9 Stresses: Beams in Bending
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

10-1 CHAPTER 10 DEFORMATION 10.1 Stress-Strain Diagrams And
EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academy CHAPTER 10 DEFORMATION 10.1 Stress-Strain Diagrams and Material Behavior 10.2 Material Characteristics 10.3 Elastic-Plastic Response of Metals 10.4 True stress and strain measures 10.5 Yielding of a Ductile Metal under a General Stress State - Mises Yield Condition. 10.6 Maximum shear stress condition 10.7 Creep Consider the bar in figure 1 subjected to a simple tension loading F. Figure 1: Bar in Tension Engineering Stress () is the quotient of load (F) and area (A). The units of stress are normally pounds per square inch (psi). = F A where: is the stress (psi) F is the force that is loading the object (lb) A is the cross sectional area of the object (in2) When stress is applied to a material, the material will deform. Elongation is defined as the difference between loaded and unloaded length ∆푙 = L - Lo where: ∆푙 is the elongation (ft) L is the loaded length of the cable (ft) Lo is the unloaded (original) length of the cable (ft) 10-1 EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academy Strain is the concept used to compare the elongation of a material to its original, undeformed length. Strain () is the quotient of elongation (e) and original length (L0). Engineering Strain has no units but is often given the units of in/in or ft/ft. ∆푙 휀 = 퐿 where: is the strain in the cable (ft/ft) ∆푙 is the elongation (ft) Lo is the unloaded (original) length of the cable (ft) Example Find the strain in a 75 foot cable experiencing an elongation of one inch. -

Glossary: Definitions
Appendix B Glossary: Definitions The definitions given here apply to the terminology used throughout this book. Some of the terms may be defined differently by other authors; when this is the case, alternative terminology is noted. When two or more terms with identical or similar meaning are in general acceptance, they are given in the order of preference of the current writers. Allowable stress (working stress): If a member is so designed that the maximum stress as calculated for the expected conditions of service is less than some limiting value, the member will have a proper margin of security against damage or failure. This limiting value is the allowable stress subject to the material and condition of service in question. The allowable stress is made less than the damaging stress because of uncertainty as to the conditions of service, nonuniformity of material, and inaccuracy of the stress analysis (see Ref. 1). The margin between the allowable stress and the damaging stress may be reduced in proportion to the certainty with which the conditions of the service are known, the intrinsic reliability of the material, the accuracy with which the stress produced by the loading can be calculated, and the degree to which failure is unattended by danger or loss. (Compare with Damaging stress; Factor of safety; Factor of utilization; Margin of safety. See Refs. l–3.) Apparent elastic limit (useful limit point): The stress at which the rate of change of strain with respect to stress is 50% greater than at zero stress. It is more definitely determinable from the stress–strain diagram than is the proportional limit, and is useful for comparing materials of the same general class. -

DEFINITIONS Beams and Stringers (B&S) Beams and Stringers Are
DEFINITIONS Beams and Stringers (B&S) Beams and stringers are primary longitudinal support members, usually rectangular pieces that are 5.0 or more in. thick, with a depth more than 2.0 in. greater than the thickness. B&S are graded primarily for use as beams, with loads applied to the narrow face. Bent. A type of pier consisting of two or more columns or column-like components connected at their top ends by a cap, strut, or other component holding them in their correct positions. Camber. The convex curvature of a beam, typically used in glulam beams. Cantilever. A horizontal member fixed at one end and free at the other. Cap. A sawn lumber or glulam component placed horizontally on an abutment or pier to distribute the live load and dead load of the superstructure. Clear Span. Inside distance between the faces of support. Connector. Synonym for fastener. Crib. A structure consisting of a foundation grillage and a framework providing compartments that are filled with gravel, stones, or other material satisfactory for supporting the structure to be placed thereon. Check. A lengthwise separation of the wood that usually extends across the rings of annual growth and commonly results from stresses set up in wood during seasoning. Creep. Time dependent deformation of a wood member under sustained load. Dead Load. The structure’s self weight. Decay. The decomposition of wood substance by fungi. Some people refer to it as “rot”. Decking. A subcategory of dimension lumber, graded primarily for use with the wide face placed flatwise. Delamination. The separation of layers in laminated wood or plywood because of failure of the adhesive, either within the adhesive itself or at the interface between the adhesive and the adhered. -

