Process Synchronization
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Synchronization Spinlocks - Semaphores
CS 4410 Operating Systems Synchronization Spinlocks - Semaphores Summer 2013 Cornell University 1 Today ● How can I synchronize the execution of multiple threads of the same process? ● Example ● Race condition ● Critical-Section Problem ● Spinlocks ● Semaphors ● Usage 2 Problem Context ● Multiple threads of the same process have: ● Private registers and stack memory ● Shared access to the remainder of the process “state” ● Preemptive CPU Scheduling: ● The execution of a thread is interrupted unexpectedly. ● Multiple cores executing multiple threads of the same process. 3 Share Counting ● Mr Skroutz wants to count his $1-bills. ● Initially, he uses one thread that increases a variable bills_counter for every $1-bill. ● Then he thought to accelerate the counting by using two threads and keeping the variable bills_counter shared. 4 Share Counting bills_counter = 0 ● Thread A ● Thread B while (machine_A_has_bills) while (machine_B_has_bills) bills_counter++ bills_counter++ print bills_counter ● What it might go wrong? 5 Share Counting ● Thread A ● Thread B r1 = bills_counter r2 = bills_counter r1 = r1 +1 r2 = r2 +1 bills_counter = r1 bills_counter = r2 ● If bills_counter = 42, what are its possible values after the execution of one A/B loop ? 6 Shared counters ● One possible result: everything works! ● Another possible result: lost update! ● Called a “race condition”. 7 Race conditions ● Def: a timing dependent error involving shared state ● It depends on how threads are scheduled. ● Hard to detect 8 Critical-Section Problem bills_counter = 0 ● Thread A ● Thread B while (my_machine_has_bills) while (my_machine_has_bills) – enter critical section – enter critical section bills_counter++ bills_counter++ – exit critical section – exit critical section print bills_counter 9 Critical-Section Problem ● The solution should ● enter section satisfy: ● critical section ● Mutual exclusion ● exit section ● Progress ● remainder section ● Bounded waiting 10 General Solution ● LOCK ● A process must acquire a lock to enter a critical section. -

Synchronization: Locks
Last Class: Threads • Thread: a single execution stream within a process • Generalizes the idea of a process • Shared address space within a process • User level threads: user library, no kernel context switches • Kernel level threads: kernel support, parallelism • Same scheduling strategies can be used as for (single-threaded) processes – FCFS, RR, SJF, MLFQ, Lottery... Computer Science CS377: Operating Systems Lecture 5, page 1 Today: Synchronization • Synchronization – Mutual exclusion – Critical sections • Example: Too Much Milk • Locks • Synchronization primitives are required to ensure that only one thread executes in a critical section at a time. Computer Science CS377: Operating Systems Lecture 7, page 2 Recap: Synchronization •What kind of knowledge and mechanisms do we need to get independent processes to communicate and get a consistent view of the world (computer state)? •Example: Too Much Milk Time You Your roommate 3:00 Arrive home 3:05 Look in fridge, no milk 3:10 Leave for grocery store 3:15 Arrive home 3:20 Arrive at grocery store Look in fridge, no milk 3:25 Buy milk Leave for grocery store 3:35 Arrive home, put milk in fridge 3:45 Buy milk 3:50 Arrive home, put up milk 3:50 Oh no! Computer Science CS377: Operating Systems Lecture 7, page 3 Recap: Synchronization Terminology • Synchronization: use of atomic operations to ensure cooperation between threads • Mutual Exclusion: ensure that only one thread does a particular activity at a time and excludes other threads from doing it at that time • Critical Section: piece of code that only one thread can execute at a time • Lock: mechanism to prevent another process from doing something – Lock before entering a critical section, or before accessing shared data. -

