Design and Experimental Results of the 1-T Bitter Electromagnet Testing Apparatus (BETA) E
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Improvements in Modern Weapons Systems: the Use of Dielectric
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 6 August 2021 doi:10.20944/preprints202108.0166.v1 Improvements in modern weapons systems: the use of dielectric materials for the development of advanced models of electric weapons powered by brushless homopolar generator Daniela Georgiana GOLEA PhD student, "Mihai Viteazul" National Intelligence Academy, Bucharest, Romania [email protected] Lucian Ștefan COZMA PhD in Military Sciences, National Defense University "Carol I", Bucharest, Romania PhD student, Faculty of Physics, Magurele, University of Bucharest, Romania [email protected] Abstract: Although the idea of making electric weapons has emerged since the beginning of the 20th Century, the great number of technological problems made that such technology was not developed. During the Cold War, the US strategic programme Space Defensive Initiative paid a special attention to this category of weapons, but the experiments have demonstrated that the prototypes are too big, very heavy, and involve a very high energy consumption and low reliability. Under these circumstances, the authors have noticed the trend to design new types of electric weapons starting from the hybridization of some technologies: the compressed flux weapons, the plasma electromagnetic cannon, the electromagnetic weapons as the coil-gun and rail-gun. Keywords: electric weapons, rail gun, electromagnetic ammunition, hybrid technologies, plasma detonator. Introduction Since the beginning of the XXth Century there have been concerns about the development of the electric weapons capable of equating and even exceeding the performance of firearms by using the electromagnetic forces. In order to see how this technology evolved and what prospects it opens, we will continue by giving five examples: the early electric weapons proposed by the inventor Fauchon Vileplee1; the electric weapon model analyzed by Ladislav Zenisek2; the model experienced by the French3 in the late 90s, and the model recently analyzed by lt.col. -

Final Copy 2018 06 19 Pottic
This electronic thesis or dissertation has been downloaded from Explore Bristol Research, http://research-information.bristol.ac.uk Author: Potticary, Jason L Title: Novel Approaches to Morphological and Polymorphological Control and Selectivity in Crystalline Systems General rights Access to the thesis is subject to the Creative Commons Attribution - NonCommercial-No Derivatives 4.0 International Public License. A copy of this may be found at https://creativecommons.org/licenses/by-nc-nd/4.0/legalcode This license sets out your rights and the restrictions that apply to your access to the thesis so it is important you read this before proceeding. Take down policy Some pages of this thesis may have been removed for copyright restrictions prior to having it been deposited in Explore Bristol Research. However, if you have discovered material within the thesis that you consider to be unlawful e.g. breaches of copyright (either yours or that of a third party) or any other law, including but not limited to those relating to patent, trademark, confidentiality, data protection, obscenity, defamation, libel, then please contact [email protected] and include the following information in your message: •Your contact details •Bibliographic details for the item, including a URL •An outline nature of the complaint Your claim will be investigated and, where appropriate, the item in question will be removed from public view as soon as possible. Novel Approaches to Morphological and Polymorphological Control and Selectivity in Crystalline Systems By JASON POTTICARY School of Chemistry UNIVERSITY OF BRISTOL A dissertation submitted to the University of Bristol in accordance with the requirements of the degree of DOCTOR OF PHILOSOPHY in the Faculty of Science. -