Beam Structures and Internal Forces
ENDS 231 Note Set 13 S2008abn Beam Structures and Internal Forces • BEAMS - Important type of structural members (floors, bridges, roofs) - Usually long, straight and rectangular - Have loads that are usually perpendicular applied at points along the length Internal Forces 2 • Internal forces are those that hold the parts of the member together for equilibrium - Truss members: F A B F F A F′ F′ B F - For any member: T´ F = internal axial force (perpendicular to cut across section) V = internal shear force T´ (parallel to cut across section) T M = internal bending moment V Support Conditions & Loading V • Most often loads are perpendicular to the beam and cause only internal shear forces and bending moments M • Knowing the internal forces and moments is necessary when R designing beam size & shape to resist those loads • Types of loads - Concentrated – single load, single moment - Distributed – loading spread over a distance, uniform or non-uniform. 1 ENDS 231 Note Set 13 S2008abn • Types of supports - Statically determinate: simply supported, cantilever, overhang L (number of unknowns < number of equilibrium equations) Propped - Statically indeterminate: continuous, fixed-roller, fixed-fixed (number of unknowns < number of equilibrium equations) L Sign Conventions for Internal Shear and Bending Moment Restrained (different from statics and truss members!) V When ∑Fy **excluding V** on the left hand side (LHS) section is positive, V will direct down and is considered POSITIVE. M When ∑M **excluding M** about the cut on the left hand side (LHS) section causes a smile which could hold water (curl upward), M will be counter clockwise (+) and is considered POSITIVE. -

Foundations of Continuum Mechanics
Foundations of Continuum Mechanics • Concerned with material bodies (solids and fluids) which can change shape when loaded, and view is taken that bodies are continuous bodies. • Commonly known that matter is made up of discrete particles, and only known continuum is empty space. • Experience has shown that descriptions based on continuum modeling is useful, provided only that variation of field quantities on the scale of deformation mechanism is small in some sense. Goal of continuum mechanics is to solve BVP. The main steps are 1. Mathematical preliminaries (Tensor theory) 2. Kinematics 3. Balance laws and field equations 4. Constitutive laws (models) Mathematical structure adopted to ensure that results are coordinate invariant and observer invariant and are consistent with material symmetries. Vector and Tensor Theory Most tensors of interest in continuum mechanics are one of the following type: 1. Symmetric – have 3 real eigenvalues and orthogonal eigenvectors (eg. Stress) 2. Skew-Symmetric – is like a vector, has an associated axial vector (eg. Spin) 3. Orthogonal – describes a transformation of basis (eg. Rotation matrix) → 3 3 3 u = ∑uiei = uiei T = ∑∑Tijei ⊗ e j = Tijei ⊗ e j i=1 ~ ij==1 1 When the basis ei is changed, the components of tensors and vectors transform in a specific way. Certain quantities remain invariant – eg. trace, determinant. Gradient of an nth order tensor is a tensor of order n+1 and divergence of an nth order tensor is a tensor of order n-1. ∂ui ∂ui ∂Tij ∇ ⋅u = ∇ ⊗ u = ei ⊗ e j ∇ ⋅ T = e j ∂xi ∂x j ∂xi Integral (divergence) Theorems: T ∫∫RR∇ ⋅u dv = ∂ u⋅n da ∫∫RR∇ ⊗ u dv = ∂ u ⊗ n da ∫∫RR∇ ⋅ T dv = ∂ T n da Kinematics The tensor that plays the most important role in kinematics is the Deformation Gradient x(X) = X + u(X) F = ∇X ⊗ x(X) = I + ∇X ⊗ u(X) F can be used to determine 1. -

