Sidewalk Roughness Data Classification by Cluster Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Free Max Payne Mobile Download for Android Free Max Payne Mobile Download for Android
free max payne mobile download for android Free max payne mobile download for android. Completing the CAPTCHA proves you are a human and gives you temporary access to the web property. What can I do to prevent this in the future? If you are on a personal connection, like at home, you can run an anti-virus scan on your device to make sure it is not infected with malware. If you are at an office or shared network, you can ask the network administrator to run a scan across the network looking for misconfigured or infected devices. Cloudflare Ray ID: 669b2c4dea3d84ec • Your IP : 188.246.226.140 • Performance & security by Cloudflare. Max Payne. Max Payne is a shooter video game in which you will have to avenge the death of the main character's family. With Max Payne your entertainment is guaranteed. 1 2 3 4 5 6 7 8 9 10. Few games have managed to revolutionize, even in the slightest, their genre. Max Payne managed it when it was launched, becoming a milestone in the third person shooter genre. The major invention that can be ascribed to Max Payne is the inclusion of short intervals called " Bullet Time " where everything happened in slow motion, copying what we had been seen in Matrix. Nevertheless, the game also innovated in other aspects, especially the storyline that for the first time presented a rather noir environment , with afflicted characters and situations that could only be solved with a shoot out. The story starts with the killing of the main character's wife and daughter, this torments Max, and he searches for the culprits, seeking revenge . -

Device Listing for Tablet Keeper 2.0 Template 01-31-13
Clover Trace 'n Create Templates - E-Tablet Paper Tablet Keepers 2.0 Device Width Height Depth Available From Tablet Keeper Dell Streak 7 7 4.7 0.5 Dell X-Small 2.0 Tablet Keeper Template Kindle 6.5 4.5 0.34 Amazon X-Small 2.0 Tablet Keeper Template Kindle Paperwhite 6.7 4.6 0.36 Amazon X-Small 2.0 Tablet Keeper Template Kindle Touch 6.8 4.7 0.4 Amazon X-Small 2.0 Tablet Keeper Template KOBO Touch 6.5 4.5 0.4 KOBO Books X-Small 2.0 Tablet Keeper Template Nook Simple Touch 6.5 5 0.47 Barnes & Noble X-Small 2.0 Tablet Keeper Template Nook Simple Touch w/GlowLight 6.5 5 0.47 Barnes & Noble X-Small 2.0 Tablet Keeper Template Sony Digital Reader Touch Edition 6.9 4.8 0.4 Sony X-Small 2.0 Tablet Keeper Template Acer Iconia Tab A101 7.68 4.61 0.54 Acer Small 2.0 Tablet Keeper Template Acer Iconia Tab A110 7" 7.6 4.98 0.45 Acer Small 2.0 Tablet Keeper Template Asus Nexus 7 7.81 4.72 0.41 Asus Small 2.0 Tablet Keeper Template Asus Eee Pad MeMo 3D 7.81 4.6 0.45 Asus Small 2.0 Tablet Keeper Template BlackBerry PlayBook Tablet 7.6 5.12 0.38 Sprint, Staples Small 2.0 Tablet Keeper Template Coby Kyros 7-inch Android 2.3 7.7 4.7 0.6 Amazon Small 2.0 Tablet Keeper Template Google Nexus 7 Tablet 7.81 4.72 0.41 Google, Amazon Small 2.0 Tablet Keeper Template HTC EVO View 4G 7.7 4.8 0.5 Sprint Small 2.0 Tablet Keeper Template HTC Flyer 7.68 4.92 0.51 US Cellular Small 2.0 Tablet Keeper Template Kindle Fire 7.44 4.72 0.45 Amazon Small 2.0 Tablet Keeper Template Kindle Fire HD 7" 7.6 5.4 0.4 Amazon Small 2.0 Tablet Keeper Template Kindle Keyboard 7.5 4.8 -

A Future Projection of Hardware, Software, and Market Trends of Tablet Computers
A Future Projection of Hardware, Software, and Market Trends of Tablet computers Honors Project In fulfillment of the Requirements for The Esther G. Maynor Honors College University of North Carolina at Pembroke By Christopher R. Hudson Department of Mathematics and Computer Science April 15,2013 Name Date Honors CoUege Scholar Name Date Faculty Mentor Mark Nfalewicz,/h.D. / /" Date Dean/Esther G/Maynor Honors College Acknowledgments We are grateful to the University of North Carolina Pembroke Department of Computer Science for the support of this research. We are also grateful for assistance with editing by Jordan Smink. ii TABLE OF CONTENTS Abstract........................................................................................................................................... 