Linpack Evaluation on a Supercomputer with Heterogeneous Accelerators
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Tsubame 2.5 Towards 3.0 and Beyond to Exascale
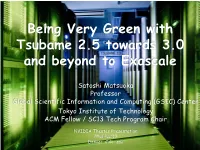
Being Very Green with Tsubame 2.5 towards 3.0 and beyond to Exascale Satoshi Matsuoka Professor Global Scientific Information and Computing (GSIC) Center Tokyo Institute of Technology ACM Fellow / SC13 Tech Program Chair NVIDIA Theater Presentation 2013/11/19 Denver, Colorado TSUBAME2.0 NEC Confidential TSUBAME2.0 Nov. 1, 2010 “The Greenest Production Supercomputer in the World” TSUBAME 2.0 New Development >600TB/s Mem BW 220Tbps NW >12TB/s Mem BW >400GB/s Mem BW >1.6TB/s Mem BW Bisecion BW 80Gbps NW BW 35KW Max 1.4MW Max 32nm 40nm ~1KW max 3 Performance Comparison of CPU vs. GPU 1750 GPU 200 GPU ] 1500 160 1250 GByte/s 1000 120 750 80 500 CPU CPU 250 40 Peak Performance [GFLOPS] Performance Peak 0 Memory Bandwidth [ Bandwidth Memory 0 x5-6 socket-to-socket advantage in both compute and memory bandwidth, Same power (200W GPU vs. 200W CPU+memory+NW+…) NEC Confidential TSUBAME2.0 Compute Node 1.6 Tflops Thin 400GB/s Productized Node Mem BW as HP 80GBps NW ProLiant Infiniband QDR x2 (80Gbps) ~1KW max SL390s HP SL390G7 (Developed for TSUBAME 2.0) GPU: NVIDIA Fermi M2050 x 3 515GFlops, 3GByte memory /GPU CPU: Intel Westmere-EP 2.93GHz x2 (12cores/node) Multi I/O chips, 72 PCI-e (16 x 4 + 4 x 2) lanes --- 3GPUs + 2 IB QDR Memory: 54, 96 GB DDR3-1333 SSD:60GBx2, 120GBx2 Total Perf 2.4PFlops Mem: ~100TB NEC Confidential SSD: ~200TB 4-1 2010: TSUBAME2.0 as No.1 in Japan > All Other Japanese Centers on the Top500 COMBINED 2.3 PetaFlops Total 2.4 Petaflops #4 Top500, Nov. -
(Intel® OPA) for Tsubame 3
CASE STUDY High Performance Computing (HPC) with Intel® Omni-Path Architecture Tokyo Institute of Technology Chooses Intel® Omni-Path Architecture for Tsubame 3 Price/performance, thermal stability, and adaptive routing are key features for enabling #1 on Green 500 list Challenge How do you make a good thing better? Professor Satoshi Matsuoka of the Tokyo Institute of Technology (Tokyo Tech) has been designing and building high- performance computing (HPC) clusters for 20 years. Among the systems he and his team at Tokyo Tech have architected, Tsubame 1 (2006) and Tsubame 2 (2010) have shown him the importance of heterogeneous HPC systems for scientific research, analytics, and artificial intelligence (AI). Tsubame 2, built on Intel® Xeon® Tsubame at a glance processors and Nvidia* GPUs with InfiniBand* QDR, was Japan’s first peta-scale • Tsubame 3, the second- HPC production system that achieved #4 on the Top500, was the #1 Green 500 generation large, production production supercomputer, and was the fastest supercomputer in Japan at the time. cluster based on heterogeneous computing at Tokyo Institute of Technology (Tokyo Tech); #61 on June 2017 Top 500 list and #1 on June 2017 Green 500 list For Matsuoka, the next-generation machine needed to take all the goodness of Tsubame 2, enhance it with new technologies to not only advance all the current • The system based upon HPE and latest generations of simulation codes, but also drive the latest application Apollo* 8600 blades, which targets—which included deep learning/machine learning, AI, and very big data are smaller than a 1U server, analytics—and make it more efficient that its predecessor. -

Supermatrix: a Multithreaded Runtime Scheduling System for Algorithms-By-Blocks
SuperMatrix: A Multithreaded Runtime Scheduling System for Algorithms-by-Blocks Ernie Chan Field G. Van Zee Paolo Bientinesi Enrique S. Quintana-Ort´ı Robert van de Geijn Department of Computer Science Gregorio Quintana-Ort´ı Department of Computer Sciences Duke University Departamento de Ingenier´ıa y Ciencia de The University of Texas at Austin Durham, NC 27708 Computadores Austin, Texas 78712 [email protected] Universidad Jaume I {echan,field,rvdg}@cs.utexas.edu 12.071–Castellon,´ Spain {quintana,gquintan}@icc.uji.es Abstract which led to the adoption of out-of-order execution in many com- This paper describes SuperMatrix, a runtime system that paral- puter microarchitectures [32]. For the dense linear algebra opera- lelizes matrix