Trace Register Allocation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Attacking Client-Side JIT Compilers.Key
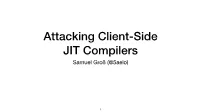
Attacking Client-Side JIT Compilers Samuel Groß (@5aelo) !1 A JavaScript Engine Parser JIT Compiler Interpreter Runtime Garbage Collector !2 A JavaScript Engine • Parser: entrypoint for script execution, usually emits custom Parser bytecode JIT Compiler • Bytecode then consumed by interpreter or JIT compiler • Executing code interacts with the Interpreter runtime which defines the Runtime representation of various data structures, provides builtin functions and objects, etc. Garbage • Garbage collector required to Collector deallocate memory !3 A JavaScript Engine • Parser: entrypoint for script execution, usually emits custom Parser bytecode JIT Compiler • Bytecode then consumed by interpreter or JIT compiler • Executing code interacts with the Interpreter runtime which defines the Runtime representation of various data structures, provides builtin functions and objects, etc. Garbage • Garbage collector required to Collector deallocate memory !4 A JavaScript Engine • Parser: entrypoint for script execution, usually emits custom Parser bytecode JIT Compiler • Bytecode then consumed by interpreter or JIT compiler • Executing code interacts with the Interpreter runtime which defines the Runtime representation of various data structures, provides builtin functions and objects, etc. Garbage • Garbage collector required to Collector deallocate memory !5 A JavaScript Engine • Parser: entrypoint for script execution, usually emits custom Parser bytecode JIT Compiler • Bytecode then consumed by interpreter or JIT compiler • Executing code interacts with the Interpreter runtime which defines the Runtime representation of various data structures, provides builtin functions and objects, etc. Garbage • Garbage collector required to Collector deallocate memory !6 Agenda 1. Background: Runtime Parser • Object representation and Builtins JIT Compiler 2. JIT Compiler Internals • Problem: missing type information • Solution: "speculative" JIT Interpreter 3. -

Incrementalized Pointer and Escape Analysis Frédéric Vivien, Martin Rinard
Incrementalized Pointer and Escape Analysis Frédéric Vivien, Martin Rinard To cite this version: Frédéric Vivien, Martin Rinard. Incrementalized Pointer and Escape Analysis. PLDI ’01 Proceedings of the ACM SIGPLAN 2001 conference on Programming language design and implementation, Jun 2001, Snowbird, United States. pp.35–46, 10.1145/381694.378804. hal-00808284 HAL Id: hal-00808284 https://hal.inria.fr/hal-00808284 Submitted on 14 Oct 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Incrementalized Pointer and Escape Analysis∗ Fred´ eric´ Vivien Martin Rinard ICPS/LSIIT Laboratory for Computer Science Universite´ Louis Pasteur Massachusetts Institute of Technology Strasbourg, France Cambridge, MA 02139 [email protected]strasbg.fr [email protected] ABSTRACT to those parts of the program that offer the most attrac- We present a new pointer and escape analysis. Instead of tive return (in terms of optimization opportunities) on the analyzing the whole program, the algorithm incrementally invested resources. Our experimental results indicate that analyzes only those parts of the program that may deliver this approach usually delivers almost all of the benefit of the useful results. An analysis policy monitors the analysis re- whole-program analysis, but at a fraction of the cost. -

