Research Horizons March 2020
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

TEAM ID UNIVERSITY INSTITUTE NAME FACULTY NAME TEAM LEADER TEAM MEMEBERS Student TG000014 GUJARAT L.D.COLLEGE of PROF
No of TEAM ID UNIVERSITY INSTITUTE NAME FACULTY NAME TEAM LEADER TEAM MEMEBERS Student TG000014 GUJARAT L.D.COLLEGE OF PROF. U V PANCHOLI MAHESHWARI ASHWINIKUMARI 1 TECHNOLOGICAL ENGINEERING, AHMEDABAD UNIVERSITY, 028 (ID: C-212) AHMEDBABD (ID: U- 0135) TG000015 GUJARAT GOVERNMENT ENGINEERING VIJAY GHUSABHAI BHUVA S VINAYRAO S KRISHNARAO JANI BRIJESH KISHORBHAI 4 TECHNOLOGICAL COLLEGE, BHARUCH 014 (ID: C- BHAMRE ARPITA KARBHARI UNIVERSITY, 271) SOLANKI KRISHNABEN AHMEDBABD (ID: U- RAJUBHAI 0135) TG000016 R K UNIVERSITY, SCHOOL OF PHARMACY, RK VIPUL PATEL KISHAN SOJITRA 1 RAJKOT (ID: U-0647) UNIVERSITY, RAJKOT (ID: C- 355) TG000017 R K UNIVERSITY, SCHOOL OF PHARMACY, RK VIPUL PATEL DIXITA LIMBASIYA 1 RAJKOT (ID: U-0647) UNIVERSITY, RAJKOT (ID: C- 355) TG000018 R K UNIVERSITY, SCHOOL OF PHARMACY, RK VIPUL PATEL RAJESH DEVANI 1 RAJKOT (ID: U-0647) UNIVERSITY, RAJKOT (ID: C- 355) TG000019 R K UNIVERSITY, SCHOOL OF DIPLOMA STUDIES, RK UNIVERSITY SIDHHARTH AGRAVAT HARDIK AGHERA 6 RAJKOT (ID: U-0647) RK UNIVERSITY, RAJKOT (ID: C- SHUBHAM KACHA 33) PARTH CHAUHAN ROMIT HIRAPARA PINTU CHOVATIYA TG000020 GUJARAT DR. JIVRAJ MEHTA INSTITUTE ASST.PROF. RAHUL PATEL CHAHAT SHAH JAY KHAPRE 2 TECHNOLOGICAL OF TECHNOLOGY, ANAND 082 UNIVERSITY, (ID: C-140) AHMEDBABD (ID: U- 0135) TG000021 GANPAT UNIVERSITY, GANPAT UNIVERSITY S.K. DR.BHUPENDRA G. VARDE MAYUR V. SUTHAR JIGAR 8 GANPAT VIDYANAGAR, PATEL COLLEGE OF PRAJAPATI PRAJAPATI DHARMEDRA KHERVA (ID: U-0132) PHARMACEUTICAL PRAJAPATI RAMESH EDUCATION & RESEARCH (ID: THAKKAR MAULIN C-446) MODI DHARV PRAJAPATI -

Student Handbook 2020-21
U N I V E R S I T Y SCHOOL OF SCIENCES STUDENT HANDBOOK 2020-21 U N I V E R S I T Y SCHOOL OF SCIENCES ABOUT THE UNIVERSITY P P Savani Education Trust was launched in 1987, initially with a school, which over the year expanded itself with a group of schools in Surat district with student strength of more than 45,000. In 2016, the Trust has expanded its horizon with the launch of P P Savani University, as an initiative in higher education aligned with global standards of excellence. Through this immersive educational endeavor, the Governing body aims to introduce South Gujarat to a new era in higher education and create a talent pool of professionally sensitized industry- ready professionals. A world class 100 acre campus has been developed which embodies an infrastructure facilitating undergraduate, postgraduate, research, certificate and skill- development programmes. Ph.D. Biotechnology/Microbiology/Chemistry M.Sc. Biotechnology/Microbiology/Chemistry, PGDMLT B.Sc. (Honours) Biotechnology/Microbiology/Chemistry/IT/Fire and Safety/IT NH10, Near Biltech Company, Village: Dhamdod, Kosamba, Ta: Mangrol, Dist: Surat – 394125 Mo.No: 09879608000 · Email: [email protected]· Website: www.ppsu.ac.in U N I V E R S I T Y SCHOOL OF SCIENCES MESSAGE FROM THE DIRECTOR School of Sciences, P P Savani University, Surat impart education and addressing the biotechnological, microbiological and environmental challenges that our society faces. Among our new and continuing education and outreach initiatives are the flourishing Bachelor of Science Degree in Biotechnology, Microbiology and Environmental Science, for which we are now beginning to continuing their education at leading graduate school programs. -