Concurrent Objects and Linearizability Concurrent Computaton
Concurrent Objects and Concurrent Computaton Linearizability memory Nir Shavit Subing for N. Lynch object Fall 2003 object © 2003 Herlihy and Shavit 2 Objectivism FIFO Queue: Enqueue Method • What is a concurrent object? q.enq( ) – How do we describe one? – How do we implement one? – How do we tell if we’re right? © 2003 Herlihy and Shavit 3 © 2003 Herlihy and Shavit 4 FIFO Queue: Dequeue Method Sequential Objects q.deq()/ • Each object has a state – Usually given by a set of fields – Queue example: sequence of items • Each object has a set of methods – Only way to manipulate state – Queue example: enq and deq methods © 2003 Herlihy and Shavit 5 © 2003 Herlihy and Shavit 6 1 Pre and PostConditions for Sequential Specifications Dequeue • If (precondition) – the object is in such-and-such a state • Precondition: – before you call the method, – Queue is non-empty • Then (postcondition) • Postcondition: – the method will return a particular value – Returns first item in queue – or throw a particular exception. • Postcondition: • and (postcondition, con’t) – Removes first item in queue – the object will be in some other state • You got a problem with that? – when the method returns, © 2003 Herlihy and Shavit 7 © 2003 Herlihy and Shavit 8 Pre and PostConditions for Why Sequential Specifications Dequeue Totally Rock • Precondition: • Documentation size linear in number –Queue is empty of methods • Postcondition: – Each method described in isolation – Throws Empty exception • Interactions among methods captured • Postcondition: by side-effects -

INF4140 - Models of Concurrency Locks & Barriers, Lecture 2
Locks & barriers INF4140 - Models of concurrency Locks & barriers, lecture 2 Høsten 2015 31. 08. 2015 2 / 46 Practical Stuff Mandatory assignment 1 (“oblig”) Deadline: Friday September 25 at 18.00 Online delivery (Devilry): https://devilry.ifi.uio.no 3 / 46 Introduction Central to the course are general mechanisms and issues related to parallel programs Previously: await language and a simple version of the producer/consumer example Today Entry- and exit protocols to critical sections Protect reading and writing to shared variables Barriers Iterative algorithms: Processes must synchronize between each iteration Coordination using flags 4 / 46 Remember: await-example: Producer/Consumer 1 2 i n t buf, p := 0; c := 0; 3 4 process Producer { process Consumer { 5 i n t a [N ] ; . i n t b [N ] ; . 6 w h i l e ( p < N) { w h i l e ( c < N) { 7 < await ( p = c ) ; > < await ( p > c ) ; > 8 buf:=a[p]; b[c]:=buf; 9 p:=p+1; c:=c+1; 10 }} 11 }} Invariants An invariant holds in all states in all histories of the program. global invariant: c ≤ p ≤ c + 1 local (in the producer): 0 ≤ p ≤ N 5 / 46 Critical section Fundamental concept for concurrency Critical section: part of a program that is/needs to be “protected” against interference by other processes Execution under mutual exclusion Related to “atomicity” Main question today: How can we implement critical sections / conditional critical sections? Various solutions and properties/guarantees Using locks and low-level operations SW-only solutions? HW or OS support? Active waiting (later semaphores and passive waiting) 6 / 46 Access to Critical Section (CS) Several processes compete for access to a shared resource Only one process can have access at a time: “mutual exclusion” (mutex) Possible examples: Execution of bank transactions Access to a printer or other resources .. -
Computer Science 322 Operating Systems Topic Notes: Process
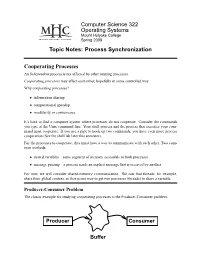
Computer Science 322 Operating Systems Mount Holyoke College Spring 2008 Topic Notes: Process Synchronization Cooperating Processes An Independent process is not affected by other running processes. Cooperating processes may affect each other, hopefully in some controlled way. Why cooperating processes? • information sharing • computational speedup • modularity or convenience It’s hard to find a computer system where processes do not cooperate. Consider the commands you type at the Unix command line. Your shell process and the process that executes your com- mand must cooperate. If you use a pipe to hook up two commands, you have even more process cooperation (See the shell lab later this semester). For the processes to cooperate, they must have a way to communicate with each other. Two com- mon methods: • shared variables – some segment of memory accessible to both processes • message passing – a process sends an explicit message that is received by another For now, we will consider shared-memory communication. We saw that threads, for example, share their global context, so that is one way to get two processes (threads) to share a variable. Producer-Consumer Problem The classic example for studying cooperating processes is the Producer-Consumer problem. Producer Consumer Buffer CS322 OperatingSystems Spring2008 One or more produces processes is “producing” data. This data is stored in a buffer to be “con- sumed” by one or more consumer processes. The buffer may be: • unbounded – We assume that the producer can continue producing items and storing them in the buffer at all times. However, the consumer must wait for an item to be inserted into the buffer before it can take one out for consumption. -