1 More Register Allocation Interference Graph Allocators
More Register Allocation Last time – Register allocation – Global allocation via graph coloring Today – More register allocation – Clarifications from last time – Finish improvements on basic graph coloring concept – Procedure calls – Interprocedural CS553 Lecture Register Allocation II 2 Interference Graph Allocators Chaitin Briggs CS553 Lecture Register Allocation II 3 1 Coalescing Move instructions – Code generation can produce unnecessary move instructions mov t1, t2 – If we can assign t1 and t2 to the same register, we can eliminate the move Idea – If t1 and t2 are not connected in the interference graph, coalesce them into a single variable Problem – Coalescing can increase the number of edges and make a graph uncolorable – Limit coalescing coalesce to avoid uncolorable t1 t2 t12 graphs CS553 Lecture Register Allocation II 4 Coalescing Logistics Rule – If the virtual registers s1 and s2 do not interfere and there is a copy statement s1 = s2 then s1 and s2 can be coalesced – Steps – SSA – Find webs – Virtual registers – Interference graph – Coalesce CS553 Lecture Register Allocation II 5 2 Example (Apply Chaitin algorithm) Attempt to 3-color this graph ( , , ) Stack: Weighted order: a1 b d e c a1 b a e c 2 a2 b a1 c e d a2 d The example indicates that nodes are visited in increasing weight order. Chaitin and Briggs visit nodes in an arbitrary order. CS553 Lecture Register Allocation II 6 Example (Apply Briggs Algorithm) Attempt to 2-color this graph ( , ) Stack: Weighted order: a1 b d e c a1 b* a e c 2 a2* b a1* c e* d a2 d * blocked node CS553 Lecture Register Allocation II 7 3 Spilling (Original CFG and Interference Graph) a1 := .. -
Apache Harmony Project Tim Ellison Geir Magnusson Jr
The Apache Harmony Project Tim Ellison Geir Magnusson Jr. Apache Harmony Project http://harmony.apache.org TS-7820 2007 JavaOneSM Conference | Session TS-7820 | Goal of This Talk In the next 45 minutes you will... Learn about the motivations, current status, and future plans of the Apache Harmony project 2007 JavaOneSM Conference | Session TS-7820 | 2 Agenda Project History Development Model Modularity VM Interface How Are We Doing? Relevance in the Age of OpenJDK Summary 2007 JavaOneSM Conference | Session TS-7820 | 3 Agenda Project History Development Model Modularity VM Interface How Are We Doing? Relevance in the Age of OpenJDK Summary 2007 JavaOneSM Conference | Session TS-7820 | 4 Apache Harmony In the Beginning May 2005—founded in the Apache Incubator Primary Goals 1. Compatible, independent implementation of Java™ Platform, Standard Edition (Java SE platform) under the Apache License 2. Community-developed, modular architecture allowing sharing and independent innovation 3. Protect IP rights of ecosystem 2007 JavaOneSM Conference | Session TS-7820 | 5 Apache Harmony Early history: 2005 Broad community discussion • Technical issues • Legal and IP issues • Project governance issues Goal: Consolidation and Consensus 2007 JavaOneSM Conference | Session TS-7820 | 6 Early History Early history: 2005/2006 Initial Code Contributions • Three Virtual machines ● JCHEVM, BootVM, DRLVM • Class Libraries ● Core classes, VM interface, test cases ● Security, beans, regex, Swing, AWT ● RMI and math 2007 JavaOneSM Conference | Session TS-7820 | -

Feasibility of Optimizations Requiring Bounded Treewidth in a Data Flow Centric Intermediate Representation
Feasibility of Optimizations Requiring Bounded Treewidth in a Data Flow Centric Intermediate Representation Sigve Sjømæling Nordgaard and Jan Christian Meyer Department of Computer Science, NTNU Trondheim, Norway Abstract Data flow analyses are instrumental to effective compiler optimizations, and are typically implemented by extracting implicit data flow information from traversals of a control flow graph intermediate representation. The Regionalized Value State Dependence Graph is an alternative intermediate representation, which represents a program in terms of its data flow dependencies, leaving control flow implicit. Several analyses that enable compiler optimizations reduce to NP-Complete graph problems in general, but admit linear time solutions if the graph’s treewidth is limited. In this paper, we investigate the treewidth of application benchmarks and synthetic programs, in order to identify program features which cause the treewidth of its data flow graph to increase, and assess how they may appear in practical software. We find that increasing numbers of live variables cause unbounded growth in data flow graph treewidth, but this can ordinarily be remedied by modular program design, and monolithic programs that exceed a given bound can be efficiently detected using an approximate treewidth heuristic. 1 Introduction Effective program optimizations depend on an intermediate representation that permits a compiler to analyze the data and control flow semantics of the source program, so as to enable transformations without altering the result. The information from analyses such as live variables, available expressions, and reaching definitions pertains to data flow. The classical method to obtain it is to iteratively traverse a control flow graph, where program execution paths are explicitly encoded and data movement is implicit. -