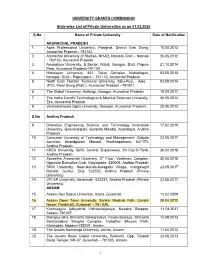
UNIVERSITY GRANTS COMMISSION State-Wise List of Private
UNIVERSITY GRANTS COMMISSION State-wise List of Private Universities as on 01.02.2020 S.No Name of Private University Date of Notification ARUNACHAL PRADESH 1. Apex Professional University, Pasighat, District East Siang, 10.05.2013 Arunachal Pradesh - 791102. 2. Arunachal University of Studies, NH-52, Namsai, Distt – Namsai 26.05.2012 - 792103, Arunachal Pradesh. 3. Arunodaya University, E-Sector, Nirjuli, Itanagar, Distt. Papum 21.10.2014 Pare, Arunachal Pradesh-791109 4. Himalayan University, 401, Takar Complex, Naharlagun, 03.05.2013 Itanagar, Distt – Papumpare – 791110, Arunachal Pradesh. 5. North East Frontier Technical University, Sibu-Puyi, Aalo 03.09.2014 (PO), West Siang (Distt.), Arunachal Pradesh –791001. 6. The Global University, Hollongi, Itanagar, Arunachal Pradesh. 18.09.2017 7. The Indira Gandhi Technological & Medical Sciences University, 26.05.2012 Ziro, Arunachal Pradesh. 8. Venkateshwara Open University, Itanagar, Arunachal Pradesh. 20.06.2012 S.No Andhra Pradesh 9. Bharatiya Engineering Science and Technology Innovation 17.02.2019 University, Gownivaripalli, Gorantla Mandal, Anantapur, Andhra Pradesh 10. Centurian University of Technology and Management, Gidijala 23.05.2017 Junction, Anandpuram Mandal, Visakhapatnam- 531173, Andhra Pradesh. 11. KREA University, 5655, Central, Expressway, Sri City-517646, 30.04.2018 Andhra Pradesh 12. Saveetha Amaravati University, 3rd Floor, Vaishnavi Complex, 30.04.2018 Opposite Executive Club, Vijayawada- 520008, Andhra Pradesh 13. SRM University, Neerukonda-Kuragallu Village, mangalagiri 23.05.2017 Mandal, Guntur, Dist- 522502, Andhra Pradesh (Private University) 14. VIT-AP University, Amaravati- 522237, Andhra Pradesh (Private 23.05.2017 University) ASSAM 15. Assam Don Bosco University, Azara, Guwahati 12.02.2009 16. Assam Down Town University, Sankar Madhab Path, Gandhi 29.04.2010 Nagar, Panikhaiti, Guwahati – 781 036. -

April 2019 Academics @ Soe……………………… 01 Students’ Achievements…...………
A Quarterly Institute E-Newsletter School of Engineering Highlights of the Issue… April 2019 Academics @ SoE……………………… 01 Students’ Achievements…...……….. 04 Research Erudite………………............ 06 Students’ Alley…………………............. 07 Faculty Thinks………………………….. 08 Nature through Engineer’s Eye..... .09 Creative Corner………………………… 10 Crossword Competition………..…… 12 મરણ 廒જલિ to Dhruvin………..………. 