1 Background..................................................................................................................................... 2 Materials and Methods.................................................................................................................... 3 Results……..................................................................................................................................... 5 Discussion...................................................................................................................................... 8 References..................................................................................................................................... 10 iii List of Tables Table 1 Page 7 -

MMS Copy of Supported Devices
Good For Enterprise ‐ Certified Devices Country Network Platform Device All All Android Asus Eee Pad Transformer Prime All All Android Cisco Cius All All Android Google Nexus One All All Android HTC Desire (globally unlocked) All All Android HTC Legend (globally unlocked) All All Android HTC One (Google Play Edition) All All Android Kindle Fire All All Android LG Optimus 2X (globally unlocked) All All Android Moto G (Global unlocked) All All Android Moto G (US unlocked) All All Android Motorola Milestone (globally unlocked) All All Android Motorola Milestone 2 (globally unlocked) All All Android Motorola Xoom 2 WiFi All All Android Motorola Xoom WiFi All All Android Nexus 10 All All Android Nexus 4 All All Android Nexus 5 All All Android Nexus 7 (2012, 2013, WiFi only) All All Android Samsung Galaxy Nexus (globally unlocked) All All Android Samsung Galaxy Note 8 (WiFi only) All All Android Samsung Galaxy Note 10.1 (Intl. WiFi only) All All Android Samsung Galaxy Note 10.1 (U.S WiFi only) All All Android Samsung Galaxy Note 10.1 (2014) (WiFi only) All All Android Samsung Galaxy S II All All Android Samsung Galaxy S III (globally unlocked) All All Android Samsung Galaxy S III mini All All Android Samsung Galaxy S4 (Google Play Edition) All All Android Samsung Galaxy S4 (GT‐I9500) All All Android Samsung Galaxy S4 (GT‐I9505) All All Android Samsung Galaxy Tab 2 7 (WiFi only) All All Android Samsung Galaxy Tab 3 (7‐inch) All All Android Samsung Galaxy Tab 3 (8‐inch) All All Android Samsung Galaxy Tab 10.1 (WiFi only) All All Android Samsung -
Udynamo Compatibility List
uDynamo Compatibility List Reader Manuf. Device Name Alt. Model Info Model Info OS OS Version Carrier Date Added Date Tested Type iDynamo 5 Apple iPad Air 2 Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPad Air* Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPad with Retina Display* Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPad mini 3 Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPad mini 2 Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPad mini* Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPhone 5c* Lightning N/A iOS N/A N/A Phone iDynamo 5 Apple iPhone 5s* Lightning N/A iOS N/A N/A Phone iDynamo 5 Apple iPhone 5* Lightning N/A iOS N/A N/A Phone iDynamo 5 Apple iPod touch (5th* generation) Lightning N/A iOS N/A N/A iPod iDynamo 5 Apple iPhone 6* Lightning N/A iOS N/A N/A Phone iDynamo 5 Apple iPhone 6 Plus* Lightning N/A iOS N/A N/A Phone iDynamo Apple iPad (3rd generation) 30 PIN N/A iOS N/A N/A Tablet iDynamo Apple iPad 2 30 PIN N/A iOS N/A N/A Tablet iDynamo Apple iPad 30 PIN N/A iOS N/A N/A Tablet iDynamo Apple iPhone 4s 30 PIN N/A iOS N/A N/A Phone iDynamo Apple iPhone 4 30 PIN N/A iOS N/A N/A Phone iDynamo Apple iPhone 3GS 30 PIN N/A iOS N/A N/A Phone iDynamo Apple iPod touch (3rd and 4th generation) 30 PIN N/A iOS N/A N/A iPod uDynamo Acer liquid MT liquid MT Android 2.3.6 101.18 1/24/14 1/24/14 uDynamo Alcatel Alcatel OneTouch Fierce 7024W Android 4.2.2 101.18 3/6/14 3/6/14 uDynamo ALCATEL Megane ALCATEL ONE TOUCH 5020T Android 4.1.2 101.18 8/10/15 8/10/15 uDynamo ALCATEL ALCATEL ONE TOUCH IDOL X ALCATEL -
