Coriolis Force-Based Instability of a Shear-Thinning Microchannel Flow Saunak Sengupta 1, Sukhendu Ghosh 2, and Suman Chakraborty 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Secondary Flow Effects on Deposition of Cohesive Sediment in A
water Article Secondary Flow Effects on Deposition of Cohesive Sediment in a Meandering Reach of Yangtze River Cuicui Qin 1,* , Xuejun Shao 1 and Yi Xiao 2 1 State Key Laboratory of Hydroscience and Engineering, Tsinghua University, Beijing 100084, China 2 National Inland Waterway Regulation Engineering Research Center, Chongqing Jiaotong University, Chongqing 400074, China * Correspondence: [email protected]; Tel.: +86-188-1137-0675 Received: 27 May 2019; Accepted: 9 July 2019; Published: 12 July 2019 Abstract: Few researches focus on secondary flow effects on bed deformation caused by cohesive sediment deposition in meandering channels of field mega scale. A 2D depth-averaged model is improved by incorporating three submodels to consider different effects of secondary flow and a module for cohesive sediment transport. These models are applied to a meandering reach of Yangtze River to investigate secondary flow effects on cohesive sediment deposition, and a preferable submodel is selected based on the flow simulation results. Sediment simulation results indicate that the improved model predictions are in better agreement with the measurements in planar distribution of deposition, as the increased sediment deposits caused by secondary current on the convex bank have been well predicted. Secondary flow effects on the predicted amount of deposition become more obvious during the period when the sediment load is low and velocity redistribution induced by the bed topography is evident. Such effects vary with the settling velocity and critical shear stress for deposition of cohesive sediment. The bed topography effects can be reflected by the secondary flow submodels and play an important role in velocity and sediment deposition predictions. -

Download This Article in PDF Format
A&A 444, 25–44 (2005) Astronomy DOI: 10.1051/0004-6361:20053683 & c ESO 2005 Astrophysics On the relevance of subcritical hydrodynamic turbulence to accretion disk transport G. Lesur and P.-Y. Longaretti Laboratoire d’Astrophysique, Observatoire de Grenoble, BP 53, 38041 Grenoble Cedex 9, France e-mail: [geoffroy.lesur;pierre-yves.longaretti]@obs.ujf-grenoble.fr Received 22 June 2005 / Accepted 13 September 2005 ABSTRACT Hydrodynamic unstratified Keplerian flows are known to be linearly stable at all Reynolds numbers, but may nevertheless become turbulent through nonlinear mechanisms. However, in the last ten years, conflicting points of view have appeared on this issue. We have revisited the problem through numerical simulations in the shearing sheet limit. It turns out that the effect of the Coriolis force in stabilizing the flow depends on whether the flow is cyclonic (cooperating shear and rotation vorticities) or anticyclonic (competing shear and rotation vorticities); Keplerian flows are anticyclonic. We have obtained the following results: i/ The Coriolis force does not quench turbulence in subcritical flows; however, turbulence is more efficient, and much more easily found, in cyclonic flows than in anticyclonic ones. ii/ The Reynolds number/rotation/resolution relation has been quantified in this problem. In particular we find that the resolution demand, when moving away from the marginal stability boundary, is much more severe for anticyclonic flows than for cyclonic ones. Presently available computer resources do not allow numerical codes to reach the Keplerian regime. iii/ The efficiency of turbulent transport is directly correlated to the Reynolds number of transition to turbulence Rg, in such a way that the Shakura-Sunyaev parameter α ∼ 1/Rg. -