Iterative-Free Program Analysis
Iterative-Free Program Analysis Mizuhito Ogawa†∗ Zhenjiang Hu‡∗ Isao Sasano† [email protected] [email protected] [email protected] †Japan Advanced Institute of Science and Technology, ‡The University of Tokyo, and ∗Japan Science and Technology Corporation, PRESTO Abstract 1 Introduction Program analysis is the heart of modern compilers. Most control Program analysis is the heart of modern compilers. Most control flow analyses are reduced to the problem of finding a fixed point flow analyses are reduced to the problem of finding a fixed point in a in a certain transition system, and such fixed point is commonly certain transition system. Ordinary method to compute a fixed point computed through an iterative procedure that repeats tracing until is an iterative procedure that repeats tracing until convergence. convergence. Our starting observation is that most programs (without spaghetti This paper proposes a new method to analyze programs through re- GOTO) have quite well-structured control flow graphs. This fact cursive graph traversals instead of iterative procedures, based on is formally characterized in terms of tree width of a graph [25]. the fact that most programs (without spaghetti GOTO) have well- Thorup showed that control flow graphs of GOTO-free C programs structured control flow graphs, graphs with bounded tree width. have tree width at most 6 [33], and recent empirical study shows Our main techniques are; an algebraic construction of a control that control flow graphs of most Java programs have tree width at flow graph, called SP Term, which enables control flow analysis most 3 (though in general it can be arbitrary large) [16]. -

Generalized Escape Analysis and Lightweight Continuations
Generalized Escape Analysis and Lightweight Continuations Abstract Might and Shivers have published two distinct analyses for rea- ∆CFA and ΓCFA are two analysis techniques for higher-order soning about programs written in higher-order languages that pro- functional languages (Might and Shivers 2006b,a). The former uses vide first-class continuations, ∆CFA and ΓCFA (Might and Shivers an enrichment of Harrison’s procedure strings (Harrison 1989) to 2006a,b). ∆CFA is an abstract interpretation based on a variation reason about control-, environment- and data-flow in a program of procedure strings as developed by Sharir and Pnueli (Sharir and represented in CPS form; the latter tracks the degree of approxi- Pnueli 1981), and, most proximately, Harrison (Harrison 1989). mation inflicted by a flow analysis on environment structure, per- Might and Shivers have applied ∆CFA to problems that require mitting the analysis to exploit extra precision implicit in the flow reasoning about the environment structure relating two code points lattice, which improves not only the precision of the analysis, but in a program. ΓCFA is a general tool for “sharpening” the precision often its run-time as well. of an abstract interpretation by tracking the amount of abstraction In this paper, we integrate these two mechanisms, showing how the analysis has introduced for the specific abstract interpretation ΓCFA’s abstract counting and collection yields extra precision in being performed. This permits the analysis to opportunistically ex- ∆CFA’s frame-string model, exploiting the group-theoretic struc- ploit cases where the abstraction has introduced no true approxi- ture of frame strings. mation. -

