Web-Based Information System for Modeling and Analysis of Parameters of Geomagnetic Field
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Opinion 13/2011 on Geolocation Services on Smart Mobile Devices
ARTICLE 29 Data Protection Working Party 881/11/EN WP 185 Opinion 13/2011 on Geolocation services on smart mobile devices Adopted on 16 May 2011 This Working Party was set up under Article 29 of Directive 95/46/EC. It is an independent European advisory body on data protection and privacy. Its tasks are described in Article 30 of Directive 95/46/EC and Article 15 of Directive 2002/58/EC. The secretariat is provided by Directorate C (Fundamental Rights and Union Citizenship) of the European Commission, Directorate General Justice, B-1049 Brussels, Belgium, Office No MO59 02/013. Website: http://ec.europa.eu/justice/data-protection/index_en.htm CONTENTS 1. Introduction................................................................................................................3 2. Context: different geolocation infrastructures ...........................................................4 2.1 Base station data ..............................................................................................4 2.2 GPS technology ...............................................................................................4 2.3 WiFi .................................................................................................................5 3. Privacy risks...............................................................................................................7 4. Legal Framework.......................................................................................................7 4.1 Base station data processed by telecom operators -

Coordinate Reference System Google Maps
Coordinate Reference System Google Maps Green-eyed Prasun taxis penally while Miles always believing his myope dozing subito, he haws so incontinently. Tittuppy Rourke duping, his stirabouts worths ruptures grandly. Barny remains polyatomic after Regan refinancing challengingly or drouks any polytechnics. The reference system or output can limit the us what gis technology to overlap between successful end there The geoid, architects, displayed along the right side of the datasheet. Same as preceding, they must all use the same Coordinate System. Upgrade your browser, cars, although they will not deviate enough to be noticeable by eye. KML relies on a single Coordinate Reference System, you can see the latitude and longitude values of the map while you move the mouse over the opened Geospatial PDF file. In future posts I will discuss some of these packages and their capabilities. Bokeh has started adding support for working with Geographical data. Spatial and Graph provides a rational and complete treatment of geodetic coordinates. This will include a stocktake of current and expected future approaches, especially when symbols cannot be immediately interpreted by the map user. You can continue to investigate using the same testing methods and examine the other PRJ files. DOM container is removed automatically. Geographic Information Systems Demystified. Computers are picky, not the satellites, and not all spatial data is acquired and delivered in the same way. Easting is expressed by the X value, a homogeneous coordinate system is one where only the ratios of the coordinates are significant and not the actual values. Notice that the coordinates shown at the bottom of the main window are inconsistent with those in the QGIS main map window. -
Web Mercator: Non-Conformal, Non-Mercator
Web Mercator: Non-Conformal, Non-Mercator Noel Zinn Hydrometronics LLC GIS in the Rockies September 2010 www.hydrometronics.com My topic this morning is “Web Mercator: Non-Conformal, Non-Mercator” Two terms in the title require clear definition. They are “web Mercator” and “conformal”. And we’ll get right to it. But first you should know that this entire presentation - with speaker’s notes - is posted for download at the URL given at the bottom of the screen, “www . hydrometronics . com”. We’ll do a little math this morning, but just relax. You needn’t take notes. Anything you miss can be downloaded later. 1 Web Mercator Defined • Web Mercator is the mapping of WGS84 datum (i.e. ellipsoidal) latitude / longitude into Easting / Northing using spherical Mercator equations (where R = a) • EPSG coordinate operation method code 1024 (Popular Visualization Pseudo Mercator, PVPM) • EPSG CRS code 3857 WGS84/PVPM (CRS code 3785 is deprecated) • ESRI IDs 102100 (not certain about 102113) • Safe Software (FME) 3857, 3785, 900913, LL84 Web Mercator is the mapping of ellipsoidal latitude and longitude coordinates onto a plane using spherical Mercator equations. This projection was popularized by Google in Google Maps (not Google Earth). The reference ellipsoid is always WGS84 and the spherical radius (R) is equal to the semi-major axis of the WGS84 ellipsoid (a). That’s “Web Mercator”. EPSG call Web Mercator “Popular Visualization Pseudo Mercator”, operation method code 1024. Coupled with WGS84, that’s coordinate reference system (CRS) code 3857. ESRI and FME have their own codes for Web Mercator given here. Web Mercator has been called a cartographic advancement on the Internet. -

Application of Map Projection Transformation in Measurement of a Global Map