14 A p r i l 2 0 1 9 | 1 Academics @ SoE Eminent Experts @ SoE Mr. Nirav Sanghavi from Sophos Pvt. Ltd. delivered an expert talk to the students of 4th semester, Computer Engineering & Information Technology on the topic ‘The Agile Classroom-Engraving an Agile Mindset’ on March 9, 2019. Dr. Mathurkumar S Bhakhar, Professor, Chemical Engineering Department, G H Patel College of Engineering & Technology, Vallabh Vidyanagar, Anand delivered an expert session to the Chemical Engineering students on ‘Kinetic Study on Extraction of Heavy Metals using Emulsion Liquid membranes’ on March 5, 2019. Dr. Narendra Patel, Associate Professor, BVM Engineering College, V V Nagar delivered an expert talk on ‘Basics of Operating System’ on March 23, 2019 for the 2nd year students of Computer & IT Engineering. A workshop on ‘Fundamentals of Computer Graphics’ was organized on March 28-29, 2019 from 8:00 am to 4:00 pm for the 4th semester students of Computer Engineering and Information Technology. Mr. Chintan A. Gajjar from S & S.S. Gandhy College of Engineering & Technology was invited as an expert for the session. The entire workshop proved to be very fruitful to the students. Industrial Exposure Mechanical Engineering 2nd year nd An Industrial Visit for the 2 Year Chemical, Civil and students visited Mayur Plastic Mechanical Engineering students at Ankleshwar Industry at Ankleshwar GIDC on Industrial Expo - 2019 for level 2 on January 4, 2019. -

Consolidated List Private Universities
UNIVERSITY GRANTS COMMISSION State-wise List of Private Universities as on 06.08.2021 S.No Name of Private University Date of Notification ARUNACHAL PRADESH 1. Apex Professional University, Pasighat, District East Siang, 10.05.2013 Arunachal Pradesh - 791102. 2. Arunachal University of Studies, NH-52, Namsai, Distt – Namsai 26.05.2012 - 792103, Arunachal Pradesh. 3. Arunodaya University, E-Sector, Nirjuli, Itanagar, Distt. Papum 21.10.2014 Pare, Arunachal Pradesh-791109 4. Himalayan University, 401, Takar Complex, Naharlagun, 03.05.2013 Itanagar, Distt – Papumpare – 791110, Arunachal Pradesh. 5. North East Frontier Technical University, Sibu-Puyi, Aalo 03.09.2014 (PO), West Siang (Distt.), Arunachal Pradesh –791001. 6. The Global University, Hollongi, Itanagar, Arunachal Pradesh. 18.09.2017 7. The Indira Gandhi Technological & Medical Sciences University, 26.05.2012 Ziro, Arunachal Pradesh. 8. Venkateshwara Open University, Itanagar, Arunachal Pradesh. 20.06.2012 Andhra Pradesh 9. Bharatiya Engineering Science and Technology Innovation 17.02.2019 University, Gownivaripalli, Gorantla Mandal, Anantapur, Andhra Pradesh 10. Centurian University of Technology and Management, Gidijala 23.05.2017 Junction, Anandpuram Mandal, Visakhapatnam- 531173, Andhra Pradesh. 11. KREA University, 5655, Central, Expressway, Sri City-517646, 30.04.2018 Andhra Pradesh 12. Saveetha Amaravati University, 3rd Floor, Vaishnavi Complex, 30.04.2018 Opposite Executive Club, Vijayawada- 520008, Andhra Pradesh 13. SRM University, Neerukonda-Kuragallu Village, mangalagiri 23.05.2017 Mandal, Guntur, Dist- 522502, Andhra Pradesh (Private University) 14. VIT-AP University, Amaravati- 522237, Andhra Pradesh (Private 23.05.2017 University) ASSAM 15. Assam Don Bosco University, Azara, Guwahati 12.02.2009 16. Assam Down Town University, Sankar Madhab Path, Gandhi 29.04.2010 Nagar, Panikhaiti, Guwahati – 781 036. -

