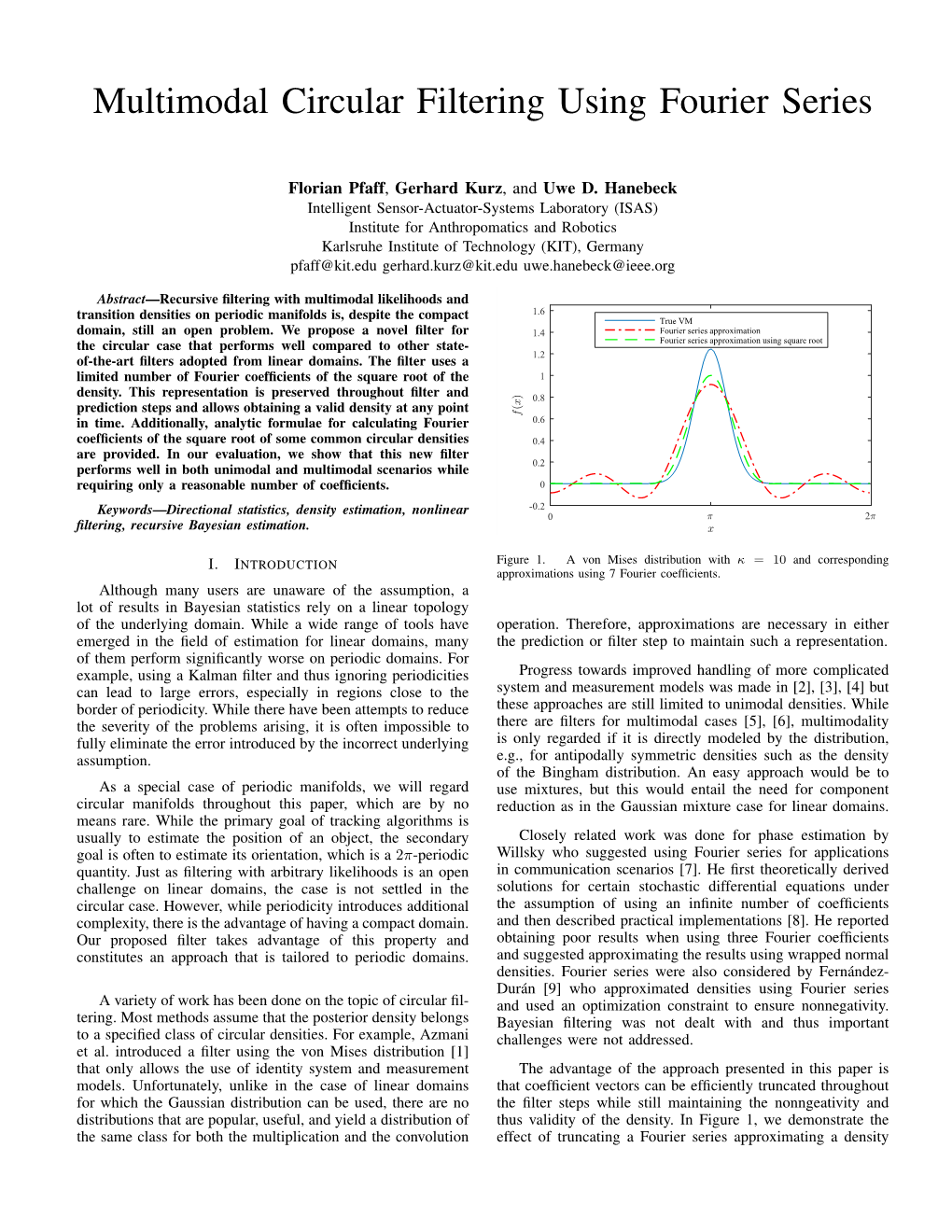
Multimodal Circular Filtering Using Fourier Series
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Convolution Theorem
Module 2 : Signals in Frequency Domain Lecture 18 : The Convolution Theorem Objectives In this lecture you will learn the following We shall prove the most important theorem regarding the Fourier Transform- the Convolution Theorem We are going to learn about filters. Proof of 'the Convolution theorem for the Fourier Transform'. The Dual version of the Convolution Theorem Parseval's theorem The Convolution Theorem We shall in this lecture prove the most important theorem regarding the Fourier Transform- the Convolution Theorem. It is this theorem that links the Fourier Transform to LSI systems, and opens up a wide range of applications for the Fourier Transform. We shall inspire its importance with an application example. Modulation Modulation refers to the process of embedding an information-bearing signal into a second carrier signal. Extracting the information- bearing signal is called demodulation. Modulation allows us to transmit information signals efficiently. It also makes possible the simultaneous transmission of more than one signal with overlapping spectra over the same channel. That is why we can have so many channels being broadcast on radio at the same time which would have been impossible without modulation There are several ways in which modulation is done. One technique is amplitude modulation or AM in which the information signal is used to modulate the amplitude of the carrier signal. Another important technique is frequency modulation or FM, in which the information signal is used to vary the frequency of the carrier signal. Let us consider a very simple example of AM. Consider the signal x(t) which has the spectrum X(f) as shown : Why such a spectrum ? Because it's the simplest possible multi-valued function. -