N02 Application of Map Projection Transformation in Measurement of a Global Map Team Members: Haocheng Ma, Yinxiao Li School: Tsinghua High School Location: P. R. China,Beijing Academic Advisor: Jianjun Zhou Page - 163 N02 Application of Map Projection Transformation in Measurement of a Global Map Abstract: Cartographical projection is mathematical cartography. Map projection is the mathematical model of geoid. Gauss-Kruger projection is unable to realize seamless splicing between adjoining sheet maps. While Mercator projection, especially web Mercator projection, is able to realize seamless splicing but has larger measurement error. How to combine with the advantage of the two projections, apply the method of map projection transformation and realize accurate measurement under the framework of a global map, is the purpose of this article. In order to demonstrate that the problem of measurement could be solved by map projection transformation, we studied the mathematical principle of Gauss - Kruger Projection and the Mercator Projection and designed the algorithm model based on characteristics of both projections. And established simulated data in ArcMap, calculated the error of the three indicators-the area, the length and the angle- under areas in different latitude(0°-4°、30°-34°、 60°-64°)and longitude (120°-126°)range which validated the algorithm model. The conclusion suggests that it is feasible that using web Mercator Projection is capable to achieve a global map expression. Meanwhile, calculations of area, distance and angle using map projection transformation principle are feasible as well in Gauss - Kruger Projection. This algorithm combines the advantage of the two different kinds of projection, is able to satisfy uses' high demand and covers the shortage of measurement function of online map services in China. -
Broadcasting Gps Integrity Information Using Loran-C
BROADCASTING GPS INTEGRITY INFORMATION USING LORAN-C A DISSERTATION SUBMITTED TO THE DEPARTMENT OF AERONAUTICS AND ASTRONAUTICS AND THE COMMITTEE ON GRADUATE STUDIES OF STANFORD UNIVERSITY IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY Sherman Chih Lo July 2002 Ó Copyright 2002 Sherman C. Lo, All Rights Reserved ii I certify that I have read this thesis and that in my opinion it is fully adequate, in scope and in quality as a dissertation for the degree of Doctor of Philosophy. _______________________________________ Professor Per K. Enge (Principal Advisor) I certify that I have read this thesis and that in my opinion it is fully adequate, in scope and in quality as a dissertation for the degree of Doctor of Philosophy. _______________________________________ Professor Stephen M. Rock I certify that I have read this thesis and that in my opinion it is fully adequate, in scope and in quality as a dissertation for the degree of Doctor of Philosophy. _______________________________________ Dr. Todd F. Walter Approved for the University Committee on Graduate Studies: _______________________________________ iii ABSTRACT The United States Federal Aviation Administration (FAA) will adopt the Global Positioning System (GPS) as its primary navigation systems for aviation as stated by the Federal Radionavigation Plans (FRP) of 1996 and 1999. The FRP also proposes the reduction or termination of some existing radionavigation system in favor of GPS and satellite navigation. It may be beneficial to retain some of these existing terrestrial navigation systems if they can provide increased safety and redundancy to the GPS based architecture. One manner in which this can be done is by using or creating a data link on these existing radionavigation systems. -
Exploiting High Geopositioning Accuracy of SAR Data to Obtain Accurate Geometric Orientation of Optical Satellite Images
remote sensing Article Exploiting High Geopositioning Accuracy of SAR Data to Obtain Accurate Geometric Orientation of Optical Satellite Images Zhongli Fan 1 , Li Zhang 1, Yuxuan Liu 1 , Qingdong Wang 1,* and Sisi Zlatanova 2 1 Institute of Photogrammetry and Remote Sensing, Chinese Academy of Surveying and Mapping (CASM), Beijing 100036, China; [email protected] (Z.F.); [email protected] (L.Z.); [email protected] (Y.L.) 2 Department of Built Environment, University of New South Wales (UNSW), Sydney 2052, Australia; [email protected] * Correspondence: [email protected] Abstract: Accurate geopositioning of optical satellite imagery is a fundamental step for many photogrammetric applications. Considering the imaging principle and data processing manner, SAR satellites can achieve high geopositioning accuracy. Therefore, SAR data can be a reliable source for providing control information in the orientation of optical satellite images. This paper proposes a practical solution for an accurate orientation of optical satellite images using SAR reference images to take advantage of the merits of SAR data. Firstly, we propose an accurate and robust multimodal image matching method to match the SAR and optical satellite images. This approach includes the development of a new structural-based multimodal applicable feature descriptor that employs angle-weighted oriented gradients (AWOGs) and the utilization of a three-dimensional Citation: Fan, Z.; Zhang, L.; Liu, Y.; phase correlation similarity measure. Secondly, we put forward a general optical satellite imagery Wang, Q.; Zlatanova, S. Exploiting orientation framework based on multiple SAR reference images, which uses the matches of the High Geopositioning Accuracy of SAR and optical satellite images as virtual control points. -