University Aishe Code
University Aishe Code Aishe Srno Code University Name 1 U-0122 Ahmedabad University (Id: U-0122) 2 U-0830 ANANT NATIONAL UNIVERSITY (Id: U-0830) 3 U-0125 Carlox Teachers University, Ahmedabad (Id: U-0125) Centre for Environmental Planning and Technology University, Ahmedabad (Id: U- 4 U-0127 0127) 5 U-0131 Dr. Babasaheb Ambedkar Open University, Ahmedabad (Id: U-0131) 6 U-0775 GLS UNIVERSITY (Id: U-0775) 7 U-0135 Gujarat Technological University, Ahmedbabd (Id: U-0135) 8 U-0136 Gujarat University, Ahmedabad (Id: U-0136) 9 U-0817 GUJARAT UNIVERSITY OF TRANSPLANTATION SCIENCES (Id: U-0817) 10 U-0137 Gujarat Vidyapith, Ahmedabad (Id: U-0137) 11 U-0139 Indian Institute of Technology, Gandhinagar (Id: U-0139) 12 U-0922 Indrashil University (Id: U-0922) INSTITUTE OF INFRASTRUCTURE TECHNOLOGY RESEARCH AND MANAGEMENT 13 U-0765 (IITRAM) (Id: U-0765) 14 U-0734 LAKULISH YOGA UNIVERSITY, AHMEDABAD (Id: U-0734) 15 U-0146 Nirma University, Ahmedabad (Id: U-0146) 16 U-0790 RAI UNIVERSITY (Id: U-0790) 17 U-0595 Rakshashakti University, Gujarat (Id: U-0595) 18 U-0123 Anand Agricultural University, Anand (Id: U-0123) 19 U-0128 Charotar University of Science & Technology, Anand (Id: U-0128) 20 U-0148 Sardar Patel University, Vallabh Vidyanagar (Id: U-0148) 21 U-0150 Sardarkrushinagar Dantiwada Agricultural University, Banaskantha (Id: U-0150) 22 U-0124 Maharaja Krishnakumarsinhji Bhavnagar University (Id: U-0124) 23 U-0126 Central Univeristy of Gujarat, Gandhinagar (Id: U-0126) 24 U-0594 Children University, Gandhinagar (Id: U-0594) Dhirubhai Ambani Institute -

Seats Vacant Due to Non-Allotment in BE 2019 Mock Round
Seats Vacant due to non-allotment in BE 2019 Mock Round Inst_Name Course_name Total Vacant A.D.Patel Institute Of Tech.,Karamsad AUTOMOBILE ENGINEERING 56 1 A.D.Patel Institute Of Tech.,Karamsad CIVIL ENGINEERING 56 27 A.D.Patel Institute Of Tech.,Karamsad ELECTRICAL ENGINEERING 56 44 A.D.Patel Institute Of Tech.,Karamsad ELECTRONICS & COMMUNICATION ENGG. 56 30 A.D.Patel Institute Of Tech.,Karamsad MECHANICAL ENGINEERING 113 58 ADITYA SILVER OAK INSTITUTE OF TECHNOLOGY (WITHIN LIMITS OF ELECTRICAL ENGINEERING 56 37 AHMEDABAD MUNICIPAL CORPORATION) AHMEDABAD ADITYA SILVER OAK INSTITUTE OF TECHNOLOGY (WITHIN LIMITS OF MECHANICAL ENGINEERING 56 4 AHMEDABAD MUNICIPAL CORPORATION) AHMEDABAD ADITYA SILVER OAK INSTITUTE OF TECHNOLOGY (WITHIN LIMITS OF Mechanical Engineering- Shift 2 56 55 AHMEDABAD MUNICIPAL CORPORATION) AHMEDABAD Ahmedabad Institute Of Tech, Ahmedabad AUTOMOBILE ENGINEERING 39 18 Ahmedabad Institute Of Tech, Ahmedabad CIVIL ENGINEERING 79 49 Ahmedabad Institute Of Tech, Ahmedabad ELECTRICAL ENGINEERING 40 32 Ahmedabad Institute Of Tech, Ahmedabad ELECTRONICS & COMMUNICATION ENGG. 40 13 Ahmedabad Institute Of Tech, Ahmedabad MECHANICAL ENGINEERING 119 86 Ahmedabad Institute Of Tech, Ahmedabad Mechanical Engineering- Shift 2 79 78 Alpha College Of Engg. & Tech., Khatraj, Kalol CIVIL ENGINEERING 113 106 Alpha College Of Engg. & Tech., Khatraj, Kalol COMPUTER ENGINEERING 113 4 Alpha College Of Engg. & Tech., Khatraj, Kalol ELECTRICAL ENGINEERING 56 53 Alpha College Of Engg. & Tech., Khatraj, Kalol ELECTRONICS & COMMUNICATION ENGG. -