Escape from Escape Analysis of Golang
Escape from Escape Analysis of Golang Cong Wang Mingrui Zhang Yu Jiang∗ KLISS, BNRist, School of Software, KLISS, BNRist, School of Software, KLISS, BNRist, School of Software, Tsinghua University Tsinghua University Tsinghua University Beijing, China Beijing, China Beijing, China Huafeng Zhang Zhenchang Xing Ming Gu Compiler and Programming College of Engineering and Computer KLISS, BNRist, School of Software, Language Lab, Huawei Technologies Science, ANU Tsinghua University Hangzhou, China Canberra, Australia Beijing, China ABSTRACT KEYWORDS Escape analysis is widely used to determine the scope of variables, escape analysis, memory optimization, code generation, go pro- and is an effective way to optimize memory usage. However, the gramming language escape analysis algorithm can hardly reach 100% accurate, mistakes ACM Reference Format: of which can lead to a waste of heap memory. It is challenging to Cong Wang, Mingrui Zhang, Yu Jiang, Huafeng Zhang, Zhenchang Xing, ensure the correctness of programs for memory optimization. and Ming Gu. 2020. Escape from Escape Analysis of Golang. In Software In this paper, we propose an escape analysis optimization ap- Engineering in Practice (ICSE-SEIP ’20), May 23–29, 2020, Seoul, Republic of proach for Go programming language (Golang), aiming to save Korea. ACM, New York, NY, USA, 10 pages. https://doi.org/10.1145/3377813. heap memory usage of programs. First, we compile the source code 3381368 to capture information of escaped variables. Then, we change the code so that some of these variables can bypass Golang’s escape 1 INTRODUCTION analysis mechanism, thereby saving heap memory usage and reduc- Memory management is very important for software engineering. -

Escape Analysis for Java
Escape Analysis for Java Jong-Deok Choi Manish Gupta Mauricio Serrano Vugranam C. Sreedhar Sam Midkiff IBM T. J. Watson Research Center P. O. Box 218, Yorktown Heights, NY 10598 jdchoi, mgupta, mserrano, vugranam, smidkiff ¡ @us.ibm.com ¢¤£¦¥¨§ © ¦ § § © § This paper presents a simple and efficient data flow algorithm Java continues to gain importance as a language for general- for escape analysis of objects in Java programs to determine purpose computing and for server applications. Performance (i) if an object can be allocated on the stack; (ii) if an object is an important issue in these application environments. In is accessed only by a single thread during its lifetime, so that Java, each object is allocated on the heap and can be deallo- synchronization operations on that object can be removed. We cated only by garbage collection. Each object has a lock asso- introduce a new program abstraction for escape analysis, the ciated with it, which is used to ensure mutual exclusion when connection graph, that is used to establish reachability rela- a synchronized method or statement is invoked on the object. tionships between objects and object references. We show that Both heap allocation and synchronization on locks incur per- the connection graph can be summarized for each method such formance overhead. In this paper, we present escape analy- that the same summary information may be used effectively in sis in the context of Java for determining whether an object (1) different calling contexts. We present an interprocedural al- may escape the method (i.e., is not local to the method) that gorithm that uses the above property to efficiently compute created the object, and (2) may escape the thread that created the connection graph and identify the non-escaping objects for the object (i.e., other threads may access the object). -

Oracle Lifetime Support Policy for Oracle Fusion Middleware Guide
ORACLE INFORMATION-DRIVEN SUPPORT Oracle Lifetime Support Policy Oracle Fusion Middleware Oracle Fusion Middleware 8 Oracle Fusion Middleware Releases 8 Application Development Tools 9 Oracle’s Application Development Tools 9 Oracle’s GraalVM Enterprise Releases 9 Oracle Cloud Application Foundation Releases 10 Oracle’s Sun and Glassfish Application Server Releases 12 Oracle’s Java Releases 13 Oracle’s Sun JDK Releases 13 Oracle’s Blockchain Platform Releases 14 Business Intelligence 14 Oracle Business Intelligence EE Releases 14 Oracle’s HyperRoll Releases 21 Oracle’s Siebel Technology Releases 22 Oracle’s Siebel Applications Releases 22 Oracle Big Data Discovery Releases 23 Oracle Endeca Information Discovery Releases 23 Oracle’s Endeca Releases 25 Master Data Management and Data Integrator 26 Oracle’s GoldenGate Releases 26 Oracle Data Integrator Releases 28 Oracle Data Integrator (Formerly Sunopsis) Releases 28 Oracle’s Sun Master Data Management and Data Integrator Releases 28 Oracle’s Silver Creek and EDQP Releases 29 Oracle's Datanomic and EDQ Releases 30 Oracle WebCenter Portal Releases 31 Oracle’s Sun Portal Releases 32 Oracle WebCenter Content Releases 32 Oracle’s Stellent Releases (Enterprise Content Management) 34 Oracle’s Captovation Releases (Enterprise Content Management) 35 Oracle WebCenter Sites Releases 36 Oracle FatWire Releases (WebCenter Sites) 36 Oracle Identity and Access Management Releases 37 Oracle’s Bharosa Releases 40 Oracle’s Passlogix Releases 41 Oracle’s Bridgestream Releases 41 Oracle’s Oblix Releases 42 -