4. Process Synchronization
Lecture Notes for CS347: Operating Systems Mythili Vutukuru, Department of Computer Science and Engineering, IIT Bombay 4. Process Synchronization 4.1 Race conditions and Locks • Multiprogramming and concurrency bring in the problem of race conditions, where multiple processes executing concurrently on shared data may leave the shared data in an undesirable, inconsistent state due to concurrent execution. Note that race conditions can happen even on a single processor system, if processes are context switched out by the scheduler, or are inter- rupted otherwise, while updating shared data structures. • Consider a simple example of two threads of a process incrementing a shared variable. Now, if the increments happen in parallel, it is possible that the threads will overwrite each other’s result, and the counter will not be incremented twice as expected. That is, a line of code that increments a variable is not atomic, and can be executed concurrently by different threads. • Pieces of code that must be accessed in a mutually exclusive atomic manner by the contending threads are referred to as critical sections. Critical sections must be protected with locks to guarantee the property of mutual exclusion. The code to update a shared counter is a simple example of a critical section. Code that adds a new node to a linked list is another example. A critical section performs a certain operation on a shared data structure, that may temporar- ily leave the data structure in an inconsistent state in the middle of the operation. Therefore, in order to maintain consistency and preserve the invariants of shared data structures, critical sections must always execute in a mutually exclusive fashion. -

The Critical Section Problem Problem Description
The Critical Section Problem Problem Description Informally, a critical section is a code segment that accesses shared variables and has to be executed as an atomic action. The critical section problem refers to the problem of how to ensure that at most one process is executing its critical section at a given time. Important: Critical sections in different threads are not necessarily the same code segment! Concurrent Software Systems 2 1 Problem Description Formally, the following requirements should be satisfied: Mutual exclusion: When a thread is executing in its critical section, no other threads can be executing in their critical sections. Progress: If no thread is executing in its critical section, and if there are some threads that wish to enter their critical sections, then one of these threads will get into the critical section. Bounded waiting: After a thread makes a request to enter its critical section, there is a bound on the number of times that other threads are allowed to enter their critical sections, before the request is granted. Concurrent Software Systems 3 Problem Description In discussion of the critical section problem, we often assume that each thread is executing the following code. It is also assumed that (1) after a thread enters a critical section, it will eventually exit the critical section; (2) a thread may terminate in the non-critical section. while (true) { entry section critical section exit section non-critical section } Concurrent Software Systems 4 2 Solution 1 In this solution, lock is a global variable initialized to false. A thread sets lock to true to indicate that it is entering the critical section. -