Simplified Spectral Model of 3D Meander Flow
water Article Simplified Spectral Model of 3D Meander Flow Fei Yang, Yuanjian Wang * and Enhui Jiang * Yellow River Institute of Hydraulic Research, Yellow River Conservancy Commission, Zhengzhou 450003, China; [email protected] * Correspondence: [email protected] (Y.W.); [email protected] (E.J.) Abstract: Most 2D (two-dimensional) models either take vertical velocity profiles as uniform, or consider secondary flow in momentum equations with presupposed velocity profiles, which weakly reflect the spatio-temporal characteristics of meander flow. To tackle meander flow in a more accurate 3D (three-dimensional) way while avoiding low computational efficiency, a new 3D model based on spectral methods is established and verified in this paper. In the present model, the vertical water flow field is expanded into polynomials. Governing equations are transformed by the Galerkin method and then advection terms are tackled with a semi-Lagrangian method. The simulated flow structures of an open channel bend are then compared with experimental results. Although a zero-equation turbulence model is used in this new 3D model, it shows reasonable flow structures, and calculation efficiency is comparable to a depth-averaged 2D model. Keywords: spectral method; 3D model; depth-averaged 2D model; meander flow; secondary flow 1. Introduction A meandering channel pattern is the most common fluvial channel type, and numer- Citation: Yang, F.; Wang, Y.; Jiang, E. ical simulation concerning meander flow is an efficient technology to analyze hydrody- Simplified Spectral Model of 3D namic processes with sediment transport and morphological evolution. The secondary Meander Flow. Water 2021, 13, 1228. flow (Prandtl’s first kind of secondary flow, or helical secondary flow) at the bend cross https://doi.org/10.3390/w13091228 section generates transversal momentum transport from inner bank to outer bank [1], as a result of the local imbalance of the centrifugal force induced by flow curvatures and the Academic Editor: transversal pressure gradient. -
MMV211 Fluid Mechanics LABORATION 2A Pipe Flow Systems
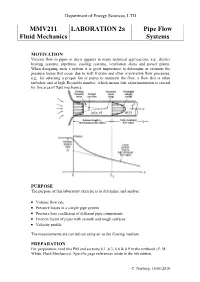
Department of Energy Sciences, LTH MMV211 LABORATION 2a Pipe Flow Fluid Mechanics Systems MOTIVATION Viscous flow in pipes or ducts appears in many technical applications, e.g., district heating systems, pipelines, cooling systems, ventilation ducts and power plants. When designing such a system it is great importance to determine or estimate the pressure losses that occur due to wall friction and other irreversible flow processes, e.g., for selecting a proper fan or pump to maintain the flow, a flow that is often turbulent and at high Reynolds number, which means that experimentation is crucial for this area of fluid mechanics. PURPOSE The purpose of this laboratory exercise is to determine and analyse • Volume flow rate • Pressure losses in a simple pipe system • Pressure loss coefficient of different pipe components • Friction factor of pipes with smooth and rough surfaces • Velocity profile The measurements are carried out using air as the flowing medium. PREPARATION For preparation; read this PM and sections 6.1, 6.3, 6.6 & 6.9 in the textbook (F. M. White, Fluid Mechanics). Specific page references relate to the 6th edition. C. Norberg, 16/01/2010 2 1. THEORETICAL 1.1 Velocity profiles Assume a fluid that flows through a pipe of constant cross-sectional area A. Further assume that the flow is fully developed, stationary and incompressible, ρ = const. Stationary conditions means that the mass flow rate m& is constant. Since the fluid density ρ is constant that goes also for the volume flow rate, Q= m& / ρ = VA= const., where V is the mean velocity. -

Influence of Coriolis Force Upon Bottom Boundary Layers in a Large
This is a repository copy of Influence of Coriolis Force Upon Bottom Boundary Layers in a Large‐ Scale Gravity Current Experiment: Implications for Evolution of Sinuous Deep‐ Water Channel Systems. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/159723/ Version: Published Version Article: Davarpanah Jazi, S, Wells, MG, Peakall, J orcid.org/0000-0003-3382-4578 et al. (7 more authors) (2020) Influence of Coriolis Force Upon Bottom Boundary Layers in a Large‐ Scale Gravity Current Experiment: Implications for Evolution of Sinuous Deep‐ Water Channel Systems. Journal of Geophysical Research: Oceans, 125 (3). e2019JC015284. ISSN 2169-9291 https://doi.org/10.1029/2019jc015284 ©2020. American Geophysical Union. Uploaded in accordance with the publisher's self-archiving policy. Reuse Items deposited in White Rose Research Online are protected by copyright, with all rights reserved unless indicated otherwise. They may be downloaded and/or printed for private study, or other acts as permitted by national copyright laws. The publisher or other rights holders may allow further reproduction and re-use of the full text version. This is indicated by the licence information on the White Rose Research Online record for the item. Takedown If you consider content in White Rose Research Online to be in breach of UK law, please notify us by emailing [email protected] including the URL of the record and the reason for the withdrawal request. [email protected] https://eprints.whiterose.ac.uk/ RESEARCH ARTICLE Influence of Coriolis Force Upon Bottom Boundary Layers 10.1029/2019JC015284 in a Large‐Scale Gravity Current Experiment: Implications Key Points: ‐ • A large 13‐m rotating flume is used for Evolution of Sinuous Deep Water Channel Systems to study Ekman boundary layers S. -