(Formerly University of Pune) CIRCULAR No
SAVITRIBAI PHULE PUNE UNIVERSITY (Formerly University of Pune) CIRCULAR No. 125 of 2019 INFORMATION REGARDING CONDITIONS OF ELIGIBILITY FOR VARIOUS UNIVERSITY COURSES. Website : http://unipune.ac.in Hon’ble Dr. Nitin Karmalkar Vice-Chancellor, Savitribai Phule Pune University Hon’ble Dr. N. S. Umrani Pro-Vice-Chancellor, Savitribai Phule Pune University Eligibility Staff Members 1. Dr. P. V. Kulkarni Dy. Registrar ( Eligibility and External Section) Ph. : 25601272 2. Smt M. J. D’souza Asstt. Section Officer Ph. : 25601266 3. Shri. S. D. Salve Assistant Ph. : 25601266 4. Smt. G. J. Zagade Assistant Ph. : 25601266 5. Smt. B. T. Patil Assistant Ph. : 25601266 6. Shri. K. B. Ghunawat Assistant Ph. : 25601266 INDEX Sr. No. Title Page No. 1. Circular .... 1 - 7 2. Faculty wise and yearwise No of Students Enrolled .... 8 3. Government Resolution for equivalence of I.T.I. .... 9 - 19 4. Faculty of Science and Technology 1. Sciences .... 20 -31 2. Engineering .... 32 -39 3. Technology .... 40 - 41 4. Pharmaceutical Science .... 42 - 43 5. Faculty of Commerce and Management 1. Commerce .... 44 - 47 2. Management .... 48 - 51 6. Faculty of Interdiscipliry 1. Education .... 52 - 54 2. Physical Education .... 55 - 57 7. Faculty of Humanities 1. Arts & Fine Arts .... 58 - 62 2. Mental Moral & Social Sciences .... 63 - 67 3. Law .... 68 - 71 8. M.Phil. & Ph.D. .... 72 - 73 9. Definition .... 74 - 75 10. Instructions For the Final List of Eligibility Chart I .... 76 - 77 11. Annexure ‘A’ Eligibility Fee .... 78 12. Procedure for Migration Certificate Application .... 79 13. U.C.G. Recognised University .... 80- 121 14. State Board of School Education List ... -

University Grants Commission Bahadur Shah Zafar Marg
UNIVERSITY GRANTS COMMISSION BAHADUR SHAH ZAFAR MARG NEW DELHI-110002 Performa for submission of information by State Private University’s for ascertaining Their norms and standards A. Legal Status 1.1 Name and Address of the University P. P. Savani University 1.2 Headquarters of the University NH 8, GETCO, Near Biltech, Village: Dhamdod, Kosamba, Dist.: Surat - 394125 1.3 Information about University a. Website:- http://www.ppsu.ac.in b. E-mail :- [email protected] c. Phone Nos. :- 9879608000 d. Fax Nos. 02612577300 Information about Authorities of the University a. President : Shree Vallabhbhai Savani Ph. (including mobile), :- 9512035601 Fax Nos. E-mail b. Vice- Chancellor : Dr. Parag Sanghani Ph. (including mobile):- 9898484821 Fax Nos. :- E-mail :- [email protected] c. Registrar : Dr. Bindesh Patel Ph. (including mobile) :- 9512035615 Fax Nos. E-mail :- [email protected] d. Finance Officer Ph. (including mobile):- Fax Nos. E-mail :- 1.4 Date of Establishment 31/03/2017 1.5 Name of the society / Trust promoting the University P. P. Savani (Information may