Abstracts Monday Poster Session
Monday Posters Poster-Mo01 Easy-plane ferroborates. Magnetopiezoelectric effects T.N.Gaydamak1, V.D. Fil1, I. A Gudim2 1B.Verkin Institute for Low Temperature Physics and Engineering of NAS of Ukraine,47 Nauky Ave., Kharkiv, 61103, Ukraine 2L.V. Kirensky Institute for Physics, Siberian Branch of the Russian Academy of Sciences,660036, Krasnoyarsk, Russia Rare-earth borates with formula RFe3(BO3)4 (R = Y; La-Nd; Sm-Er) are popular object of study because they the materials which combine magnetically ordered and ferroelectric media properties. This is why ferroborates belong to the family of multiferroics[1]. Since ferroborates belong to noncentrosymmetric class 32, the direct piezoelectric effect (PE) is allowed in these crystals. We have investigated the piezoelectric properties of SmFe3(BO3)4 and NdFe3(BO3)4 single crystals using the acoustic method [2]. It was found that in those compounds, the value of the piezoelectric modulus e11 in the paraelectric phase (≈ 1.4 C/m2) was almost an order of magnitude higher than that of the α - quartz, and, therefore, such compounds may be recommended for technical applications. In addition to the above-mentioned direct PE in multiferroics the indirect PE may exist. It consists in the joint action of the magnetoelastic and magnetoelectric mechanisms. Due to magnetoelasticity deformation changes the state of magnetic variables and through the magnetoelectric coupling excites the electric field (and vice versa). This effect was first discovered in samarium ferroborate [3]. In NdFe3(BO3)4 direct renormalization of the piezoelectric interaction in a magnetically ordered phase is observed [4]. [1] A.M. Kadomtseva,Yu. -

Benjamin Lax 1915–2015
Benjamin Lax 1915–2015 A Biographical Memoir by Roshan L. Aggarwal and Marion B. Reine ©2016 National Academy of Sciences. Any opinions expressed in this memoir are those of the authors and do not necessarily reflect the views of the National Academy of Sciences. BENJAMIN LAX December 29, 1915–April 21, 2015 Elected to the NAS, 1969 Benjamin Lax made significant and lasting contributions to solid-state physics and engineering. He innovated new resonance phenomena, including cyclotron reso- nance, to determine the basic band structure of semi- conductors. He pioneered the field of magneto-optics and made important theoretical contributions that led to the demonstration of the first semiconductor GaAs diode laser. His seminal basic and applied research on semicon- ductor physics and engineering, which included solid- state plasmas and quantum electronics, provided a foun- dation for the development of semiconductor technology. The locus of Ben’s sixty-year career was the Massachu- setts Institute of Technology (MIT). His career began By Roshan L. Aggarwal1 during World War II at the MIT Radiation Laboratory on and Marion B. Reine2 the MIT campus in Cambridge, Massachusetts. After the war, in 1951, he joined the recently formed MIT Lincoln Laboratory in Lexington, Massachusetts, where in 1958 he became the head of the Solid State Division and in 1964 the associate director of the Lincoln Laboratory. He champi- oned and secured funding for the Francis Bitter National Magnet Laboratory located on the MIT campus, and in 1960 he became the founding director of that laboratory. In 1965, he became a professor in the MIT Department of Physics, where he supervised thirty-six MIT doctoral students over a thirty-year period. -
Experimental Observation of Bethe Strings
Experimental Observation of Bethe Strings Zhe Wang1, Jianda Wu2, Wang Yang2, Anup Kumar Bera3,4, Dmytro Kamenskyi5, A.T.M. Nazmul Islam3, Shenglong Xu2, Joseph Matthew Law6, Bella Lake3,7, Congjun Wu2, Alois Loidl1 1Experimental Physics V, Center for Electronic Correlations and Magnetism, Institute of Physics, University of Augsburg, 86135 Augsburg, Germany 2Department of Physics, University of California, San Diego, California 92093, USA 3Helmholtz-Zentrum Berlin für Materialien und Energie, 14109 Berlin, Germany 4Solid State Physics Division, Bhabha Atomic Research Centre, Mumbai 400085, India 5High Field Magnet Laboratory, Radboud University, 6525 ED Nijmegen, The Netherlands 6Hochfeld Magnetlab Dresden, Helmholtz-Zentrum Dresden-Rossendorf, 01314 Dresden, Germany 7Institut für Festkörperphysik, Technische Universität Berlin, 10623 Berlin, Germany Abstract: Almost one century ago, string states - complex bound states (Wellenkomplexe) of magnetic excitations - have been predicted to exist in one-dimensional quantum magnets and since then become a subject of intensive theoretical study. However, experimental realization and identification of string states in condensed-matter systems remains an unsolved challenge up to date. Here we use high-resolution terahertz spectroscopy to identify string states in the antiferromagnetic Heisenberg-Ising chain SrCo2V2O8 in strong longitudinal magnetic fields. We observe complex bound states (strings) and fractional magnetic excitations (psinons and antipsinons) in the field-induced critical regime, which are precisely described by the Bethe ansatz. Our study reveals that two-string and three-string states govern the quantum spin dynamics close to the quantum criticality, while the fractional excitations are dominant at low energies, reflecting the antiferromagnetic quantum fluctuations. 1 Introduction: The one-dimensional spin-1/2 Heisenberg model is the paradigmatic model of interacting spin systems. -