RESEARCH REPORT: Situated-Technology
Situated-technology – Enhanced learning through development of interactive etextbooks on net tablets Selena Chan Katrina Fisher Peter Sauer December 2011 1 Contents Acknowledgements: .......................................................................................................... 4 Summary ........................................................................................................................... 4 Introduction ........................................................................................................................... 6 Pedagogical approaches to the project ................................................................................. 7 Mobile learning .................................................................................................................. 7 Constructivism and connectivism ....................................................................................... 8 Situated learning ................................................................................................................... 9 Multi-modality and multiliteracy ........................................................................................ 10 Towards situated-technology-enhanced learning ............................................................. 10 Project rationale .................................................................................................................. 11 Meeting student needs ................................................................................................... -
Automated Sidewalk Quality and Safety Assessment System
GEORGIA DOT RESEARCH PROJECT 12-16 FINAL REPORT Automated Sidewalk Quality and Safety Assessment System (Regional University Transportation Center Subproject) OFFICE OF RESEARCH 15 KENNEDY DRIVE FOREST PARK, GA, 30297-2534 1.Report No.: 2. Government Accession No.: 3. Recipient's Catalog No.: FHWA-GA-15-1216 NA NA 4. Title and Subtitle: 5. Report Date: Automated Sidewalk Quality and Safety September 2015 Assessment System (Regional University 6. Performing Organization Code: Transportation Center Subproject) NA 7. Author(s): 8. Performing Organization Report No.: Randall Guensler, Alice Grossman, Alexandra 12-16 Frackelton, Vetri Elango, Yanzhi Xu, Chris Toth, Alper Akanser, Felipe Castrillon, Evangelos Palinginis, and Ramik Sadana 9. Performing Organization Name and Address: 10. Work Unit No.: Georgia Institute of Technology NA School of Civil and Environmental Engineering 790 Atlantic Dr. 11. Contract or Grant No.: Atlanta, GA 30332-0355 0011746 12. Sponsoring Agency Name and Address: 13. Type of Report and Period Covered: Georgia Department of Transportation Final; August 2012 – September 2015 Office of Research 14. Sponsoring Agency Code: 15 Kennedy Drive NA Forest Park, GA 30297-2534 15. Supplementary Notes: Prepared in cooperation with the U.S. Department of Transportation, Federal Highway Administration. 16. Abstract: Sidewalks are often unsafe, exposing pedestrians, wheelchairs users, travelers with strollers, and persons carrying heavy loads to unnecessary risk. However, prioritizing sidewalk repairs and improvements requires knowledge about the current system state. The Automated Sidewalk Quality and Safety Assessment System developed in this project can help communities evaluate the condition of sidewalks and pathways based on sidewalk existence, condition, and conformance with Americans with Disabilities Act (ADA) standards. -

COMPUTADORES 42 Players De Mídia Digital | Mundial: 212-444-6728