operations for SMP and/or multi-core architectures. tions on which we will concentrate in this paper, many researchers We use this system to demonstrate how code described at a high in the early days of distributed-memory computing recognized that level of abstraction can achieve high performance on such archi- “compute-ahead” techniques could be used to improve parallelism. tectures while completely hiding the parallelism from the library However, the coding complexity required of such an effort proved programmer. The key insight entails viewing matrices hierarchi- too great for these techniques to gain wide acceptance. In fact, cally, consisting of blocks that serve as units of data where oper- compute-ahead optimizations are still absent from linear algebra ations over those blocks are treated as units of computation. The packages such as ScaLAPACK [12] and PLAPACK [34]. implementation transparently enqueues the required operations, in- Recently, there has been a flurry of interest in reviving the idea ternally tracking dependencies, and then executes the operations of compute-ahead [1, 25, 31]. -

Benchmark of C++ Libraries for Sparse Matrix Computation
Benchmark of C++ Libraries for Sparse Matrix Computation Georg Holzmann http://grh.mur.at email: [email protected] August 2007 This report presents benchmarks of C++ scientific computing libraries for small and medium size sparse matrices. Be warned: these benchmarks are very special- ized on a neural network like algorithm I had to implement. However, also the initialization time of sparse matrices and a matrix-vector multiplication was mea- sured, which might be of general interest. WARNING At the time of its writing this document did not consider the eigen library (http://eigen.tuxfamily.org). Please evaluate also this very nice, fast and well maintained library before making any decisions! See http://grh.mur.at/blog/matrix-library-benchmark-follow for more information. Contents 1 Introduction 2 2 Benchmarks 2 2.1 Initialization.....................................3 2.2 Matrix-Vector Multiplication............................4 2.3 Neural Network like Operation...........................4 3 Results 4 4 Conclusion 12 A Libraries and Flags 12 B Implementations 13 1 1 Introduction Quite a lot open-source libraries exist for scientific computing, which makes it hard to choose between them. Therefore, after communication on various mailing lists, I decided to perform some benchmarks, specialized to the kind of algorithms I had to implement. Ideally algorithms should be implemented in an object oriented, reuseable way, but of course without a loss of performance. BLAS (Basic Linear Algebra Subprograms - see [1]) and LA- PACK (Linear Algebra Package - see [3]) are the standard building blocks for efficient scientific software. Highly optimized BLAS implementations for all relevant hardware architectures are available, traditionally expressed in Fortran routines for scalar, vector and matrix operations (called Level 1, 2 and 3 BLAS). -

Using Machine Learning to Improve Dense and Sparse Matrix Multiplication Kernels
Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2019 Using machine learning to improve dense and sparse matrix multiplication kernels Brandon Groth Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Part of the Applied Mathematics Commons, and the Computer Sciences Commons Recommended Citation Groth, Brandon, "Using machine learning to improve dense and sparse matrix multiplication kernels" (2019). Graduate Theses and Dissertations. 17688. https://lib.dr.iastate.edu/etd/17688 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Using machine learning to improve dense and sparse matrix multiplication kernels by Brandon Micheal Groth A dissertation submitted to the graduate faculty in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Major: Applied Mathematics Program of Study Committee: Glenn R. Luecke, Major Professor James Rossmanith Zhijun Wu Jin Tian Kris De Brabanter The student author, whose presentation of the scholarship herein was approved by the program of study committee, is solely responsible for the content of this dissertation. The Graduate College will ensure this dissertation is globally accessible and will not permit alterations after a degree is conferred. Iowa State University Ames, Iowa 2019 Copyright c Brandon Micheal Groth, 2019. All rights reserved. ii DEDICATION I would like to dedicate this thesis to my wife Maria and our puppy Tiger. -