Scaffold-Free and Label-Free Biofabrication Technology Using Levitational Assembly in a High Magnetic Field
Scaffold-free and label-free biofabrication technology using levitational assembly in a high magnetic field Citation for published version (APA): Parfenov, V. A., Mironov, V. A., van Kampen, K. A., Karalkin, P. A., Koudan, E. V., Pereira, F. DAS., Petrov, S. V., Nezhurina, E. K., Petrov, O. F., Myasnikov, M., Walboomers, F. X., Engelkamp, H., Christianen, P., Khesuani, Y. D., Moroni, L., & Mota, C. (2020). Scaffold-free and label-free biofabrication technology using levitational assembly in a high magnetic field. Biofabrication, 12(4), [045022]. https://doi.org/10.1088/1758-5090/ab7554 Document status and date: Published: 01/10/2020 DOI: 10.1088/1758-5090/ab7554 Document Version: Publisher's PDF, also known as Version of record Document license: Taverne Please check the document version of this publication: • A submitted manuscript is the version of the article upon submission and before peer-review. There can be important differences between the submitted version and the official published version of record. People interested in the research are advised to contact the author for the final version of the publication, or visit the DOI to the publisher's website. • The final author version and the galley proof are versions of the publication after peer review. • The final published version features the final layout of the paper including the volume, issue and page numbers. Link to publication General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. -

Doctoral Thesis
Czech Technical University in Prague Faculty of Electrical Engineering Doctoral Thesis June, 2020 Michal Ulvr Czech Technical University in Prague Faculty of Electrical Engineering Department of Measurement AC MAGNETIC FLUX DENSITY STANDARDS AND THEIR USE IN METROLOGY Doctoral Thesis Michal Ulvr Prague, June 2020 Ph.D. Programme: P2612 - Electrical Engineering and Information Technology Branch of study: 2601V006 - Measurement and Instrumentation Supervisor: Doc. Ing. Petr Kašpar, CSc. Declaration I declare, that this doctoral thesis is based at all my own work and I have cited all sources I have used in the bibliography. In Prague, June 22nd, 2020 Prohlášení Prohlašuji, že jsem předloženou disertační práci vypracoval samostatně a že jsem uvedl veškerou použitou literaturu. V Praze, 22. 6. 2020 …………......………………….. Michal Ulvr Acknowledgements I would like to express my gratitude to my supervisor, associate professor Petr Kašpar, and to my colleague, Dr. Josef Kupec, for their scientific and university guidance, invaluable comments and patience with my studies. Also I would like to thank my family for their support and patience throughout the study period. Abstract: This dissertation describes the development of AC magnetic flux density standards and their use in metrology. The dissertation focuses mainly on the design and realization of new standards, which will extend the existing ways of calibrating AC magnetometers in the primary laboratory of the Department of Electromagnetic Quantities of the Czech Metrology Institute. Various coil systems and various types of solenoids are commonly used for calibrating magnetometers (teslameters with a Hall probe, or 3-axis coil probe analyzers) up to several mT. The maximum value of the AC magnetic flux density generated in the center of the standard, and its homogeneity, depend on the dimensions and the type of the coil standard and the winding parameters. -
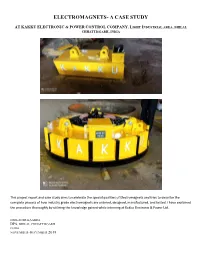
Electromagnets- a Case Study
ELECTROMAGNETS- A CASE STUDY AT KAKKU ELECTRONIC & POWER CONTROL COMPANY, LIGHT INDUSTRIAL AREA, BHILAI, CHHATTISGARH, INDIA This project report and case study aims to celebrate the special qualities of Electromagnets and tries to describe the complete process of how industry grade electromagnets are ordered, designed, manufactured, and tested. I have explained the procedure thoroughly by utilizing the knowledge gained while interning at Kakku Electronic & Power Ltd. NEELANSH KAABRA DPS, BHILAI, CHHATTISGARH INDIA NOVEMBER-DECEMBER 2019 INTRODUCTION Magnets play an integral role in our lives. This case study aims to highlight the importance of magnets in the human world, the special qualities of electromagnets and about the actual process of making industry grade electromagnets. Magnets are objects that generate a magnetic field, a force-field that either pulls or repels certain materials, such as steel and iron. The focus of this case study will be on a special type of magnet known as Electromagnets. Electromagnets work on a fundamental force called electromagnetism. In the 19th Century, Hans Christian Ørsted noticed that a wire with a current running through it affected a nearby compass. The current was creating a magnetic field. Later research showed that electric current and magnetism are actually two aspects of the same force. This force works both ways – a moving magnetic field creates electric current. An Electromagnet can be defined as a magnet which functions on electricity. Unlike a permanent magnet, the strength of an electromagnet can be altered. By controlling the electric current we can control the magnetic field, i.e., the strength of electric field controls the strength of magnetic field also. -