COMPUTADORES 42 Players de Mídia Digital www.bhfotovideo.com | Mundial: 212-444-6728 VIDA DIGITAL Sem dúvidas estamos vivendo na era digital. Música, fotografia, vídeo — tudo é digital, e tudo está na ponta dos dedos. A tecnologia digital transformou o jeito que trabalhamos, nos divertimos e nos comunicamos. Desde as fotos que tiramos com nossas câmeras digitais, às músicas que ouvimos em nossos players de música, e também toda a informação armazenada em nossos computadores, PDAs e telefones celulares, tudo se baseia em algum tipo de formato de arquivo digital. Seja em viagens de carro, trem ou avião; enquanto estudamos, corremos, malhamos - e até nadando - obviamente queremos nossos vídeos, músicas, filmes, programas de TV e podcasts conosco. A indústria em geral tem feito grandes progressos no desenvolvimento de produtos e serviços inovadores que ajudam a tornar a vida digital uma realidade para os consumidores. O!Play LIVE BV-980H APPLE TV Player de Mídia Digital Gravador de Vídeo Digital HD • Faz o stream de programas de TV e filmes HD alugados pelo iTunes • Faça o stream de todos os • Grave com qualidade 1080i e de conteúdos do Netflix, arquivos de mídia do PC • Disco rígido de 320GB YouTube e Flick • Saída de áudio para a tela grande da TV • E/S de vídeo composto ótica digital e HDMI; conecta-se à • Curta dezenas de serviços • Closed Caption rede via Wireless-N ou Ethernet de streaming de música e vídeo online • Dolby Digital AC-3 • Vídeo Full HD 1080p e som surround de 7.1 canais TrueHD • Também é possível fazer o stream • Timeshifting -

Accessory Mounts (K0108)
Accessory Mounts (K0108) Easily mount tablets, phones, cup holders and more right where they are needed with this new line of accessory mounts. Accessory Mounts allow for rotation and angle adjustment to precisely position devices. Wide range of mounting solutions—suction cups for mounting to trays and work surfaces, mount for Retract4 swing-away arm, variety of bases for attaching to different chairs and surfaces.Easy to customize and create a unique set-up with a variety of device holders, extension arms and adapters. 10" Tablet holder on Roto View Mount with Bluetooth Keyboard 10" Tablet holder and Smart Phone holder with Retract4 Midline Ring Adapters and extension arms on the Retract4 Arm Swivel Cup holder with extension arm and Suction Cup Base Device Holders 10" Tablet Universal X-Grip III Simple to open and close, the spring loaded RAM X-Grip® III leaves the outside edge of the tablet almost completely free of obstructions. Soft rubber fingers apply just enough force to hold the tablet safe and secure. Consists of a composite spring loaded cradle, expandable grip arms and additional bottom support keeper. Expands and contracts for perfect fit of most 10" tablets with or without sleeves, as well as some smaller tablets. Compatible devices: Apple iPad 1, 2, 3, 4, Air; Asus EEE Pad, EEE Pad Transformer; HP TouchPad; Lenova LePad; LG G-Slate, Optimus Pad; Motorola XOOM, XOOM2; Microsoft Surface; Samsung Galaxy Tab 8.9, 10.1; Toshiba Thrive. Minimum Width = 6.25"; Maximum Width = 8.1"; Maximum Length = 10.25" 70-DM970 Sugg. Retail: $75.00 7" Tablet Universal X-Grip Compact mount has a four leg design that sports great holding power without hiding the tablet behind foam pads and plastic. -
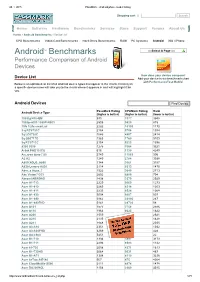
Androidtm Benchmarks
28. 1. 2015 PassMark Android phone model listing Shopping cart | Search Home Software Hardware Benchmarks Services Store Support Forums About Us Home » Android Benchmarks » Device List CPU Benchmarks Video Card Benchmarks Hard Drive Benchmarks RAM PC Systems Android iOS / iPhone TM Select A Page Android Benchmarks Performance Comparison of Android Devices How does your device compare? Device List Add your device to our benchmark chart with PerformanceTest Mobile! Below is an alphabetical list of all Android device types that appear in the charts. Clicking on a specific device name will take you to the charts where it appears in and will highlight it for you. Android Devices Find Device PassMark Rating CPUMark Rating Rank Android Device Type (higher is better) (higher is better) (lower is better) 1005tg N10QM 935 3377 3948 1080pn003 1080PN003 2505 9820 815 1life 1Life.smart.air 2282 10103 1170 3q RC9731C 2154 5756 1394 3q LC0720C 1646 4897 2414 3q QS0717D 1363 1760 3109 3q RC9712C 2154 5223 1396 9300 9300 1275 3364 3321 Alink PAD10 ICS 616 1130 4249 A.c.ryan dyno 7.85 2749 11065 596 A2 A2 1240 2784 