A Multidisciplinary Model for Using Robotics in Engineering Education
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
How to Start a Robotics Company REPORT
REPORT How to Start a Robotics Company TABLE OF CONTENTS FIRST, IDENTIFY A MARKET NEXT, BUILD A TEAM CRACKING THE VC CODE UP AND RUNNING FINAL WORDS OF ADVICE WHY ARE ROBOTICS COMPANIES DYING? roboticsbusinessreview.com 2 HOW TO START A ROBOTICS COMPANY Building robots are hard; building robot companies are even harder. Here are some tips and advice from those who’ve done it. By Neal Weinberg By all measures, there’s never been a better time to start a robotics About the author: company. Worldwide spending on robotics systems and drones will total $115.7 Neal Weinberg billion in 2019, an increase of 17.6% over 2018, according to IDC. By 2022, is a freelance IDC expects robotics-related spending to reach $210.3 billion, with a technology writer and editor, with compound annual growth rate of 20.2%. experience as Venture capital is flowing like it’s 1999 all over again. According to the a technology PwC/CB Insight MoneyTree Report for 2018, VC funding in the U.S. jumped business writer to $99.5 billion, the highest yearly funding level since the dotcom boom. for daily news- In the category of AI-related companies, which includes robotics, startups papers, and as a writer and editor raised $9.3 billion in 2018, a 72% increase compared to 2017. Nuro, a for technology Silicon Valley startup that is piloting a driverless delivery robot vehicle, publications such announced in February that it successfully raised an astounding $940 as Computer- million from SoftBank. world and Net- Stocks in robotics and AI are hot commodities. -

Claytronics - a Synthetic Reality D.Abhishekh, B.Ramakantha Reddy, Y.Vijaya Kumar, A.Basi Reddy
International Journal of Scientific & Engineering Research, Volume 4, Issue 3, March‐2013 ISSN 2229‐5518 Claytronics - A Synthetic Reality D.Abhishekh, B.Ramakantha Reddy, Y.Vijaya Kumar, A.Basi Reddy, Abstract— "Claytronics" is an emerging field of electronics concerning reconfigurable nanoscale robots ('claytronic atoms', or catoms) designed to form much larger scale machines or mechanisms. Also known as "programmable matter", the catoms will be sub-millimeter computers that will eventually have the ability to move around, communicate with each others, change color, and electrostatically connect to other catoms to form different shapes. Claytronics technology is currently being researched by Professor Seth Goldstein and Professor Todd C. Mowry at Carnegie Mellon University, which is where the term was coined. According to Carnegie Mellon's Synthetic Reality Project personnel, claytronics are described as "An ensemble of material that contains sufficient local computation, actuation, storage, energy, sensing, and communication" which can be programmed to form interesting dynamic shapes and configurations. Index Terms— programmable matter, nanoscale robots, catoms, atoms, electrostatically, LED, LATCH —————————— —————————— 1 INTRODUCTION magine the concept of "programmable matter" -- micro- or which are ringed by several electromagnets are able to move I nano-scale devices which can combine to form the shapes of around each other to form a variety of shapes. Containing ru- physical objects, reassembling themselves as we needed. An dimentary processors and drawing electricity from a board that ensemble of material called catoms that contains sufficient local they rest upon. So far only four catoms have been operated to- computation, actuation, storage, energy, sensing & communica- gether. The plan though is to have thousands of them moving tion which can be programmed to form interesting dynamic around each other to form whatever shape is desired and to shapes and configurations. -

Control in Robotics
Control in Robotics Mark W. Spong and Masayuki Fujita Introduction The interplay between robotics and control theory has a rich history extending back over half a century. We begin this section of the report by briefly reviewing the history of this interplay, focusing on fundamentals—how control theory has enabled solutions to fundamental problems in robotics and how problems in robotics have motivated the development of new control theory. We focus primarily on the early years, as the importance of new results often takes considerable time to be fully appreciated and to have an impact on practical applications. Progress in robotics has been especially rapid in the last decade or two, and the future continues to look bright. Robotics was dominated early on by the machine tool industry. As such, the early philosophy in the design of robots was to design mechanisms to be as stiff as possible with each axis (joint) controlled independently as a single-input/single-output (SISO) linear system. Point-to-point control enabled simple tasks such as materials transfer and spot welding. Continuous-path tracking enabled more complex tasks such as arc welding and spray painting. Sensing of the external environment was limited or nonexistent. Consideration of more advanced tasks such as assembly required regulation of contact forces and moments. Higher speed operation and higher payload-to-weight ratios required an increased understanding of the complex, interconnected nonlinear dynamics of robots. This requirement motivated the development of new theoretical results in nonlinear, robust, and adaptive control, which in turn enabled more sophisticated applications. Today, robot control systems are highly advanced with integrated force and vision systems. -