Experimental Observation of Bethe Strings Zhe Wang1,2, Jianda Wu3†, Wang Yang3, Anup Kumar Bera4,5, Dmytro Kamenskyi6, A
LETTER doi:10.1038/nature25466 Experimental observation of Bethe strings Zhe Wang1,2, Jianda Wu3†, Wang Yang3, Anup Kumar Bera4,5, Dmytro Kamenskyi6, A. T. M. Nazmul Islam4, Shenglong Xu3, Joseph Matthew Law7, Bella Lake4,8, Congjun Wu3 & Alois Loidl1 Almost a century ago, string states—complex bound states of systems. Here, we perform terahertz spectroscopy on the one-dimen- magnetic excitations—were predicted to exist in one-dimensional sional Heisenberg–Ising antiferromagnetic system SrCo2V2O8 in quantum magnets1. However, despite many theoretical studies2–11, longitudinal magnetic fields. We show that when the spin gap is closed the experimental realization and identification of string states in a c a condensed-matter system have yet to be achieved. Here we use b high-resolution terahertz spectroscopy to resolve string states in Co2+ 4 a the antiferromagnetic Heisenberg–Ising chain SrCo2V2O8 in strong O2– 3 longitudinal magnetic fields. In the field-induced quantum-critical J regime, we identify strings and fractional magnetic excitations 1 that are accurately described by the Bethe ansatz1,3,4. Close to 2 quantum criticality, the string excitations govern the quantum spin dynamics, whereas the fractional excitations, which are dominant B || c at low energies, reflect the antiferromagnetic quantum fluctuations. Sz = 0 Néel-ordered B < B = 4 T Today, Bethe’s result1 is important not only in the field of quantum T c magnetism but also more broadly, including in the study of cold atoms and in string theory; hence, we anticipate that our work will Sz = N/2 T Field-polarized B > Bs = 28.7 T shed light on the study of complex many-body systems in general. -

Electromagnet - Wikipedia, the Free Encyclopedia Page 1 of 10
Electromagnet - Wikipedia, the free encyclopedia Page 1 of 10 Electromagnet From Wikipedia, the free encyclopedia An electromagnet is a type of magnet in which the magnetic field is produced by the flow of electric current. The magnetic field disappears when the current ceases. Contents 1 Introduction 2 How electromagnets work 3 History 4 Analysis of ferromagnetic electromagnets 4.1 Magnetic circuit - the constant B field approximation 4.2 Magnetic field created by a current 4.3 Force exerted by magnetic field Electromagnet attracts paper 4.4 Closed magnetic circuit clips when current is applied creating a magnetic field, loses 4.5 Force between electromagnets them when current and 5 Side effects in large electromagnets magnetic field are removed 5.1 Ohmic heating 5.2 Inductive voltage spikes 5.3 Lorentz forces 5.4 Core losses 6 High field electromagnets 6.1 Superconducting electromagnets 6.2 Bitter electromagnets 6.3 Exploding electromagnets 7 Uses of electromagnets 8 Definition of terms 9 See also 10 References 11 External links Introduction A wire with an electric current passing through it, generates a magnetic field around it, this is a simple electromagnet. The strength of magnetic field generated is proportional to the amount of current. In order to concentrate the magnetic field generated by a wire, it is commonly wound into a coil, where many turns of wire sit side by side. The magnetic field of all the turns of wire passes through the center of the coil. A coil forming the shape of a straight tube, a helix (similar to a corkscrew) is called a solenoid; a solenoid that is bent into a donut shape so that the ends meet is a toroid. -