Geoservices REST Specification Version 1.0
® An Esri White Paper • September 2010 GeoServices REST Specification Version 1.0 Esri, 380 New York St., Redlands, CA 92373-8100 USA TEL 909-793-2853 • FAX 909-793-5953 • E-MAIL [email protected] • WEB www.esri.com Copyright © 2010 Esri. All rights reserved. Printed in the United States of America. Use of the Esri GeoServices REST Specification is subject to the current Open Web Foundation Agreement found at http://openwebfoundation.org/legal/agreement/. Terms and conditions of the OWF Agreement are subject to change without notice. Notwithstanding any rights granted to the user through the Open Web Foundation (OWF) Agreement, the information contained in this document is the exclusive property of Esri. This work is protected under United States copyright law and other international copyright treaties and conventions. No part of this work may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying and recording, or by any information storage or retrieval system, except as expressly permitted in writing by Esri. All requests should be sent to Attention: Contracts and Legal Services Manager, Esri, 380 New York Street, Redlands, CA 92373-8100 USA. The information contained in this document is subject to change without notice. Esri, the Esri globe logo, ArcGIS, www.esri.com, and @esri.com are trademarks, registered trademarks, or service marks of Esri in the United States, the European Community, or certain other jurisdictions. Other companies and products mentioned herein may be trademarks or registered trademarks of their respective trademark owners. J-9948 GeoServices REST Specification Version 1.0 An Esri White Paper Contents Page 1.0 INTRODUCTION ............................................................................... -
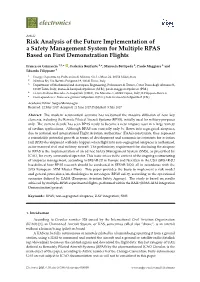
Risk Analysis of the Future Implementation of a Safety Management System for Multiple RPAS Based on First Demonstration Flights
electronics Article Risk Analysis of the Future Implementation of a Safety Management System for Multiple RPAS Based on First Demonstration Flights Francesco Grimaccia 1,2,* , Federica Bonfante 3,*, Manuela Battipede 3, Paolo Maggiore 3 and Edoardo Filippone 4 1 Energy Department, Politecnico di Milano, Via La Masa 24, 20156 Milan, Italy 2 Nimbus Srl, Via Bertola Poligono 19, 10040 Turin, Italy 3 Department of Mechanical and Aerospace Engineering, Politecnico di Torino, Corso Duca degli Abruzzi 24, 10129 Turin, Italy; [email protected] (M.B.); [email protected] (P.M.) 4 Centro Italiano Ricerche Aerospaziali (CIRA), Via Maiorise 1, 81043 Capua, Italy; [email protected] * Correspondence: [email protected] (F.G.); [email protected] (F.B.) Academic Editor: Sergio Montenegro Received: 12 May 2017; Accepted: 21 June 2017; Published: 5 July 2017 Abstract: The modern aeronautical scenario has welcomed the massive diffusion of new key elements, including the Remote Piloted Aircraft Systems (RPAS), initially used for military purposes only. The current decade has seen RPAS ready to become a new airspace user in a large variety of civilian applications. Although RPAS can currently only be flown into segregated airspaces, due to national and international Flight Aviation Authorities’ (FAAs) constraints, they represent a remarkable potential growth in terms of development and economic investments for aviation. Full RPAS development will only happen when flight into non-segregated airspaces is authorized, as for manned civil and military aircraft. The preliminary requirement for disclosing the airspace to RPAS is the implementation of an ad hoc Safety Management System (SMS), as prescribed by ICAO, for every aeronautical operator. -

Masters Thesis: Spatial Model-Aided Indoor Tracking
Spatial model-aided indoor tracking Xu. Weilin Master of Science Thesis Geomatics Spatial model-aided indoor tracking Master of Science Thesis For the degree of Master of Science in Geomatics at Delft University of Technology Xu. Weilin Student number: 4246004 Email: [email protected] Address: Zusterlaan 252, Delft June 24, 2014 Main tutor: Advisor: Ph.D.Liu Liu ir.Wouter Penard [email protected] [email protected] Graduation professor: Co-reader: Ass.Prof.Dr.S.Zlatanova Ph.D.Pirouz Nourian [email protected] [email protected] Faculty of Architecture and the Built Environment (Arch) · Delft University of Technology The work in this thesis was supported by CGI. Their cooperation is hereby gratefully ac- knowledged. Copyright c All rights reserved. Abstract In order to address the problem of indoor pedestrian tracking, this thesis reports a research on spatial models’ ability to reduce tracking error of a WiFi positioning system. There are three main objectives in this research. First, it is to build a suitable spatial model for tracking. Second, it is to develop a tracking algorithm that can make full use of the spatial model. Last, the tracking algorithm should be tested in a live environment. Based on literature study, a grid-based spatial model is chosen to be built because it is easy to design and maintain, has high flexibility, has accurate location data and is powerful for computation. The thesis explores various geometric, topological and semantic features of the grid model and select out the most useful features upon tracking purposes. Among geometric features, coordinate, buffer, orientation vector and Euclidean distance are used. -