2.1: What Is Robotics? a Robot Is a Programmable Mechanical Device
2.1: What is Robotics? A robot is a programmable mechanical device that can perform tasks and interact with its environment, without the aid of human interaction. Robotics is the science and technology behind the design, manufacturing and application of robots. The word robot was coined by the Czech playwright Karel Capek in 1921. He wrote a play called “Rossum's Universal Robots” that was about a slave class of manufactured human-like servants and their struggle for freedom. The Czech word robota loosely means "compulsive servitude.” The word robotics was first used by the famous science fiction writer, Isaac Asimov, in 1941. 2.1: What is Robotics? Basic Components of a Robot The components of a robot are the body/frame, control system, manipulators, and drivetrain. Body/frame: The body or frame can be of any shape and size. Essentially, the body/frame provides the structure of the robot. Most people are comfortable with human-sized and shaped robots that they have seen in movies, but the majority of actual robots look nothing like humans. Typically, robots are designed more for function than appearance. Control System: The control system of a robot is equivalent to the central nervous system of a human. It coordinates and controls all aspects of the robot. Sensors provide feedback based on the robot’s surroundings, which is then sent to the Central Processing Unit (CPU). The CPU filters this information through the robot’s programming and makes decisions based on logic. The same can be done with a variety of inputs or human commands. -

Computer Engineering, Minor (Behrend) 1
Computer Engineering, Minor (Behrend) 1 COMPUTER ENGINEERING, MINOR (BEHREND) Requirements for a minor may be completed at any campus location offering the specified courses for the minor. Students may not change from a campus that offers their major to a campus that does not offer their major for the purpose of completing a minor. Program Description This program of study provides graduates with a strong background in computer engineering. Upon completion of the minor, graduates will have developed an understanding of the operation and design of computers. This objective is accomplished through a combination of classroom study, computer-related projects, and laboratory experience. Analysis and design of computer hardware and software systems are stressed. The program requires completion of mandatory courses in analog and digital circuits, microprocessors, transistor logic, and computer programming. Students complete the minor by selecting technical electives in computer hardware and software engineering. What is Computer Engineering? Computer engineering is the study of the design, analysis, and implementation of computer systems including processors, memory, embedded devices, and data communication systems for a wide range of application domains. It includes the study of digital systems, computer architecture, and computer networks. It encompasses many design activities spanning from designing individual logic components to designing complete computer systems composed of hardware, software, and hardware-software co-design. Computer engineering drives the development of new computing systems that enable the latest technologies impacting our everyday lives. You Might Like This Program If... • You want to add computing expertise to a more general engineering major program. • You enjoy working with both hardware and software.. -
Is EE Right for You?
Erik Jonsson School of Engggineering and The Un ivers ity o f Texas a t Da llas Computer Science Is EE Right for You? • “Toto, I have a feeling we’re not in Kansas anymore.” • Now that you are here, diii?id you make the right choice? • Electrical engineering is a challenging and satisfying profession. That does not mean it is easy. In fact, with the possible exceptions of medicine or law, it is the MOST difficult. • There are some things you need to consider if you really, really want to be an engineer. • We will consider a few today. EE 1202 Lecture #1 – Why Electrical Engineering? 1 © N. B. Dodge 01/12 Erik Jonsson School of Engggineering and The Un ivers ity o f Texas a t Da llas Computer Science Is EE Right for You (2)? • Why did you decide to be an electrical engineer? – Parents will pay for engineering education (it’s what they want). – You like math and science. – A relative is an engineer and you like him/her. – You want to challenge yourself, and engineering seems challenging. – You think you are creative and love technology. – You want to make a difference in society . EE 1202 Lecture #1 – Why Electrical Engineering? 2 © N. B. Dodge 01/12 Erik Jonsson School of Engggineering and The Un ivers ity o f Texas a t Da llas Computer Science The High School “Science Student” Problem • In high school, you were FAR above the average. – And you probably didn’t study too hard, right? • You liked science and math, and they weren’t terribly hard. -