A Simple Beam Test: Motivating High School Teachers to Develop Pre-Engineering Curricula
Session 2326 A Simple Beam Test: Motivating High School Teachers to Develop Pre-Engineering Curricula Eric E. Matsumoto, John R. Johnston, E. Edward Dammel, S.K. Ramesh California State University, Sacramento Abstract The College of Engineering and Computer Science at California State University, Sacramento has developed a daylong workshop for high school teachers interested in developing and teaching pre-engineering curricula. Recent workshop participants from nine high schools performed “hands-on” laboratory experiments that can be implemented at the high school level to introduce basic engineering principles and technology and to inspire students to study engineering. This paper describes one experiment that introduces fundamental structural engineering concepts through a simple beam test. A load is applied at the center of a beam using weights, and the resulting midspan deflection is measured. The elastic stiffness of the beam is determined and compared to published values for various beam materials and cross sectional shapes. Beams can also be tested to failure. This simple and inexpensive experiment provides a useful springboard for discussion of important engineering topics such as elastic and inelastic behavior, influence of materials and structural shapes, stiffness, strength, and failure modes. Background engineering concepts are also introduced to help high school teachers understand and implement the experiment. Participants rated the workshop highly and several teachers have already implemented workshop experiments in pre-engineering curricula. I. Introduction The College of Engineering and Computer Science at California State University, Sacramento has developed an active outreach program to attract students to the College and promote engineering education. In partnership with the Sacramento Engineering and Technology Regional Consortium1 (SETRC), the College has developed a daylong workshop for high school teachers interested in developing and teaching pre-engineering curricula. -

I-Beam Cantilever Racks Meet the Latest Addition to Our Quick Ship Line
48 HOUR QUICK SHIP Maximize storage and improve accessibility I-Beam cantilever racks Meet the latest addition to our Quick Ship line. Popular for their space-saving design, I-Beam cantilever racks can allow accessibility from both sides, allowing for faster load and unload times. Their robust construction reduces fork truck damage. Quick Ship I-beam cantilever racks offer: • 4‘ arm length, with 4” vertical adjustability • Freestanding heights of 12’ and 16’ • Structural steel construction with a 50,000 psi minimum yield • Heavy arm connector plate • Bolted base-to-column connection I-Beam Cantilever Racks can be built in either single- or double-sided configurations. How to design your cantilever rack systems 1. Determine the number and spacing of support arms. 1a The capacity of each 4’ arm is 2,600#, so you will need to make sure that you 1b use enough arms to accommodate your load. In addition, you can test for deflection by using wood blocks on the floor under the load. 1c Use enough arms under a load to prevent deflection of the load. Deflection causes undesirable side pressure on the arms. If you do not detect any deflection with two wood blocks, you may use two support arms. Note: Product should overhang the end of the rack by 1/2 of the upright centerline distance. If you notice deflection, try three supports. Add supports as necessary until deflection is eliminated. Loading without overhang is incorrect. I-Beam cantilever racks WWW.STEELKING.COM 2. Determine if Quick Ship I-Beam arm length is appropriate for your load. -

Pacific Northwest National Laboratory Operated by Battelie for the U.S
PNNL-11668 UC-2030 Pacific Northwest National Laboratory Operated by Battelie for the U.S. Department of Energy Seismic Event-Induced Waste Response and Gas Mobilization Predictions for Typical Hanf ord Waste Tank Configurations H. C. Reid J. E. Deibler 0C1 1 0 W97 OSTI September 1997 •-a Prepared for the US. Department of Energy under Contract DE-AC06-76RLO1830 1» DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government, Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC06-76RLO 1830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401, Available to the public from the National Technical Information Service, U.S. -
Hydrostatic Forces on Surface
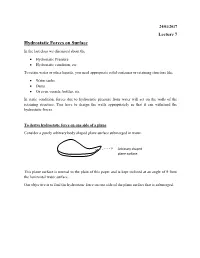
24/01/2017 Lecture 7 Hydrostatic Forces on Surface In the last class we discussed about the Hydrostatic Pressure Hydrostatic condition, etc. To retain water or other liquids, you need appropriate solid container or retaining structure like Water tanks Dams Or even vessels, bottles, etc. In static condition, forces due to hydrostatic pressure from water will act on the walls of the retaining structure. You have to design the walls appropriately so that it can withstand the hydrostatic forces. To derive hydrostatic force on one side of a plane Consider a purely arbitrary body shaped plane surface submerged in water. Arbitrary shaped plane surface This plane surface is normal to the plain of this paper and is kept inclined at an angle of θ from the horizontal water surface. Our objective is to find the hydrostatic force on one side of the plane surface that is submerged. (Source: Fluid Mechanics by F.M. White) Let ‘h’ be the depth from the free surface to any arbitrary element area ‘dA’ on the plane. Pressure at h(x,y) will be p = pa + ρgh where, pa = atmospheric pressure. For our convenience to make various points on the plane, we have taken the x-y coordinates accordingly. We also introduce a dummy variable ξ that show the inclined distance of the arbitrary element area dA from the free surface. The total hydrostatic force on one side of the plane is F pdA where, ‘A’ is the total area of the plane surface. A This hydrostatic force is similar to application of continuously varying load on the plane surface (recall solid mechanics). -