Dynamics of Nonmigrating Mid-Channel Bar and Superimposed Dunes in a Sandy-Gravelly River (Loire River, France)
Geomorphology 248 (2015) 185–204 Contents lists available at ScienceDirect Geomorphology journal homepage: www.elsevier.com/locate/geomorph Dynamics of nonmigrating mid-channel bar and superimposed dunes in a sandy-gravelly river (Loire River, France) Coraline L. Wintenberger a, Stéphane Rodrigues a,⁎, Nicolas Claude b, Philippe Jugé c, Jean-Gabriel Bréhéret a, Marc Villar d a Université François Rabelais de Tours, E.A. 6293 GéHCO, GéoHydrosystèmes Continentaux, Faculté des Sciences et Techniques, Parc de Grandmont, 37200 Tours, France b Université Paris-Est, Laboratoire d'hydraulique Saint-Venant, ENPC, EDF R&D, CETMEF, 78 400 Chatou, France c Université François Rabelais — Tours, CETU ELMIS, 11 quai Danton, 37 500 Chinon, France d INRA, UR 0588, Amélioration, Génétique et Physiologie Forestières, 2163 Avenue de la Pomme de Pin, CS 40001 Ardon, 45075 Orléans Cedex 2, France article info abstract Article history: A field study was carried out to investigate the dynamics during floods of a nonmigrating, mid-channel bar of the Received 11 February 2015 Loire River (France) forced by a riffle and renewed by fluvial management works. Interactions between the bar Received in revised form 17 July 2015 and superimposed dunes developed from an initial flat bed were analyzed during floods using frequent mono- Accepted 18 July 2015 and multibeam echosoundings, Acoustic Doppler Profiler measurements, and sediment grain-size analysis. Available online 4 August 2015 When water left the bar, terrestrial laser scanning and sediment sampling documented the effect of post-flood sediment reworking. Keywords: fl fi Sandy-gravelly rivers During oods a signi cant bar front elongation, spreading (on margins), and swelling was shown, whereas a sta- Nonmigrating (forced) bar ble area (no significant changes) was present close to the riffle. -

Hydro- and Morphodynamics in Curved River Reaches – Recent Results and Directions for Future Research
Adv. Geosci., 37, 19–25, 2013 Open Access www.adv-geosci.net/37/19/2013/ Advances in doi:10.5194/adgeo-37-19-2013 © Author(s) 2013. CC Attribution 3.0 License. Geosciences Hydro- and morphodynamics in curved river reaches – recent results and directions for future research K. Blanckaert1,4, G. Constantinescu2, W. Uijttewaal3, and Q. Chen1 1State Key Laboratory of Urban and Regional Ecology, Research Centre for Eco-Environmental Sciences, Chinese Academy of Sciences, Beijing, China 2Department of Civil and Environmental Engineering & IIHR-Hydroscience and Engineering, The University of Iowa, Iowa, USA 3Faculty of Civil Engineering and Geosciences, Delft University of Technology, Delft, the Netherlands 4Laboratory of Hydraulic Constructions, Ecole Polytechnique Fédérale Lausanne, Lausanne, Switzerland Correspondence to: K. Blanckaert (koen.blanckaert@epfl.ch) Received: 25 February 2013 – Revised: 1 May 2013 – Accepted: 3 June 2013 – Published: 17 December 2013 Abstract. Curved river reaches were investigated as an ex- engineering technique to modify the flow and the bed mor- ample of river configurations where three-dimensional pro- phology by means of an air-bubble screen. The rising air bub- cesses prevail. Similar processes occur, for example, in con- bles generate secondary flow, which redistributes the patterns fluences and bifurcations, or near hydraulic structures such as of flow, boundary shear stress and sediment transport. bridge piers and abutments. Some important processes were investigated in detail in the laboratory, simulated numerically by means of eddy-resolving techniques, and finally parame- terized in long-term and large-scale morphodynamic models. 1 Introduction Investigated flow processes include secondary flow, large- scale coherent turbulence structures, shear layers and flow This article summarizes recent experimental and numerical separation at the convex inner bank. -

