaptation by Brian Cunning- & Immigrant Soul, Black 47, consultations, and appearances Pat Watkins. rock, flavored with folk as well ham of the Irish show “Fuaim and Atlantic Steps highlight by authors of books related to Kicking off the festival on as reggae, jazz, and hip-hop to Chonamara,” which chronicles this year’s Boston Irish Festival, Irish and Irish-American his- Friday evening, June 7, at 8 create an unabashed working- the story of sean-nos, Ireland’s which will take place June 7-9 tory, culture and literature. o’clock, will be Grammy win- class urban sound. Fronted by oldest dance form, portrayed at the Irish Cultural Centre of This year also will see the ner and nine-time all-Ireland lead singer, writer and guid- through the music, song, dance, New England in Canton. inaugural Boston Irish Festival fiddle champion Eileen Ivers, ing spirit Larry Kirwan, their and energy of the Connemara The traditional fiddle-accordi- Feis, a partnership with Liam whose resume includes appear- songs explore the social and region. -

Diver Detection Sonar System
Diver Detection Sonar System Product Code: 5510-01 Key Features Track & classify Single or multi-head networked systems Low false alarm rate Integration 3rd party security systems Fixed, temporary or expeditionary deployment Easy to use Overview The Diver Detection Sonar System is a single or multi-head active sonar Features system designed to automatically detect and track underwater and surface threats, principally divers, scuba or closed circuit, with or Identifies & classifies targets without propulsion aids, surface swimmers and unmanned underwater vehicles. Single or multi-head systems It will identify targets at ranges of up to 1,200 metres, depending on environmental conditions and product variant. 900 metres range for divers. Low power consumption 70 watts per sonar head It is small and lightweight so is quick to deploy from a boat, install in a port or fix along a coastline - providing you with an instant underwater security shield. Low false alarm rate Easy to use, security personnel do not need to be sonar experts to use it Maximum depth rating 50 metres once it is set up, it can be left to run autonomously. Can be Integrated with other It can be configured to meet the needs of commercial and infrastructure security systems facility protection projects as a standalone security sensor or integrated with third party C2 (Command and Control) security systems. It can be networked sonar, allowing entire waterfronts can be protected using a single operator station [email protected] | www.wg-plc.com | +44 1295 756300 1 Westminster Group Plc, Westminster House, Blacklocks Hill, Banbury, Oxfordshire, OX17 2BS, United Kingdom Diver Detection Sonar System Applications The practicality of the Diver Detection Sonar makes the system a realistic option for protecting a wide range of maritime assets: - Expeditionary - Warfare units in overseas ports are widely recognised as the most visible and vulnerable of targets.