Anatomy of High-Performance Matrix Multiplication
Anatomy of High-Performance Matrix Multiplication KAZUSHIGE GOTO The University of Texas at Austin and ROBERT A. VAN DE GEIJN The University of Texas at Austin We present the basic principles which underlie the high-performance implementation of the matrix- matrix multiplication that is part of the widely used GotoBLAS library. Design decisions are justified by successively refining a model of architectures with multilevel memories. A simple but effective algorithm for executing this operation results. Implementations on a broad selection of architectures are shown to achieve near-peak performance. Categories and Subject Descriptors: G.4 [Mathematical Software]: —Efficiency General Terms: Algorithms;Performance Additional Key Words and Phrases: linear algebra, matrix multiplication, basic linear algebra subprogrms 1. INTRODUCTION Implementing matrix multiplication so that near-optimal performance is attained requires a thorough understanding of how the operation must be layered at the macro level in combination with careful engineering of high-performance kernels at the micro level. This paper primarily addresses the macro issues, namely how to exploit a high-performance “inner-kernel”, more so than the the micro issues related to the design and engineering of that “inner-kernel”. In [Gunnels et al. 2001] a layered approach to the implementation of matrix multiplication was reported. The approach was shown to optimally amortize the required movement of data between two adjacent memory layers of an architecture with a complex multi-level memory. Like other work in the area [Agarwal et al. 1994; Whaley et al. 2001], that paper ([Gunnels et al. 2001]) casts computation in terms of an “inner-kernel” that computes C := AB˜ + C for some mc × kc matrix A˜ that is stored contiguously in some packed format and fits in cache memory. -
DD2358 – Introduction to HPC Linear Algebra Libraries & BLAS
DD2358 – Introduction to HPC Linear Algebra Libraries & BLAS Stefano Markidis, KTH Royal Institute of Technology After this lecture, you will be able to • Understand the importance of numerical libraries in HPC • List a series of key numerical libraries including BLAS • Describe which kind of operations BLAS supports • Experiment with OpenBLAS and perform a matrix-matrix multiply using BLAS 2021-02-22 2 Numerical Libraries are the Foundation for Application Developments • While these applications are used in a wide variety of very different disciplines, their underlying computational algorithms are very similar to one another. • Application developers do not have to waste time redeveloping supercomputing software that has already been developed elsewhere. • Libraries targeting numerical linear algebra operations are the most common, given the ubiquity of linear algebra in scientific computing algorithms. 2021-02-22 3 Libraries are Tuned for Performance • Numerical libraries have been highly tuned for performance, often for more than a decade – It makes it difficult for the application developer to match a library’s performance using a homemade equivalent. • Because they are relatively easy to use and their highly tuned performance across a wide range of HPC platforms – The use of scientific computing libraries as software dependencies in computational science applications has become widespread. 2021-02-22 4 HPC Community Standards • Apart from acting as a repository for software reuse, libraries serve the important role of providing a -

Level-3 BLAS on Myriad Multi-Core Media-Processor