Copyright © 1996 by ASME
from its high-pressure layer of the outlet toward its low-pressure The secondary vortices L and H in Fig. 14(b) correspond layer of the inlet. This axial flow is then a secondary backflow very well to those given in Figs. 15 and 16 over the outlet superimposed on the mean flow field: We have a strong section of the impeller. Then, the vortex L is a pressure "low" throughflow momentum wake in the core region of the vor centered on the throughflow momentum wake and the vortex tex "low." H is a pressure ' 'high'' centered on the throughflow momentum The vortex "high" is associated with a radial flow out of the jet, as given in Fig. 6. core, the same as the anticyclone. The axial flow through the core is directed from the low-pressure layer of the upper atmo References sphere toward the high-pressure layer on the ground. For the Chen, Y. N., Haupt, U„ and Rautenberg, M„ 1989, "The Vortex-Filament case of the impeller, this radial flow will come from the inlet Nature of Reverse Flow on the Verge of Rotating Stall," ASME JOURNAL OF through the core of the vortex "high" toward the outlet and TURBOMACHINERY, Vol. Ill, pp. 450-461. Chen, Y. N., Seidel, U„ Haupt, U„ and Rautenberg, M., 1991, "The Rossby spread out of it. We then have here a strong throughflow mo Waves of Rotating Stall in Impellers, Part II: Application of the Rossby-Wave mentum jet along of the vortex "high" superimposed on the Theory to Rotating Stall," Proceedings, 1991 Yokohama International Gas Tur mean flow field. -

Einstein's Tea Leaves and Pressure Systems in the Atmosphere
Einstein's Tea Leaves and Pressure Systems in the Atmosphere The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Tandon, Amit and John Marshall. “Einstein’s Tea Leaves and Pressure Systems in the Atmosphere.” The Physics Teacher 48, 5 (May 2010): 292–295 © 2010 American Association of Physics Teachers As Published http://dx.doi.org/10.1119/1.3393055 Publisher American Association of Physics Teachers (AAPT) Version Author's final manuscript Citable link http://hdl.handle.net/1721.1/118473 Terms of Use Creative Commons Attribution-Noncommercial-Share Alike Detailed Terms http://creativecommons.org/licenses/by-nc-sa/4.0/ Einstein’s Tea Leaves and Pressure Systems in the Atmosphere Amit Tandon, UMass Dartmouth, and John Marshall, MIT Tea leaves gather in the center of the cup when the tea is stirred. In 1926 Einstein1 explained the phenomenon in terms of a secondary, rim-to-center circulation caused by the fluid rubbing against the bottom of the cup. This explanation can be connected to air movement in atmospheric pressure systems to explore, for example, why low pressure systems tend to be stormy and high pressure systems are fair-weather. Here, following Einstein’s lead, we revisit the tea leaf phenomenon, make the connection with atmospheric pressure systems and describe an illustrative laboratory experiment. Tea Leaves in a Cup The following quote from Einstein’s 1926 article explains the phenomenon, “Imagine a flat- bottomed cup full of tea. At the bottom there are some tea leaves, which stay there because they are rather heavier than the liquid they have displaced. -