Lecture 7: Fourier Series and Complex Power Series 1 Fourier
Math 1d Instructor: Padraic Bartlett Lecture 7: Fourier Series and Complex Power Series Week 7 Caltech 2013 1 Fourier Series 1.1 Definitions and Motivation Definition 1.1. A Fourier series is a series of functions of the form 1 C X + (a sin(nx) + b cos(nx)) ; 2 n n n=1 where C; an; bn are some collection of real numbers. The first, immediate use of Fourier series is the following theorem, which tells us that they (in a sense) can approximate far more functions than power series can: Theorem 1.2. Suppose that f(x) is a real-valued function such that • f(x) is continuous with continuous derivative, except for at most finitely many points in [−π; π]. • f(x) is periodic with period 2π: i.e. f(x) = f(x ± 2π), for any x 2 R. C P1 Then there is a Fourier series 2 + n=1 (an sin(nx) + bn cos(nx)) such that 1 C X f(x) = + (a sin(nx) + b cos(nx)) : 2 n n n=1 In other words, where power series can only converge to functions that are continu- ous and infinitely differentiable everywhere the power series is defined, Fourier series can converge to far more functions! This makes them, in practice, a quite useful concept, as in science we'll often want to study functions that aren't always continuous, or infinitely differentiable. A very specific application of Fourier series is to sound and music! Specifically, re- call/observe that a musical note with frequency f is caused by the propogation of the lon- gitudinal wave sin(2πft) through some medium. -

Fourier Series
Academic Press Encyclopedia of Physical Science and Technology Fourier Series James S. Walker Department of Mathematics University of Wisconsin–Eau Claire Eau Claire, WI 54702–4004 Phone: 715–836–3301 Fax: 715–836–2924 e-mail: [email protected] 1 2 Encyclopedia of Physical Science and Technology I. Introduction II. Historical background III. Definition of Fourier series IV. Convergence of Fourier series V. Convergence in norm VI. Summability of Fourier series VII. Generalized Fourier series VIII. Discrete Fourier series IX. Conclusion GLOSSARY ¢¤£¦¥¨§ Bounded variation: A function has bounded variation on a closed interval ¡ ¢ if there exists a positive constant © such that, for all finite sets of points "! "! $#&% (' #*) © ¥ , the inequality is satisfied. Jordan proved that a function has bounded variation if and only if it can be expressed as the difference of two non-decreasing functions. Countably infinite set: A set is countably infinite if it can be put into one-to-one £0/"£ correspondence with the set of natural numbers ( +,£¦-.£ ). Examples: The integers and the rational numbers are countably infinite sets. "! "!;: # # 123547698 Continuous function: If , then the function is continuous at the point : . Such a point is called a continuity point for . A function which is continuous at all points is simply referred to as continuous. Lebesgue measure zero: A set < of real numbers is said to have Lebesgue measure ! $#¨CED B ¢ £¦¥ zero if, for each =?>A@ , there exists a collection of open intervals such ! ! D D J# K% $#L) ¢ £¦¥ ¥ ¢ = that <GFIH and . Examples: All finite sets, and all countably infinite sets, have Lebesgue measure zero. "! "! % # % # Odd and even functions: A function is odd if for all in its "! "! % # # domain. -