be provided in the following format) Knowledge city (Copy of the registered MOA/Trust Deed to be enclosed) 1.6 Composition of the Society /Trust Appendix 1 Name Address occupation Designation In the Society/Trust (Details to be provided in Appendix-1) 1.7 Whether the member of the Society /Trust are Appendix 2 Members in other Societies /Trusts or in the Board of Governors in companies? If yes, please provide details in The following format:- Name of the Address Name of the -

Mansee Bal Bhargava
Skype/Linkedin/ Mansee Bal Bhargava, PhD Facebook/Twitter: Entrepreneur | Researcher | Educator bal.mansee www.mansee.in Google+: Phone: 0091 98240 92804 mansee bal Email: [email protected] Academic and Professional Involvements Since Jun’95- - Research Entrepreneur. Environmental Design Consultants (EDC), Ahmedabad Since Sep’09- - Independent Research, Guest Speaking and Coordinating Designed Courses Since Jan’03- - Founder Volunteer, Eco Development and Research Cell, Ahmedabad (not for profit) Since Nov’20- - Visiting Faculty at School of Architecture, Central University of Rajasthan, Ajmer - Managing Editor, Connections for Sustainability Journal, managed by the Remote Connections for Sustainability, The Netherlands - Expert Evaluator, Paris Region Fellowship Programme (ParisRegionFP) Since Sep’20- - Visiting Faculty at TERI School of Advance Studies, New Delhi Since Mar’15- - Affiliated Faculty. The Ostroms Workshop, Indiana University, Bloomington, USA & Institute for Housing and Urban Development Studies, Erasmus University Rotterdam Since Jan’20- - Member, Board of Studies, Department of Sustainable Architecture, Central University Rajasthan, Ajmer; and Department of Architecture, KLE Technological University, Hubli Since July’18- - Visiting Prof. Indian Institute of Technology Bhilai, Raipur - Member, Board of the SDG Center at Presidency University Bengaluru July-Oct’2020 - Executive Director, SaciWATERs, Hyderabad, India Feb’-July’2020 - Prof. Amity School of Architecture, Amity University Chhattisgarh, Raipur - Visiting Prof. SAL School of Architecture, Gujarat Technical University, Ahmedabad Jan’18-June’20 - In different capacities (Full-Time Prof., Adjunct Prof., Visiting Prof.) at Institute of July’15-Dec’18 Architecture and Planning, Nirma University, Ahmedabad Mar-Apr’2018 - Expert Evaluator for the Central Evaluation of Research and Innovation projects of H2020(2018) at the European Research Executive Agency Sep’16-June’17 - Fulbright Prof. -
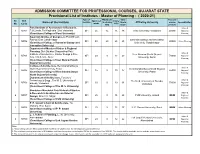
Master of Planning - ( 2020-21) Type of MQ Quota State Fees Per Sr
ADMISSION COMMITTEE FOR PROFESSIONAL COURSES, GUJARAT STATE Provisional List of Institutes - Master of Planning - ( 2020-21) Type of MQ Quota State Fees per Sr. Inst Approved Intake Institute (Including Quota Affiliating University annum Specialization Name of the Institute Intake 125% No Code NRI) Seats 2019-20* Parul Institute of Architecture & Research, Urban & 1 MP01 P.O.Limda, Ta:Waghodia, Dist: Vadodara SFI 25 12 16 16 Parul University, Vadodara 40000 Regional (Constituent