(12) United States Patent (10) Patent No.: US 9,536,650 B2 Fullerton (45) Date of Patent: Jan
USOO953665OB2 (12) United States Patent (10) Patent No.: US 9,536,650 B2 Fullerton (45) Date of Patent: Jan. 3, 2017 (54) MAGNETIC STRUCTURE FOREIGN PATENT DOCUMENTS (71) Applicant: Correlated Magnetics Research, CN 1615573. A 5, 2005 LLC., New Hope, AL (US) DE 2938782 A1 4f1981 (Continued) (72) Inventor: Larry W. Fullerton, New Hope, AL (US) OTHER PUBLICATIONS (73) Assignee: CORRELATED MAGNETICS Series BNS, Compatible Series AES Safety Controllers, http:// RESEARCH, LLC., New Hope, AL www.schmersalusa.com/safety controllers/drawingsfaes.pdf, pp. (US) 159-175, date unknown. (*) Notice: Subject to any disclaimer, the term of this (Continued) patent is extended or adjusted under 35 U.S.C. 154(b) by 0 days. Primary Examiner — Ramon M Barrera (21) Appl. No.: 14/461,370 (74) Attorney, Agent, or Firm — William J. Tucker (22) Filed: Aug. 16, 2014 (57) ABSTRACT (65) Prior Publication Data Magnetic structure production may relate, by way of US 2015/OO223OO A1 Jan. 22, 2015 example but not limitation, to methods, systems, etc. for Related U.S. Application Data producing magnetic structures by printing magnetic pixels (aka maxels) into a magnetizable material. Disclosed herein (60) Continuation of application No. 14/176,052, filed on is production of magnetic structures having, for example: Feb. 8, 2014, now Pat. No. 8,816,805, which is a maxels of varying shapes, maxels with different positioning, (Continued) individual maxels with different properties, maxel patterns (51) Int. Cl. having different magnetic field characteristics, combinations HOIF 7/02 (2006.01) thereof, and so forth. In certain example implementations HOIF I3/00 (2006.01) disclosed herein, a second maxel may be printed Such that it (52) U.S. -

Electromagnets- a Case Study
ELECTROMAGNETS- A CASE STUDY AT KAKKU ELECTRONIC & POWER CONTROL COMPANY, LIGHT INDUSTRIAL AREA, BHILAI, CHHATTISGARH, INDIA This project report and case study aims to celebrate the special qualities of Electromagnets and tries to describe the complete process of how industry grade electromagnets are ordered, designed, manufactured, and tested. I have explained the procedure thoroughly by utilizing the knowledge gained while interning at Kakku Electronic & Power Ltd. NEELANSH KAABRA DPS, BHILAI, CHHATTISGARH INDIA NOVEMBER-DECEMBER 2019 INTRODUCTION Magnets play an integral role in our lives. This case study aims to highlight the importance of magnets in the human world, the special qualities of electromagnets and about the actual process of making industry grade electromagnets. Magnets are objects that generate a magnetic field, a force-field that either pulls or repels certain materials, such as steel and iron. The focus of this case study will be on a special type of magnet known as Electromagnets. Electromagnets work on a fundamental force called electromagnetism. In the 19th Century, Hans Christian Ørsted noticed that a wire with a current running through it affected a nearby compass. The current was creating a magnetic field. Later research showed that electric current and magnetism are actually two aspects of the same force. This force works both ways – a moving magnetic field creates electric current. An Electromagnet can be defined as a magnet which functions on electricity. Unlike a permanent magnet, the strength of an electromagnet can be altered. By controlling the electric current we can control the magnetic field, i.e., the strength of electric field controls the strength of magnetic field also.