Rtos Implementation of Non-Linear System Using Multi Tasking, Scheduling and Critical Section
Journal of Computer Science 10 (11): 2349-2357, 2014 ISSN: 1549-3636 © 2014 M. Sujitha et al ., This open access article is distributed under a Creative Commons Attribution (CC-BY) 3.0 license doi:10.3844/jcssp.2014.2349.2357 Published Online 10 (11) 2014 (http://www.thescipub.com/jcs.toc) RTOS IMPLEMENTATION OF NON-LINEAR SYSTEM USING MULTI TASKING, SCHEDULING AND CRITICAL SECTION 1Sujitha, M., 2V. Kannan and 3S. Ravi 1,3 Department of ECE, Dr. M.G.R. Educational and Research Institute University, Chennai, India 2Jeppiaar Institute of Technology, Kanchipuram, India Received 2014-04-21; Revised 2014-07-19; Accepted 2014-12-16 ABSTRACT RTOS based embedded systems are designed with priority based multiple tasks. Inter task communication and data corruptions are major constraints in multi-tasking RTOS system. This study we describe about the solution for these issues with an example Real-time Liquid level control system. Message queue and Mail box are used to perform inter task communication to improve the task execution time and performance of the system. Critical section scheduling is used to eliminate the data corruption. In this application process value monitoring is considered as critical. In critical section the interrupt disable time is the most important specification of a real time kernel. RTOS is used to keep the interrupt disable time to a minimum. The algorithm is studied with respect to task execution time and response of the interrupts. The study also presents the comparative analysis of the system with critical section and without critical section based on the performance metrics. Keywords: Critical Section, RTOS, Scheduling, Resource Sharing, Mailbox, Message Queue 1. -

Shared Memory Programming Models I
Shared Memory Programming Models I Stefan Lang Interdisciplinary Center for Scientific Computing (IWR) University of Heidelberg INF 368, Room 532 D-69120 Heidelberg phone: 06221/54-8264 email: [email protected] WS 14/15 Stefan Lang (IWR) Simulation on High-Performance Computers WS14/15 1/45 Shared Memory Programming Models I Communication by shared memory Critical section Mutual exclusion: Petersons algorithm OpenMP Barriers – Synchronisation of all processes Semaphores Stefan Lang (IWR) Simulation on High-Performance Computers WS14/15 2/45 Critical Section What is a critical section? We consider the following situation: Application consists of P concurrent processes, these are thus executed simultaneously instructions executed by one process are subdivided into interconnected groups ◮ critical sections ◮ uncritical sections Critical section: Sequence of instructions, that perform a read or write access on a shared variable. Instructions of a critical section that may not be performed simultaneously by two or more processes. → it is said only a single process may reside within the critical section. Stefan Lang (IWR) Simulation on High-Performance Computers WS14/15 3/45 Mutual Exclusion I 2 Types of synchronization can be distinguished Conditional synchronisation Mutual exclusion Mutual exclusion consists of an entry protocol and an exit protocol: Programm (Introduction of mutual exclusion) parallel critical-section { process Π[int p ∈{0,..., P − 1}] { while (1) { entry protocol; critical section; exit protocol; uncritical section; } } } Stefan Lang (IWR) Simulation on High-Performance Computers WS14/15 4/45 Mutual Exclusion II The following criteria have to be matched: 1 Mutual exclusion. At most one process executed the critical section at a time. -