The Summation of Power Series and Fourier Series
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Journal of Computational and Applied Mathematics 12&13 (1985) 447-457 447 North-Holland The summation of power series and Fourier . series I.M. LONGMAN Department of Geophysics and Planetary Sciences, Tel Aviv University, Ramat Aviv, Israel Received 27 July 1984 Abstract: The well-known correspondence of a power series with a certain Stieltjes integral is exploited for summation of the series by numerical integration. The emphasis in this paper is thus on actual summation of series. rather than mere acceleration of convergence. It is assumed that the coefficients of the series are given analytically, and then the numerator of the integrand is determined by the aid of the inverse of the two-sided Laplace transform, while the denominator is standard (and known) for all power series. Since Fourier series can be expressed in terms of power series, the method is applicable also to them. The treatment is extended to divergent series, and a fair number of numerical examples are given, in order to illustrate various techniques for the numerical evaluation of the resulting integrals. Keywork Summation of series. 1. Introduction We start by considering a power series, which it is convenient to write in the form s(x)=/.Q-~2x+&x2..., (1) for reasons which will become apparent presently. Here there is no intention to limit ourselves to alternating series since, even if the pLkare all of one sign, x may take negative and even complex values. It will be assumed in this paper that the pLk are real. -

Harmonic Analysis from Fourier to Wavelets
STUDENT MATHEMATICAL LIBRARY ⍀ IAS/PARK CITY MATHEMATICAL SUBSERIES Volume 63 Harmonic Analysis From Fourier to Wavelets María Cristina Pereyra Lesley A. Ward American Mathematical Society Institute for Advanced Study Harmonic Analysis From Fourier to Wavelets STUDENT MATHEMATICAL LIBRARY IAS/PARK CITY MATHEMATICAL SUBSERIES Volume 63 Harmonic Analysis From Fourier to Wavelets María Cristina Pereyra Lesley A. Ward American Mathematical Society, Providence, Rhode Island Institute for Advanced Study, Princeton, New Jersey Editorial Board of the Student Mathematical Library Gerald B. Folland Brad G. Osgood (Chair) Robin Forman John Stillwell Series Editor for the Park City Mathematics Institute John Polking 2010 Mathematics Subject Classification. Primary 42–01; Secondary 42–02, 42Axx, 42B25, 42C40. The anteater on the dedication page is by Miguel. The dragon at the back of the book is by Alexander. For additional information and updates on this book, visit www.ams.org/bookpages/stml-63 Library of Congress Cataloging-in-Publication Data Pereyra, Mar´ıa Cristina. Harmonic analysis : from Fourier to wavelets / Mar´ıa Cristina Pereyra, Lesley A. Ward. p. cm. — (Student mathematical library ; 63. IAS/Park City mathematical subseries) Includes bibliographical references and indexes. ISBN 978-0-8218-7566-7 (alk. paper) 1. Harmonic analysis—Textbooks. I. Ward, Lesley A., 1963– II. Title. QA403.P44 2012 515.2433—dc23 2012001283 Copying and reprinting. Individual readers of this publication, and nonprofit libraries acting for them, are permitted to make fair use of the material, such as to copy a chapter for use in teaching or research. Permission is granted to quote brief passages from this publication in reviews, provided the customary acknowledgment of the source is given. -

Convolution.Pdf
Convolution March 22, 2020 0.0.1 Setting up [23]: from bokeh.plotting import figure from bokeh.io import output_notebook, show,curdoc from bokeh.themes import Theme import numpy as np output_notebook() theme=Theme(json={}) curdoc().theme=theme 0.1 Convolution Convolution is a fundamental operation that appears in many different contexts in both pure and applied settings in mathematics. Polynomials: a simple case Let’s look at a simple case first. Consider the space of real valued polynomial functions P. If f 2 P, we have X1 i f(z) = aiz i=0 where ai = 0 for i sufficiently large. There is an obvious linear map a : P! c00(R) where c00(R) is the space of sequences that are eventually zero. i For each integer i, we have a projection map ai : c00(R) ! R so that ai(f) is the coefficient of z for f 2 P. Since P is a ring under addition and multiplication of functions, these operations must be reflected on the other side of the map a. 1 Clearly we can add sequences in c00(R) componentwise, and since addition of polynomials is also componentwise we have: a(f + g) = a(f) + a(g) What about multiplication? We know that X Xn X1 an(fg) = ar(f)as(g) = ar(f)an−r(g) = ar(f)an−r(g) r+s=n r=0 r=0 where we adopt the convention that ai(f) = 0 if i < 0. Given (a0; a1;:::) and (b0; b1;:::) in c00(R), define a ∗ b = (c0; c1;:::) where X1 cn = ajbn−j j=0 with the same convention that ai = bi = 0 if i < 0. -