Level-3 BLAS on Myriad Multi-Core Media-Processor SoC Tomasz Szydzik1 Marius Farcas2 Valeriu Ohan2 David Moloney3 1Insititute for Applied Microelectronics, University of Las Palmas of Gran Canaria, 2Codecart, 3Movidius Ltd. BLAS-like Library Instantiation Subprograms (BLIS) The Myriad media-processor SoCs The Basic Linear Algebra Subprograms (BLAS) are a set of low-level subroutines that perform common linear algebra Myriad architecture prioritises power-efficient operation and area efficiency. In order to guarantee sustained high operations. BLIS is a software framework for instantiating high-performance BLAS-like dense linear algebra libraries. performance and minimise power the proprietary SHAVE (Streaming Hybrid Architecture Vector Engine) processor was BLIS[1] was chosen over GoTOBLAS, ATLAS, etc. due to its portable micro-kernel architecture and active user-base. developed. Data and Instructions reside in a shared Connection MatriX (CMX) memory block shared by all Shave processors. Data is moved between peripherals, processors and memory via a bank of software-controlled DMA engines. BLIS features Linear Algebra Myriad Acceleration DDR Controller 128/256MB LPDDR2/3 Stacked Die 128-bit AXI 128-bit AHB High-level LAPACK EIGEN In-house 128kB 2-way L2 cache (SHAVE) IISO C99 code with flexible BSD license. routines DDR Controller 1MB CMX SRAM ISupport for BLAS API calling conventions. 128-bit AXI 128-bit AHB 128-bit AHB BLIS 128-bit 64-bit 64-bit 256kB 2-way L2 cache (SHAVE) 32-bit CMX Instr CMX CMX Competitive performance [2]. Level Level Level Level APB x 8 SHAVEs I f Port Port Port 32kB LRAM 2MB CMX SRAM 0 1m 2 3 Subroutines IMulti-core friendly. -
Clearspeed Technical Training
ENVISION. ACCELERATE. ARRIVE. ClearSpeed Technical Training December 2007 Overview 1 Copyright © 2007 ClearSpeed Technology Inc. All rights reserved. www.clearspeed.com Presenters Ronald Langhi Technical Marketing Manager [email protected] Brian Sumner Senior Engineer [email protected] 2 Copyright © 2007 ClearSpeed Technology Inc. All rights reserved. www.clearspeed.com ClearSpeed Technology: Company Background • Founded in 2001 – Focused on alleviating the power, heat, and density challenges of HPC systems – 103 patents granted and pending (as of September 2007) – Offices in San Jose, California and Bristol, UK 3 Copyright © 2007 ClearSpeed Technology Inc. All rights reserved. www.clearspeed.com Agenda Accelerators ClearSpeed and HPC Hardware overview Installing hardware and software Thinking about performance Software Development Kit Application examples Help and support 4 Copyright © 2007 ClearSpeed Technology Inc. All rights reserved. www.clearspeed.com ENVISION. ACCELERATE. ARRIVE. What is an accelerator? 5 Copyright © 2007 ClearSpeed Technology Inc. All rights reserved. www.clearspeed.com What is an accelerator? • A device to improve performance – Relieve main CPU of workload – Or to augment CPU’s capability • An accelerator card can increase performance – On specific tasks – Without aggravating facility limits on clusters (power, size, cooling) 6 Copyright © 2007 ClearSpeed Technology Inc. All rights reserved. www.clearspeed.com All accelerators are good… for their intended purpose Cell and GPUs FPGAs •Good for video gaming tasks •Good for integer, bit-level ops •32-bit FLOPS, not IEEE •Programming looks like circuit design •Unconventional programming model •Low power per chip, but •Small local memory 20x more power than custom VLSI •High power consumption (> 200 W) •Not for 64-bit FLOPS ClearSpeed •Good for HPC applications •IEEE 64-bit and 32-bit FLOPS •Custom VLSI, true coprocessor •At least 1 GB local memory •Very low power consumption (25 W) •Familiar programming model 7 Copyright © 2007 ClearSpeed Technology Inc. -

A Framework for Efficient Execution of Matrix Computations
A Framework for Efficient Execution of Matrix Computations Doctoral Thesis May 2006 Jos´e Ram´on Herrero Advisor: Prof. Juan J. Navarro UNIVERSITAT POLITECNICA` DE CATALUNYA Departament D'Arquitectura de Computadors To Joan and Albert my children To Eug`enia my wife To Ram´on and Gloria my parents Stillicidi casus lapidem cavat Lucretius (c. 99 B.C.