SECONDARY FLOWS in RIVER BENDS a Thesis Submitted to The
SECONDARY FLOWS IN RIVER BENDS A Thesis submitted to the University of London (Imperial College of Science and Technology) for the degree of Doctor of Philosophy in the Faculty of Engineering by Ahmad Faisal Asfari B.Sc.(Eng.) November 1968 2. ABSTRACT In this study on secondary flows in river bends, experimental investigations were carried out in three 1800 open channel bends of rectangular cross-sections, but of different curvatures, in order to examine the main features of the flow. The breadth : depth ratios, between 24 and 3, are thought to be larger than have previously been reported in laboratory experiments. The characteristics of the secondary currents were measured, both by finding velocity distributions, and also by finding the bed shear stress distribution. The measured velocity distributions in turbulent flow are then compared with those calculated by solving the general equations of motion by the method of finite differences. Velocities were determined in laminar flow by photo- graphing particles of neutral density, and in turbulent flow by using a miniature current meter. The spiral motions in a cross-section were observed photographically. The distribution of shear stress in both the radial and tangential directions on the bed were mapped,and a correlation between velocity and bed shear is suggested. The regions susceptible to the most serious effects 3. of the stream curvature are identified from the consideration of bed shear distribution, and these locations are related to channel curvature. These regions were further investigated by studying flows over loose beds, which were prepared by covering the rigid beds with an industrial sand. -
Secondary Circulation in Natural Streams
View metadata, citation and similar papers at core.ac.uk brought to you byCORE provided by Illinois Digital Environment for Access to Learning and Scholarship Repository UILU-WRC-86-200 RESEARCH REPORT 200 SECONDARY CIRCULATION IN NATURAL STREAMS BY MISGANAW DEMISSIE TA-WEI SOONG NANI G. BHOWMIK WILLIAM P. FITZPATRICK UNIVERSITY OF ILLINOIS ILLINOIS STATE WATER SURVEY AT URBANA-CHAMPAIGN WATER RESOURCES CENTER W. HALL C. MAXWELL DEPARTMENT OF CIVIL ENGINEERING JULY 1986 UNIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN PROJECT NO. G904-02 GRANT NUMBER INT 14-08-0001-G904 PROJECT COMPLETION REPORT TO U.S. DEPARTMENT OF THE INTERIOR WASHINGTON, D.C. 20240 WRC RESEARCH REPORT NO. 200 SECONDARY CIRCULATION IN NATURAL STREAMS by Misganaw Demissie, Ta-Wei Soong, Nani G. Bhowmik, and William P. Fitzpatrick Surface Water Section Illinois State Water Survey Champaign, Illinois 61820 and W. Hall C. Maxwell Department of Civil Engineering University of Illinois at Urbana-Champaign Urbana, Illinois 61801 The research on which this report is based was financed in part by the U.S. Department of the Interior, as authorized by the Water Research and Development Act of 1984. (P.L. 98-242). Project Completion Report Project No. G 904-02 Grant Number Int 14-08-0001-G904 July 1986 University of Illinois Water Resources Center Urbana, Illinois 61801 Contents of this publication do not necessarily reflect the views and policies of the U.S. Department of the Interior, nor does mention of trade names or commercial products constitute their endorsement by the U.S. Government. SECONDARY CIRCULATION IN NATURAL STREAMS ABSTRACT Secondary circulation which is sometimes referred to as secondary flow, secondary current or transverse current is an important phenomenon in natural streams and plays an important role in many natural processes in streams such as stream channel meander, bank erosion, bed scour, resuspension, and movement of sediment. -

A Review of Numerical Simulations of Secondary Flows in River Bends
water Review A Review of Numerical Simulations of Secondary Flows in River Bends Rawaa Shaheed 1,*, Abdolmajid Mohammadian 1 and Xiaohui Yan 2,* 1 Department of Civil Engineering, University of Ottawa, 161 Louis Pasteur, Ottawa, ON K1N 6N5, Canada; [email protected] 2 Department of Water Resources Engineering, Dalian University of Technology, Dalian 116024, China * Correspondence: [email protected] (R.S.); [email protected] (X.Y.) Abstract: River bends are one of the common elements in most natural rivers, and secondary flow is one of the most important flow features in the bends. The secondary flow is perpendicular to the main flow and has a helical path moving towards the outer bank at the upper part of the river cross-section, and towards the inner bank at the lower part of the river cross-section. The secondary flow causes a redistribution in the main flow. Accordingly, this redistribution and sediment transport by the secondary flow may lead to the formation of a typical pattern of river bend profile. It is important to study and understand the flow pattern in order to predict the profile and the position of the bend in the river. However, there are a lack of comprehensive reviews on the advances in numerical modeling of bend secondary flow in the literature. Therefore, this study comprehensively reviews the fundamentals of secondary flow, the governing equations and boundary conditions for numerical simulations, and previous numerical studies on river bend flows. Most importantly, it reviews various numerical simulation strategies and performance of various turbulence models in simulating the flow in river bends and concludes that the main problem is finding the appropriate Citation: Shaheed, R.; Mohammadian, model for each case of turbulent flow.