Fourier Series of Functions of A-Bounded Variation
PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 74, Number 1, April 1979 FOURIER SERIES OF FUNCTIONS OF A-BOUNDED VARIATION DANIEL WATERMAN1 Abstract. It is shown that the Fourier coefficients of functions of A- bounded variation, A = {A„}, are 0(Kn/n). This was known for \, = n&+l, — 1 < ß < 0. The classes L and HBV are shown to be complementary, but L and ABV are not complementary if ABV is not contained in HBV. The partial sums of the Fourier series of a function of harmonic bounded variation are shown to be uniformly bounded and a theorem analogous to that of Dirichlet is shown for this class of functions without recourse to the Lebesgue test. We have shown elsewhere that functions of harmonic bounded variation (HBV) satisfy the Lebesgue test for convergence of their Fourier series, but if a class of functions of A-bounded variation (ABV) is not properly contained in HBV, it contains functions whose Fourier series diverge [1]. We have also shown that Fourier series of functions of class {nB+x} — BV, -1 < ß < 0, are (C, ß) bounded, implying that the Fourier coefficients are 0(nB) [2]. Here we shall estimate the Fourier coefficients of functions in ABV. Without recourse to the Lebesgue test, we shall prove a theorem for functions of HBV analogous to that of Dirichlet and also show that the partial sums of the Fourier series of an HBV function are uniformly bounded. From this one can conclude that L and HBV are complementary classes, i.e., Parseval's formula holds (with ordinary convergence) for/ G L and g G HBV. -

C 2013 Johannes Traa
c 2013 Johannes Traa MULTICHANNEL SOURCE SEPARATION AND TRACKING WITH PHASE DIFFERENCES BY RANDOM SAMPLE CONSENSUS BY JOHANNES TRAA THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in Electrical and Computer Engineering in the Graduate College of the University of Illinois at Urbana-Champaign, 2013 Urbana, Illinois Adviser: Assistant Professor Paris Smaragdis ABSTRACT Blind audio source separation (BASS) is a fascinating problem that has been tackled from many different angles. The use case of interest in this thesis is that of multiple moving and simultaneously-active speakers in a reverberant room. This is a common situation, for example, in social gatherings. We human beings have the remarkable ability to focus attention on a particular speaker while effectively ignoring the rest. This is referred to as the \cocktail party effect” and has been the holy grail of source separation for many decades. Replicating this feat in real-time with a machine is the goal of BASS. Single-channel methods attempt to identify the individual speakers from a single recording. However, with the advent of hand-held consumer electronics, techniques based on microphone array processing are becoming increasingly popular. Multichannel methods record a sound field from various locations to incorporate spatial information. If the speakers move over time, we need an algorithm capable of tracking their positions in the room. For compact arrays with 1-10 cm of separation between the microphones, this can be accomplished by applying a temporal filter on estimates of the directions-of-arrival (DOA) of the speakers. In this thesis, we review recent work on BSS with inter-channel phase difference (IPD) features and provide extensions to the case of moving speakers. -