Guide to Rheological Nomenclature: Measurements in Ceramic Particulate Systems
NfST Nisr National institute of Standards and Technology Technology Administration, U.S. Department of Commerce NIST Special Publication 946 Guide to Rheological Nomenclature: Measurements in Ceramic Particulate Systems Vincent A. Hackley and Chiara F. Ferraris rhe National Institute of Standards and Technology was established in 1988 by Congress to "assist industry in the development of technology . needed to improve product quality, to modernize manufacturing processes, to ensure product reliability . and to facilitate rapid commercialization ... of products based on new scientific discoveries." NIST, originally founded as the National Bureau of Standards in 1901, works to strengthen U.S. industry's competitiveness; advance science and engineering; and improve public health, safety, and the environment. One of the agency's basic functions is to develop, maintain, and retain custody of the national standards of measurement, and provide the means and methods for comparing standards used in science, engineering, manufacturing, commerce, industry, and education with the standards adopted or recognized by the Federal Government. As an agency of the U.S. Commerce Department's Technology Administration, NIST conducts basic and applied research in the physical sciences and engineering, and develops measurement techniques, test methods, standards, and related services. The Institute does generic and precompetitive work on new and advanced technologies. NIST's research facilities are located at Gaithersburg, MD 20899, and at Boulder, CO 80303. -

Navier-Stokes-Equation
Math 613 * Fall 2018 * Victor Matveev Derivation of the Navier-Stokes Equation 1. Relationship between force (stress), stress tensor, and strain: Consider any sub-volume inside the fluid, with variable unit normal n to the surface of this sub-volume. Definition: Force per area at each point along the surface of this sub-volume is called the stress vector T. When fluid is not in motion, T is pointing parallel to the outward normal n, and its magnitude equals pressure p: T = p n. However, if there is shear flow, the two are not parallel to each other, so we need a marix (a tensor), called the stress-tensor , to express the force direction relative to the normal direction, defined as follows: T Tn or Tnkjjk As we will see below, σ is a symmetric matrix, so we can also write Tn or Tnkkjj The difference in directions of T and n is due to the non-diagonal “deviatoric” part of the stress tensor, jk, which makes the force deviate from the normal: jkp jk jk where p is the usual (scalar) pressure From general considerations, it is clear that the only source of such “skew” / ”deviatoric” force in fluid is the shear component of the flow, described by the shear (non-diagonal) part of the “strain rate” tensor e kj: 2 1 jk2ee jk mm jk where euujk j k k j (strain rate tensro) 3 2 Note: the funny construct 2/3 guarantees that the part of proportional to has a zero trace. The two terms above represent the most general (and the only possible) mathematical expression that depends on first-order velocity derivatives and is invariant under coordinate transformations like rotations. -

Using Lenterra Shear Stress Sensors to Measure Viscosity
Application Note: Using Lenterra Shear Stress Sensors to Measure Viscosity Guidelines for using Lenterra’s shear stress sensors for in-line, real-time measurement of viscosity in pipes, thin channels, and high-shear mixers. Shear Stress and Viscosity Shear stress is a force that acts on an object that is directed parallel to its surface. Lenterra’s RealShear™ sensors directly measure the wall shear stress caused by flowing or mixing fluids. As an example, when fluids pass between a rotor and a stator in a high-shear mixer, shear stress is experienced by the fluid and the surfaces that it is in contact with. A RealShear™ sensor can be mounted on the stator to measure this shear stress, as a means to monitor mixing processes or facilitate scale-up. Shear stress and viscosity are interrelated through the shear rate (velocity gradient) of a fluid: ∂u τ = µ = γµ & . ∂y Here τ is the shear stress, γ˙ is the shear rate, µ is the dynamic viscosity, u is the velocity component of the fluid tangential to the wall, and y is the distance from the wall. When the viscosity of a fluid is not a function of shear rate or shear stress, that fluid is described as “Newtonian.” In non-Newtonian fluids the viscosity of a fluid depends on the shear rate or stress (or in some cases the duration of stress). Certain non-Newtonian fluids behave as Newtonian fluids at high shear rates and can be described by the equation above. For others, the viscosity can be expressed with certain models.