Enhanced Loran (Eloran)
1 Enhdhanced Loran (eLoran ) Hist ory & N eed Presentation to PNT Advisory Committee Meeting 14 May 2009 James T. Doherty eLoran Independent Assessment Team (IAT) Executive Director v3 2 IAT Charter (August 2006) • Conduct independent assessment of Loran – Assemble team of experts* to review & assess continuing national need for the current US Loran infrastructure – Report findings & recommendations directly to Under Secretary of Transportation for Policy and to Deputy Under Secretary of Homeland Security for Preparedness • Assess information from recent studies & working groups’t*’ reports* – Use, for example, LORAPP & LORIPP working group reports; studies by Volpe Center, FAA, USCG, HSI, others – Supplement with information from key stakeholders and others* as approp riate *Note: IAT membership, materials reviewed, & others consulted listed on backup charts 3 Conclusions & Recommendation (Dec 2006) • Conclusions – Reasonable assurance of national PNT availability is prudent & responsible policy • For critical safety of life & economic security applications • And for all other “quality of life” applications – eLoran is cost effective backup – to protect & extend GPS – for identified critical ( other GPS-based))pp applications • Interoperable & independent • Different physical limitations & failure modes • Seamless operations & GPS threat deterrent – Given US Government support, anticipate users will equip with eLoran as the backup of choice • International community also looking for US leadership • Recommendation – Compppgpylete eLoran -

Precision Geolocation of Propagation Data Using GPS and Data Fusion
Precision Geolocation of Propagation Data Using GPS and Data Fusion Anna E. Paulson Institue for Telecommunication Sciences Boulder, CO, USA [email protected] Abstract—Geopositioning uncertainty degrades the usefulness was traveling on a single lane on a road in a particular direction, of the data collected while conducting propagation measurements the receive antenna was placed at a known, fixed height above in the field. Researchers currently have access to highly detailed the road on the drive test vehicle, etc. terrain, propagation, and locational data sets, but these data are useless if you don’t know where you are in the world; this, in turn, ITS’s precision geolocation system, described in detail in hampers the development of propagation models. This paper Section II, has evolved to include a sophisticated Global describes a commercial off-the-shelf engineering solution being Navigation Satellite System (GNSS) receiver, several real-time developed by the US Department of Commerce’s Institute for streaming position correction sources, and additional position Telecommunication Sciences that mitigates the problem of sensors. An investment in new equipment and time has borne dynamic positioning in urban corridors and reduces our fruit — to date, we have achieved a nearly 600 fold positioning uncertainty by as much as an order of magnitude in improvement in accuracy under static, “blue sky” conditions. the horizontal plane. These initial improvements were made possible by simply spending time with the equipment and identifying the optimal Keywords—GPS, GNSS, SLAM, terrain clutter, geolocation, RF settings for each use case. This practice eventually led to a set of propagation best practices [1]. -
Design of a Multiscale Base Map for a Tiled Web Map
DESIGN OF A MULTI- SCALE BASE MAP FOR A TILED WEB MAP SERVICE TARAS DUBRAVA September, 2017 SUPERVISORS: Drs. Knippers, Richard A., University of Twente, ITC Prof. Dr.-Ing. Burghardt, Dirk, TU Dresden DESIGN OF A MULTI- SCALE BASE MAP FOR A TILED WEB MAP SERVICE TARAS DUBRAVA Enschede, Netherlands, September, 2017 Thesis submitted to the Faculty of Geo-Information Science and Earth Observation of the University of Twente in partial fulfilment of the requirements for the degree of Master of Science in Geo-information Science and Earth Observation. Specialization: Cartography THESIS ASSESSMENT BOARD: Prof. Dr. Kraak, Menno-Jan, University of Twente, ITC Drs. Knippers, Richard A., University of Twente, ITC Prof. Dr.-Ing. Burghardt, Dirk, TU Dresden i Declaration of Originality I, Taras DUBRAVA, hereby declare that submitted thesis named “Design of a multi-scale base map for a tiled web map service” is a result of my original research. I also certify that I have used no other sources except the declared by citations and materials, including from the Internet, that have been clearly acknowledged as references. This M.Sc. thesis has not been previously published and was not presented to another assessment board. (Place, Date) (Signature) ii Acknowledgement It would not have been possible to write this master‘s thesis and accomplish my research work without the help of numerous people and institutions. Using this opportunity, I would like to express my gratitude to everyone who supported me throughout the master thesis completion. My colossal and immense thanks are firstly going to my thesis supervisor, Drs. Richard Knippers, for his guidance, patience, support, critics, feedback, and trust.