Spinlock Vs. Sleeping Lock Spinlock Implementation(1)
Semaphores EECS 3221.3 • Problems with the software solutions. Operating System Fundamentals – Complicated programming, not flexible to use. – Not easy to generalize to more complex synchronization problems. No.6 • Semaphore (a.k.a. lock): an easy-to-use synchronization tool – An integer variable S Process Synchronization(2) – wait(S) { while (S<=0) ; S-- ; Prof. Hui Jiang } Dept of Electrical Engineering and Computer – signal(S) { Science, York University S++ ; } Semaphore usage (1): Semaphore usage (2): the n-process critical-section problem as a General Synchronization Tool • The n processes share a semaphore, Semaphore mutex ; // mutex is initialized to 1. • Execute B in Pj only after A executed in Pi • Use semaphore flag initialized to 0 Process Pi do { " wait(mutex);! Pi Pj " critical section of Pi! ! … … signal(mutex);" A wait (flag) ; signal (flag) ; B remainder section of Pi ! … … ! } while (1);" " " Spinlock vs. Sleeping Lock Spinlock Implementation(1) • In uni-processor machine, disabling interrupt before modifying • Previous definition of semaphore requires busy waiting. semaphore. – It is called spinlock. – spinlock does not need context switch, but waste CPU cycles wait(S) { in a continuous loop. do { – spinlock is OK only for lock waiting is very short. Disable_Interrupt; signal(S) { • Semaphore without busy-waiting, called sleeping lock: if(S>0) { S-- ; Disable_Interrupt ; – In defining wait(), rather than busy-waiting, the process makes Enable_Interrupt ; S++ ; system calls to block itself and switch to waiting state, and return ; Enable_Interrupt ; put the process to a waiting queue associated with the } return ; semaphore. The control is transferred to CPU scheduler. Enable_Interrupt ; } – In defining signal(), the process makes system calls to pick a } while(1) ; process in the waiting queue of the semaphore, wake it up by } moving it to the ready queue to wait for CPU scheduling. -
Processes and Threads
Interprocess Communication Yücel Saygın |These slides are based on your text book and on the slides prepared by Andrew S. Tanenbaum 1 Inter-process Communication • Race Conditions: two or more processes are reading and writing on shared data and the final result depends on who runs precisely when • Mutual exclusion : making sure that if one process is accessing a shared memory, the other will be excluded form doing the same thing • Critical region: the part of the program where shared variables are accessed 2 Interprocess Communication Race Conditions Two processes want to access shared memory at same time 3 Critical Regions (1) Four conditions to provide mutual exclusion 1. No two processes simultaneously in critical region 2. No assumptions made about speeds or numbers of CPUs 3. No process running outside its critical region may block another process 4. No process must wait forever to enter its critical region 4 Critical Regions (2) Mutual exclusion using critical regions 5 Mutual Exclusion via Disabling Interrupts • Process disables all interrupts before entering its critical region • Enables all interrupts just before leaving its critical region • CPU is switched from one process to another only via clock or other interrupts • So disabling interrupts guarantees that there will be no process switch • Disadvantage: – Should give the power to control interrupts to user (what if a user turns off the interrupts and never turns them on again?) – Does not work in case of multiple CPUs. Only the CPU that executes the disable instruction is effected. • Not suitable approach for the general case but can be used by the Kernel when needed 6 Mutual Exclusion with Busy Waiting: (1)Lock Variables • Testing a variable until some value appears is called busy waiting. -

Semaphores (Dijkstra 1965)
Semaphores (Dijkstra 1965) n Semaphores have a non-negative integer value, and support two operations: n semaphore->P(): an atomic operation that waits for semaphore Semaphores & Monitors to become positive, then decrements it by 1 n semaphore->V(): an atomic operation that increments semaphore by 1, waking up a waiting P, if any. n Semaphores are like integers except: Arvind Krishnamurthy (1) non-negative values; Spring 2004 (2) only allow P&V --- can’t read/write value except to set it initially; (3) operations must be atomic: -- two P’s that occur together can’t decrement the value below zero. -- thread going to sleep in P won’t miss wakeup from V, even if they both happen at about the same time. Implementing semaphores Using interrupts P means “test” (proberen in Dutch) V means “increment” (verhogen in Dutch) class Semaphore { int value = 0; } n Binary semaphores: Semaphore::P() { n Like a lock; can only have value 0 or 1 (unlike the previous Disable interrupts; Semaphore::V() { “counting semaphore” which can be any non-negative integers) while (value == 0) { Disable interrupts; Enable interrupts; value++; Disable interrupts; Enable interrupts; } } n How to implement semaphores? Standard tricks: value = value - 1; Enable interrupts; n Can be built using interrupts disable/enable } n Or using test-and-set n Use a queue to prevent unnecessary busy-waiting n Question: Can we build semaphores using just locks? Using test&set How to use semaphores n Binary semaphores can be used for mutual exclusion: class Semaphore { int value = 0; initial value of 1; P() is called before the critical section; and V() is called after the int guard = 0; } critical section.