3388 A800 XOLO_A800 1344 3661 3157 A830 Lenovo A830 2114 8313 1470 Abs_a Aqua_7 1522 3640 2713 Abc Vision7DCI 2602 6880 704 Abroad ABROAD 1438 3379 2929 Acer A1713 2229 9069 1273 Acer A1810 2265 8314 1203 Acer A1811 2233 8524 1268 Acer A1830 3004 9207 507 Acer A1840 3962 23996 267 Acer A1840FHD 5141 28720 58 Acer A101 1577 3758 2586 Acer A110 1964 8623 1822 Acer A200 1559 3822 2621 Acer A210 2135 8315 1428 Acer A211 1848 8130 2035 Acer A3A10 2351 8128 1032 Acer A3A20FHD 3269 11265 428 Acer AA3600 5451 22392 22 Acer B1710 1336 3897 3173 Acer B1711 2293 8583 1142 Acer b1720 2058 4371 1613 Acer B1730HD 3064 9031 487 Acer B1A71 1308 4119 3236 Acer beTouch E140 567 475 4264 Acer CloudMobile S500 2111 4874 1478 Acer DA220HQL 1156 2960 3545 http://www.androidbenchmark.net/device_list.php 1/71 28. -

The Online Reporter 775-I
France Telecom Orange Prepares for an OTT Future page 5 30 March - 5 April 2012 Issue 775-I Telcos to Offer 100 Mbps UltraViolet to Change How Over Copper Wires Consumers Buy & View Movies & TV Shows - DSL Technology Gets Souped Up to - Creates a Family’s Library of Digital be made available on Vudu as part of a Walmart VDSL2 with Vectoring Content That Their Devices Can Access initiative on April 16. - ASSIA Software Makes DSL/VDSL - Streams & Downloads to up to 6 UltraViolet is backed by more than 70 compa- Operate More Efficiently Household Members nies, including most Hollywood studios, CE makers and pay TV services. It’s administered Significance: 70% of the world’s - Puts the Studios Squarely in the Digital by a consortium of them called the Digital broadband homes can get it over the Era telcos’ copper wires, not over coax Entertainment Content Ecosystem (DECE). or fiber. So to get 100 Mbps avail- Significance: Registering a new Blu- The two notable missing members are: able to every residence, it’ll have ray/DVD movie with UltraViolet is now - Disney, which is developing its own to be done with new technology for very quick and easy. Consumers can scheme for digitally distributed content copper wires. then easily play recently purchased movies on their digital devices, and called Keychest. The headlines lately about broadband have the studios can protect their content - Apple — which, of course, has its own been about how China is building the world’s from piracy. The studios still need a service for storing purchased content in its largest fiber-optic broadband network for 200 better process for registering previ- iCloud. -
Acer Iconia One 10 (B3 A20)
Brand Model Acer Aspire M5 Acer Aspire R7 Acer Aspire Switch 10E Tablet Acer Iconia One 10 (B3 A20) Acer Iconia One 10 (B3 A20) Acer Iconia One 10 (B3 A30) Acer iconia tab 10in Acer Iconia Tab A200 Acer Iconia Tab A500 Acer Iconia W700P Acer motion commputing Acer Switch One 10 Alcatel Plus 2in1 10 Amazon Kindle Fire HD 10 Inch 2015 Apple iPad (1st Generation) Apple iPad 2/3/4 Apple iPad Air Apple iPad Air 2 Apple iPad Air ZAGGkeys Cover Friendly Screen Apple Ipad pro Apple iPad Pro 10.5 Apple iPad pro 9.7 Apple iPad pro 9.7 2017 Archos 90b NEON Asus EEE Pad Transformer Asus EEE Pad Transformer Prime Asus EEE Slate EP121 Asus Memo Pad 10 Asus Memo Pad Smart Asus Q500A Asus T200T Tablet Asus Transformer book t100 Asus Transformer Pad Infinity TF700T Asus Transformer Pad Infinity TF700T Mobile Dock Compat Asus Transformer Pad TF300 Asus VivoTab RT Asus ZENPAD 10 Asus ZenPad 3s 10 (Z500M) Blackberry Priv BQ Aquaris M10 BQ Tesla 2W10 Coby Kyros MID8042 Coby Kyros MID8127 Dell Inspiron duo Dell Latitude 10 tablet Dell Venue 10 Pro Dell Venue Pro 11 Dell XPS 10 Tablet Dell XPS 12 Ultrabook Edison 3 (European) Hannspree Hannspad HP Elite Pad 1000 G2 HP Elitepad 900 HP Envy X2 HP HP Slatebook X2 HP Pavilion x2 HP Pavilion x2 Huawei MediaPad T1 10 Huawei T2 Tab Pro 10 Insignia Flex 10.1 Ionik Global Tab L1001 4G Kobo Arc 10 HD Lamina 10inch T-1001BM-SE (European) Lamina T1010B Nord Lenovo IdeaPad P400 Touch Lenovo Ideapad Tablet K1 Lenovo ideapad yoga 11s Lenovo IdeaTab S6000 10.1 Lenovo P70 Lenovo TAB 2 A10-30 Lenovo Tab 2 A10-70 Lenovo TAB A10