-c. 55 B.C.) De Rerum Natura1 1Continual dropping wears away a stone. Titus Lucretius Carus. On the nature of things Abstract Matrix computations lie at the heart of most scientific computational tasks. The solution of linear systems of equations is a very frequent operation in many fields in science, engineering, surveying, physics and others. Other matrix op- erations occur frequently in many other fields such as pattern recognition and classification, or multimedia applications. Therefore, it is important to perform matrix operations efficiently. The work in this thesis focuses on the efficient execution on commodity processors of matrix operations which arise frequently in different fields. We study some important operations which appear in the solution of real world problems: some sparse and dense linear algebra codes and a classification algorithm. In particular, we focus our attention on the efficient execution of the following operations: sparse Cholesky factorization; dense matrix multipli- cation; dense Cholesky factorization; and Nearest Neighbor Classification. A lot of research has been conducted on the efficient parallelization of nu- merical algorithms. However, the efficiency of a parallel algorithm depends ultimately on the performance obtained from the computations performed on each node. The work presented in this thesis focuses on the sequential execution on a single processor. -

TSUBAME---A Year Later
1 TSUBAME---A Year Later Satoshi Matsuoka, Professor/Dr.Sci. Global Scientific Information and Computing Center Tokyo Inst. Technology & NAREGI Project National Inst. Informatics EuroPVM/MPI, Paris, France, Oct. 2, 2007 2 Topics for Today •Intro • Upgrades and other New stuff • New Programs • The Top 500 and Acceleration • Towards TSUBAME 2.0 The TSUBAME Production 3 “Supercomputing Grid Cluster” Spring 2006-2010 Voltaire ISR9288 Infiniband 10Gbps Sun Galaxy 4 (Opteron Dual x2 (DDR next ver.) core 8-socket) ~1310+50 Ports “Fastest ~13.5Terabits/s (3Tbits bisection) Supercomputer in 10480core/655Nodes Asia, 29th 21.4Terabytes 10Gbps+External 50.4TeraFlops Network [email protected] OS Linux (SuSE 9, 10) Unified IB NAREGI Grid MW network NEC SX-8i (for porting) 500GB 500GB 48disks 500GB 48disks 48disks Storage 1.5PB 1.0 Petabyte (Sun “Thumper”) ClearSpeed CSX600 0.1Petabyte (NEC iStore) SIMD accelerator Lustre FS, NFS, CIF, WebDAV (over IP) 360 boards, 70GB/s 50GB/s aggregate I/O BW 35TeraFlops(Current)) 4 Titech TSUBAME ~76 racks 350m2 floor area 1.2 MW (peak) 5 Local Infiniband Switch (288 ports) Node Rear Currently 2GB/s / node Easily scalable to 8GB/s / node Cooling Towers (~32 units) ~500 TB out of 1.1PB 6 TSUBAME assembled like iPod… NEC: Main Integrator, Storage, Operations SUN: Galaxy Compute Nodes, Storage, Solaris AMD: Opteron CPU Voltaire: Infiniband Network ClearSpeed: CSX600 Accel. CFS: Parallel FSCFS Novell: Suse 9/10 NAREGI: Grid MW Titech GSIC: us UK Germany AMD:Fab36 USA Israel Japan 7 TheThe racksracks werewere readyready -

Introduction Hardware Acceleration Philosophy Popular Accelerators In
Special Purpose Accelerators Special Purpose Accelerators Introduction Recap: General purpose processors excel at various jobs, but are no Theme: Towards Reconfigurable High-Performance Computing mathftch for acce lera tors w hen dea ling w ith spec ilidtialized tas ks Lecture 4 Objectives: Platforms II: Special Purpose Accelerators Define the role and purpose of modern accelerators Provide information about General Purpose GPU computing Andrzej Nowak Contents: CERN openlab (Geneva, Switzerland) Hardware accelerators GPUs and general purpose computing on GPUs Related hardware and software technologies Inverted CERN School of Computing, 3-5 March 2008 1 iCSC2008, Andrzej Nowak, CERN openlab 2 iCSC2008, Andrzej Nowak, CERN openlab Special Purpose Accelerators Special Purpose Accelerators Hardware acceleration philosophy Popular accelerators in general Floating point units Old CPUs were really slow Embedded CPUs often don’t have a hardware FPU 1980’s PCs – the FPU was an optional add on, separate sockets for the 8087 coprocessor Video and image processing MPEG decoders DV decoders HD decoders Digital signal processing (including audio) Sound Blaster Live and friends 3 iCSC2008, Andrzej Nowak, CERN openlab 4 iCSC2008, Andrzej Nowak, CERN openlab Towards Reconfigurable High-Performance Computing Lecture 4 iCSC 2008 3-5 March 2008, CERN Special Purpose Accelerators 1 Special Purpose Accelerators Special Purpose Accelerators Mainstream accelerators today Integrated FPUs Realtime graphics GiGaming car ds Gaming physics