Electrical Engineering Technology
Electrical Engineering Technology Electrical Engineering Program Accreditation The Electrical Engineering Technology program at Central Piedmont is accredited by the Engineering Technology Accreditation Commission Technology (TAC) of the Accreditation Board of Engineering and Technology (ABET). The Associate in Applied Science degree in Electrical Engineering How to Apply: Technology has been specifically designed to prepare individuals to Complete a Central Piedmont admissions application through Get become advanced technicians in the workforce. Started on the Central Piedmont website. Electrical Engineering Technicians (Associates degree holders) typically build, install, test, troubleshoot, repair, and modify developmental and Contact Information production electronic components, equipment, and systems such as For questions about the program or for assistance as a student in the industrial/computer controls, manufacturing systems, instrumentation program, contact faculty advising. The Electrical Engineering Technology systems, communication systems, and power electronic systems. program is in the Engineering Technology Division. For additional information, visit the Electrical Engineering Technology website or call the A broad-based core of courses ensures that students develop the skills Program Chair at 704.330.6773. necessary to perform entry-level tasks. Emphasis is placed on developing the ability to think critically, analyze, and troubleshoot electronic systems. General Education Requirements Beginning with electrical fundamentals, course work progressively ENG 111 Writing and Inquiry 3.0 introduces electronics, 2D Computer Aided Design (CAD), circuit Select one of the following: 3.0 simulation, solid-state fundamentals, digital concepts, instrumentation, C++ programming, microprocessors, programmable Logic Controllers ENG 112 Writing and Research in the Disciplines (PLCs). Other course work includes the study of various fields associated ENG 113 Literature-Based Research with the electrical/electronic industry. -
Computer Engineering
Suggested Course Plan for a UC Riverside Major in COMPUTER ENGINEERING Catalog Year: 2020 Fall Quarter Units Winter Quarter Units Spring Quarter Units To earn a B.S., you must complete all FIRST YEAR College and University requirements. For CS 010A 4 CS 010B 4 CS 010C 4 a complete list: catalog.ucr.edu. C++ Programming I C++ Programming II Intro to Data Struc. & Algorithms ENGLISH COMPOSITION* ENGL 001A 4 ENGL 001B 4 MATH 009C 4 A C or better is required in three quarters of Beginning Composition Intermediate Composition First Year Calculus English Composition courses to satisfy the ENGR 001G 1 MATH 009B 4 MATH/CS 011 4 graduation requirement. ENGR 180W fulfills Professional Dev. & Mentoring First Year Calculus Intro to Discrete Structures the third quarter of English Composition. MATH 009A 4 PHYS 040A 5 PHYS 040B 5 BREADTH REQUIREMENTS First Year Calculus Physics (Mechanics) Physics (Heat/Waves/Sound) For an approved list of Breadth courses: SECOND YEAR http://student.engr.ucr.edu/policies/req CS 061 4 CS 111 4 CS 100 4 uirements/breadth.html. Machine Org. & Assembly Lang. Prog. Discrete Structures Software Construction Humanities: (3 courses) EE 001A & EE 01LA 4 EE 001B 4 CS/EE 120B 4 A. World History: _________ Engineering Circuit Analysis I and Lab Engineering Circuit Analysis II and Lab Embedded Systems B. Fine Arts, Lit., Phil. or Rlst:_________ MATH 046 4 EE/CS 120A 5 EE 020 4 C. Human Persp. on Science:_________ Differential Equations Logic Design Linear Methods for Engr. Analysis Social Sciences: (3 courses) PHYS 040C 5 CHEM 001A/LA or ME 10 4 MATH 010A 4 A. -
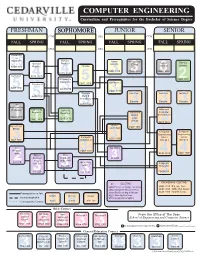
Computer Engineering
COMPUTER ENGINEERING Curriculum and Prerequisites for the Bachelor of Science Degree FRESHMAN SOPHOMORE JUNIOR SENIOR CUM GPA CUM FALL SPRING FALL SPRING FALL SPRING FALL SPRING SEM GPA SEM Chemistry for Engineers General Linear Professional Thermal General Physics II Systems Senior Ethics Systems 3.5CHEM 1050 Physics I Circuits Seminar EGEE 3110 EGGN 3110 EGGN 4010 PHYS 2120 3 Calculus I 0 PHYS 2110 3 . 4 4 Differential EGME 3170 Equations 2 EGEE5 2010 Electronics Calculus II I MATH 1710 MATH 2740 5 EGEE 3210H 3 Discrete Technical Technical Technical MATH 1720 Math & 3 5 Probability Elective Elective Elective The MATH 2520 3 3 3 Engingeering 3 Advanced Profession Engineering Statics & Computer Graphics Dynamics Advanced Digital Architecture EGGN 1110 Logic EGME 1810 EGME 2570 1 Design EGCP 4210 1 3. 3 Micro- Digital Logic EGCP 3010H Design controllers 3 Computer Computer Engineering Engineering Computer Senior Senior EGCP 2120 EGCP3 1010 Architecture 3 Design I Design II C++ Algorithms Program- EGCP 3210H ming 3 EGCP 4810 EGCP 4820 Object Data 4 4 Oriented Structures CS3 3410 Design using JAVA CS 1210 Operating 2 with C++ Computer 3CS 2210 Systems Networks 3CS 1220 3CS 3310 EGCP43103 ENGINEERING ELECTIVES CS ELECTIVES 3350 Found. of Comp. Security EGCP 4110 Dig. Sig. Proc. 3510 Compiler Theory & Prac EGCP 4250 CMOS VLSI Design EGCP 4410 Parallel Comp. Prerequisite on left 3610 Database Org & Design Credit Honors Course 4220 Web Applications Interchangeable 4710 Computer Graphics . Corequesite Course 3hours Hcourse with lab Bible Courses The Bible Old Testa- New Theology I Theology II FromFrom the the OfficeOffice ofof TheThe DeanChair and the ment Testament School ofThe Engineering Elmer W. -