Wrapped Log Kumaraswamy Distribution and Its Applications
International Journal of Mathematics and Computer Research ISSN: 2320-7167 Volume 06 Issue 10 October-2018, Page no. - 1924-1930 Index Copernicus ICV: 57.55 DOI: 10.31142/ijmcr/v6i10.01 Wrapped Log Kumaraswamy Distribution and its Applications K.K. Jose1, Jisha Varghese2 1,2Department of Statistics, St.Thomas College, Palai,Arunapuram Mahatma Gandhi University, Kottayam, Kerala- 686 574, India ARTICLE INFO ABSTRACT Published Online: A new circular distribution called Wrapped Log Kumaraswamy Distribution (WLKD) is introduced 10 October 2018 in this paper. We obtain explicit form for the probability density function and derive expressions for distribution function, characteristic function and trigonometric moments. Method of maximum likelihood estimation is used for estimation of parameters. The proposed model is also applied to a Corresponding Author: real data set on repair times and it is established that the WLKD is better than log Kumaraswamy K.K. Jose distribution for modeling the data. KEYWORDS: Log Kumaraswamy-Geometric distribution, Wrapped Log Kumaraswamy distribution, Trigonometric moments. 1. Introduction a test, atmospheric temperatures, hydrological data, etc. Also, Kumaraswamy (1980) introduced a two-parameter this distribution could be appropriate in situations where distribution over the support [0, 1], called Kumaraswamy scientists use probability distributions which have infinite distribution (KD), for double bounded random processes for lower and (or) upper bounds to fit data, where as in reality the hydrological applications. The Kumaraswamy distribution is bounds are finite. Gupta and Kirmani (1988) discussed the very similar to the Beta distribution, but has the important connection between non-homogeneous Poisson process advantage of an invertible closed form cumulative (NHPP) and record values. -
Chapter 2 Parameter Estimation for Wrapped Distributions
ABSTRACT RAVINDRAN, PALANIKUMAR. Bayesian Analysis of Circular Data Using Wrapped Dis- tributions. (Under the direction of Associate Professor Sujit K. Ghosh). Circular data arise in a number of different areas such as geological, meteorolog- ical, biological and industrial sciences. We cannot use standard statistical techniques to model circular data, due to the circular geometry of the sample space. One of the com- mon methods used to analyze such data is the wrapping approach. Using the wrapping approach, we assume that, by wrapping a probability distribution from the real line onto the circle, we obtain the probability distribution for circular data. This approach creates a vast class of probability distributions that are flexible to account for different features of circular data. However, the likelihood-based inference for such distributions can be very complicated and computationally intensive. The EM algorithm used to compute the MLE is feasible, but is computationally unsatisfactory. Instead, we use Markov Chain Monte Carlo (MCMC) methods with a data augmentation step, to overcome such computational difficul- ties. Given a probability distribution on the circle, we assume that the original distribution was distributed on the real line, and then wrapped onto the circle. If we can unwrap the distribution off the circle and obtain a distribution on the real line, then the standard sta- tistical techniques for data on the real line can be used. Our proposed methods are flexible and computationally efficient to fit a wide class of wrapped distributions. Furthermore, we can easily compute the usual summary statistics. We present extensive simulation studies to validate the performance of our method. -
A General Approach for Obtaining Wrapped Circular Distributions Via Mixtures
UC Santa Barbara UC Santa Barbara Previously Published Works Title A General Approach for obtaining wrapped circular distributions via mixtures Permalink https://escholarship.org/uc/item/5r7521z5 Journal Sankhya, 79 Author Jammalamadaka, Sreenivasa Rao Publication Date 2017 Peer reviewed eScholarship.org Powered by the California Digital Library University of California 1 23 Your article is protected by copyright and all rights are held exclusively by Indian Statistical Institute. This e-offprint is for personal use only and shall not be self- archived in electronic repositories. If you wish to self-archive your article, please use the accepted manuscript version for posting on your own website. You may further deposit the accepted manuscript version in any repository, provided it is only made publicly available 12 months after official publication or later and provided acknowledgement is given to the original source of publication and a link is inserted to the published article on Springer's website. The link must be accompanied by the following text: "The final publication is available at link.springer.com”. 1 23 Author's personal copy Sankhy¯a:TheIndianJournalofStatistics 2017, Volume 79-A, Part 1, pp. 133-157 c 2017, Indian Statistical Institute ! AGeneralApproachforObtainingWrappedCircular Distributions via Mixtures S. Rao Jammalamadaka University of California, Santa Barbara, USA Tomasz J. Kozubowski University of Nevada, Reno, USA Abstract We show that the operations of mixing and wrapping linear distributions around a unit circle commute, and can produce a wide variety of circular models. In particular, we show that many wrapped circular models studied in the literature can be obtained as scale mixtures of just the wrapped Gaussian and the wrapped exponential distributions, and inherit many properties from these two basic models. -

Convergence of Fourier Series
CONVERGENCE OF FOURIER SERIES KEVIN STEPHEN STOTTER CUDDY Abstract. This paper sets out to explore and explain some of the basic con- cepts of Fourier analysis and its applications. Convolution and questions of convergence will be central. An application to the isoperimetric inequality will conclude the paper. Contents 1. Introduction to Fourier Series 1 2. Convolution and Kernels 2 3. Criteria for Convergence 8 4. Isoperimetric Inequality 18 Acknowledgments 19 References 19 1. Introduction to Fourier Series It will be important for the reader to recall Euler's Formula: ix (1.1) e = cos(x) + i sin(x); 8x 2 R Throughout this paper, an \integrable" function should be interpreted as integrable in the Riemann sense as well as bounded. Definition 1.2. For an integrable, bounded function f :[a; b] ! C we can define, for any integer n, the nth Fourier coefficient 1 Z b f^(n) = f(x)e−2πinx=(b−a)dx: b − a a When there is no question about the function we are referring to we may write ^ P1 ^ 2πinx f(n) = an. From these coefficients we get the Fourier series S(x) = n=−∞ f(n)e (note that this sum may or may not converge). To denote that a Fourier series is associated to a function f we write 1 X f ∼ f^(n)e2πinx n=−∞ Definition 1.3. The N th partial sum of the Fourier series for f, where N is a PN ^ 2πinx=L positive integer, is given by SN (f)(x) = n=−N f(n)e . Date: DEADLINE AUGUST 26, 2012.