College of Parul University) Planning Swarrnim Institue of Designs, At Post Bhoyan Rathod, Dist: Gandhinagar Swarrnim Startup and Innovation 2 MP02 SFI 40 20 25 25 40000 Urban Planning (Constituent College of Swarnim Startup and University, Gandhinagar Innovation University) Department of Master of Urban & Regional Planning, Shri Gijubhai Chaganbhai Patel Institute of Architecture, Interior Design & Fine Veer Narmad South Gujarat Urban & 3 MP04 SFI 20 0 13 23 70000 Regional Arts, V.N.S.G.U., Surat University, Surat Planning (Constituent College of Veer Narmad South Gujarat University) Institute of Architecture, Hemchandracharya North Gujarat University, Patan Hemchandracharya North Gujarat Urban & 4 MP05 SFI 15 0 10 17 55000 Regional (Constituent College of Hemchandracharya University, Patan Planning North Gujarat University) Department of Architecture, Faculty of Technology & Engg., The M. S. University of The M. S. University of Baroda, Urban & 5 MP06 SFI 30 0 19 34 70000 Regional Baroda, Vadodara Vadodara (Constituent College of The M. S. University) Planning Shantaben Manubhai Patel School of Studies & Research in Architecture and Interior Urban & 6 MP07 Design, New V.V. Nagar SFI 25 0 15 28 CVM University, Anand NEW Regional Planning (Constituent College of CVM University) P. -
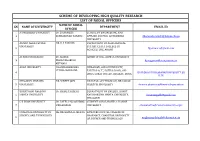
Updated List of University Nodal Officers for Verification.Pdf
SCHEME OF DEVELOPING HIGH QUALITY RESEARCH LIST OF NODAL OFFICERS NAME OF NODAL SN NAME OF UNIVERSITY DEPARTMENT EMAIL-ID OFFICER AHMEDABAD UNIVERSITY Dr. DHARMESH SCHOOL OF ENGINEERING AND 1 SUBHASHRAO VARADE APPLIED SCIENCE, AHMEDABAD [email protected] UNIVERSITY ANAND AGRICULTURE DR. D. J PARMAR DEPARTMENT OF AGRICULTURAL UNIVERSITY STATISTICS, B A COLLEGE OF 2 [email protected] AGRICULTURE, ANAND ATMIYA UNIVERSITY Dr. ASHISH ADMIN OFFICE, ATMIYA UNIVERSITY 3 MAHENDRABHAI [email protected] KOTHARI AURO UNIVERSITY CHANDRASHEKHAR LIBRARIAN, AURO UNIVERSITY, VITHAL MACHANA EARTHSPACE", HAZIRA ROAD, OPP 4 [email protected] ONGC, SURAT 394510, GUJARAT, INDIA U.IN BHAGWAN MAHAVIR DR. VINEET JAIN DIRECTOR OF PHARMACY, BHAGWAN 5 UNIVERSITY MAHAVIR UNIVERSITY [email protected] BHAKT KAVI NARSINH Dr. FIROZ A SHAIKH DEPARTMENT OF ENGLISH, BHAKT 6 MEHTA UNIVERSITY KAVI NARSINH MEHTA UNIVERSITY, [email protected] JUNAGADH C U SHAH UNIVERSITY Dr. PATEL PARAGKUMAR STUDENT SCHOLARSHIP, C U SHAH 7 DINESHBHAI UNIVERSITY [email protected] CHAROTAR UNIVERSITY OF Ms. MEGHANA H. MEHTA RAMANBHAI PATEL COLLEGE OF SCIENCE AND TECHNOLOGY PHARMACY, CHAROTAR UNIVERSITY 8 [email protected] OF SCIENCE AND TECHNOLOGY NAME OF NODAL SN NAME OF UNIVERSITY DEPARTMENT EMAIL-ID OFFICER CHARUTAR VIDYA MANDAL DR. SARVESH TRIVEDI DEPARTMENT OF IT CELL, CHARUTAR 9 (CVM) VIDYA MANDAL (CVM) [email protected] CHILDREN’S UNIVERSITY PROF. (DR.) SANJAY HEAD, DEPARTMENT OF [email protected] 10 GUPTA ACCREDITATION, CHILDREN’S [email protected] UNIVERSITY, GANDHINAGAR DHARMSINH DESAI Dr. CHANDULAL FACULTY OF TECHNOLOGY, 11 UNIVERSITY KHODABHAI DHARMSINH DESAI UNIVERSITY [email protected] BHENSDADIA DR.