History of Robotics: Timeline
History of Robotics: Timeline This history of robotics is intertwined with the histories of technology, science and the basic principle of progress. Technology used in computing, electricity, even pneumatics and hydraulics can all be considered a part of the history of robotics. The timeline presented is therefore far from complete. Robotics currently represents one of mankind’s greatest accomplishments and is the single greatest attempt of mankind to produce an artificial, sentient being. It is only in recent years that manufacturers are making robotics increasingly available and attainable to the general public. The focus of this timeline is to provide the reader with a general overview of robotics (with a focus more on mobile robots) and to give an appreciation for the inventors and innovators in this field who have helped robotics to become what it is today. RobotShop Distribution Inc., 2008 www.robotshop.ca www.robotshop.us Greek Times Some historians affirm that Talos, a giant creature written about in ancient greek literature, was a creature (either a man or a bull) made of bronze, given by Zeus to Europa. [6] According to one version of the myths he was created in Sardinia by Hephaestus on Zeus' command, who gave him to the Cretan king Minos. In another version Talos came to Crete with Zeus to watch over his love Europa, and Minos received him as a gift from her. There are suppositions that his name Talos in the old Cretan language meant the "Sun" and that Zeus was known in Crete by the similar name of Zeus Tallaios. -

Electrical and Computer Engineering: Past, Present, and Future
Electrical and Computer Engineering: Past, Present, and Future Randy Berry1, chair, Department of Electrical and Computer Engineering The field of electrical and computer engineering (ECE) has had an enormously successful history. This field has pushed the frontiers of fundamental research, led to the emergence of entirely new disciplines, and revolutionized our daily lives. ECE departments2 are found in nearly every engineering school and have historically been one of the larger departments both in terms of faculty and student enrollments. Academically, a strong ECE department is highly correlated with the reputation of an engineering school. Of the top 10 engineering schools in the latest US News and World Report rankings of graduate programs, nine have top 10 ranked ECE programs. Nevertheless, ECE is a field that finds itself facing challenges. In this paper, we will look to the field’s past issues and note how the field repeatedly reinvented itself to push to new heights. Finally, we argue that the time is ripe for another reinvention and show how aspects of such a reinvention are already emerging. Areas such as machine learning and data science, the Internet of things, and quantum information systems provide promising directions for ECE — and embracing them provides a path to a bright future. The Present Situation In many ways, ECE is a victim of its own successes. Advances such as computer-aided design tools reduce the number of designers needed. The increased integration reflected in Moore’s law means that more functionality can be integrated into a single integrated circuit (IC), replacing the need for engineering to integrate multiple components in custom designs. -

Chapter 4 China's High-Tech Development
CHAPTER 4 CHINA’S HIGH-TECH DEVELOPMENT SECTION 1: CHINA’S PURSUIT OF DOMINANCE IN COMPUTING, ROBOTICS, AND BIOTECHNOLOGY Key Findings • China has laid out an ambitious whole-of-government plan to achieve dominance in advanced technology. This state-led ap- proach utilizes government financing and regulations, high market access and investment barriers for foreign firms, over- seas acquisitions and talent recruitment, and, in some cases, industrial espionage to create globally competitive firms. • China’s close integration of civilian and military technology de- velopment raises concerns that technology, expertise, and intel- lectual property shared by U.S. firms with Chinese commercial partners could be transferred to China’s military. • Artificialintelligence: China—led by Baidu—is now on par with the United States in artificial intelligence due in part to robust Chinese government support, establishment of research insti- tutes in the United States, recruitment of U.S.-based talent, investment in U.S. artificial intelligence-related startups and firms, and commercial and academic partnerships. • Quantum information science: China has closed the technolog- ical gap with the United States in quantum information sci- ence—a sector the United States has long dominated—due to a concerted strategy by the Chinese government and inconsistent and unstable levels of R&D funding and limited government coordination by the United States. • High performance computing: Through multilevel government support, China now has the world’s two fastest supercomputers and is on track to surpass the United States in the next gener- ation of supercomputers—exascale computers—with an expect- ed rollout by 2020 compared to the accelerated U.S.