Making Collection Operations Optimal with Aggressive JIT Compilation
Making Collection Operations Optimal with Aggressive JIT Compilation Aleksandar Prokopec David Leopoldseder Oracle Labs Johannes Kepler University, Linz Switzerland Austria [email protected] [email protected] Gilles Duboscq Thomas Würthinger Oracle Labs Oracle Labs Switzerland Switzerland [email protected] [email protected] Abstract 1 Introduction Functional collection combinators are a neat and widely ac- Compilers for most high-level languages, such as Scala, trans- cepted data processing abstraction. However, their generic form the source program into an intermediate representa- nature results in high abstraction overheads – Scala collec- tion. This intermediate program representation is executed tions are known to be notoriously slow for typical tasks. We by the runtime system. Typically, the runtime contains a show that proper optimizations in a JIT compiler can widely just-in-time (JIT) compiler, which compiles the intermediate eliminate overheads imposed by these abstractions. Using representation into machine code. Although JIT compilers the open-source Graal JIT compiler, we achieve speedups of focus on optimizations, there are generally no guarantees up to 20× on collection workloads compared to the standard about the program patterns that result in fast machine code HotSpot C2 compiler. Consequently, a sufficiently aggressive – most optimizations emerge organically, as a response to JIT compiler allows the language compiler, such as Scalac, a particular programming paradigm in the high-level lan- to focus on other concerns. guage. Scala’s functional-style collection combinators are a In this paper, we show how optimizations, such as inlin- paradigm that the JVM runtime was unprepared for. ing, polymorphic inlining, and partial escape analysis, are Historically, Scala collections [Odersky and Moors 2009; combined in Graal to produce collections code that is optimal Prokopec et al. -

Thread Scheduling in Multi-Core Operating Systems Redha Gouicem
Thread Scheduling in Multi-core Operating Systems Redha Gouicem To cite this version: Redha Gouicem. Thread Scheduling in Multi-core Operating Systems. Computer Science [cs]. Sor- bonne Université, 2020. English. tel-02977242 HAL Id: tel-02977242 https://hal.archives-ouvertes.fr/tel-02977242 Submitted on 24 Oct 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Ph.D thesis in Computer Science Thread Scheduling in Multi-core Operating Systems How to Understand, Improve and Fix your Scheduler Redha GOUICEM Sorbonne Université Laboratoire d’Informatique de Paris 6 Inria Whisper Team PH.D.DEFENSE: 23 October 2020, Paris, France JURYMEMBERS: Mr. Pascal Felber, Full Professor, Université de Neuchâtel Reviewer Mr. Vivien Quéma, Full Professor, Grenoble INP (ENSIMAG) Reviewer Mr. Rachid Guerraoui, Full Professor, École Polytechnique Fédérale de Lausanne Examiner Ms. Karine Heydemann, Associate Professor, Sorbonne Université Examiner Mr. Etienne Rivière, Full Professor, University of Louvain Examiner Mr. Gilles Muller, Senior Research Scientist, Inria Advisor Mr. Julien Sopena, Associate Professor, Sorbonne Université Advisor ABSTRACT In this thesis, we address the problem of schedulers for multi-core architectures from several perspectives: design (simplicity and correct- ness), performance improvement and the development of application- specific schedulers.