Low-Cost and Home-Made Immersive Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A Review About Augmented Reality Tools and Developing a Virtual Reality Application
Academic Journal of Science, CD-ROM. ISSN: 2165-6282 :: 03(02):139–146 (2014) $5(9,(:$%287$8*0(17('5($/,7<722/6$1' '(9(/23,1*$9,578$/5($/,7<$33/,&$7,21%$6('21 ('8&$7,21 0XVWDID8ODVDQG6DID0HUYH7DVFL )LUDW8QLYHULVLW\7XUNH\ Augmented Reality (AR) is a technology that gained popularity in recent years. It is defined as placement of virtual images over real view in real time. There are a lot of desktop applications which are using Augmented Reality. The rapid development of technology and easily portable mobile devices cause the increasing of the development of the applications on the mobile device. The elevation of the device technology leads to the applications and cause the generating of the new tools. There are a lot of AR Tool Kits. They differ in many ways such as used methods, Programming language, Used Operating Systems, etc. Firstly, a developer must find the most effective tool kits between them. This study is more of a guide to developers to find the best AR tool kit choice. The tool kit was examined under three main headings. The Parameters such as advantages, disadvantages, platform, and programming language were compared. In addition to the information is given about usage of them and a Virtual Reality application has developed which is based on Education. .H\ZRUGV Augmented reality, ARToolKit, Computer vision, Image processing. ,QWURGXFWLRQ Augmented reality is basically a snapshot of the real environment with virtual environment applications that are brought together. Basically it can be operated on every device which has a camera display and operation system. -

Augmented Reality & Virtual Reality Is Now a Reality for Enterprises
WHITE PAPER AUGMENTED REALITY & VIRTUAL REALITY IS NOW A REALITY FOR ENTERPRISES- THE FUTURE IS HERE! Abstract Innovation and next-generation technologies have completely changed the way we work, live and possibly even the way we think. AI, Augmented Reality (AR), Virtual Reality (VR), and Blockchain are just some of the technologies that have affected how we consume art, music, movies, and how we communicate, shop, and travel. We are in the midst of a complete digital revolution. This perspective paper illustrates a point of view on the use of mixed reality (MR) in today’s enterprise environment, and covers-- virtual reality and augmented reality, market trends, industry examples, and challenges within organizations that are adopting mixed reality. In short, it sheds light on what the future is expected to look like in the context of enterprise disruption with MR. Introduction Johnny Mnemonic, the Lawnmower Man, Minority Report, the Matrix, Minority Report, the Terminator 2, Ironman… Besides captivating audiences with their Everyone seems to know what VR headsets using special electronic equipment, such as stunning visual effects, these films all have are, and the popularity of Pokémon a helmet with an internal screen or gloves one thing in common - they showcase how Go almost allows omission of a basic fitted with sensors.” VR can digitally recreate MR technologies could be potentially used introduction to AR. Though they are often the environment around you, or give you in the future. used interchangeably, it is essential to clarify the impression you are somewhere entirely that AR and VR are not the same. -

Stereoscopic Vision, Stereoscope, Selection of Stereo Pair and Its Orientation
International Journal of Science and Research (IJSR) ISSN (Online): 2319-7064 Impact Factor (2012): 3.358 Stereoscopic Vision, Stereoscope, Selection of Stereo Pair and Its Orientation Sunita Devi Research Associate, Haryana Space Application Centre (HARSAC), Department of Science & Technology, Government of Haryana, CCS HAU Campus, Hisar – 125 004, India , Abstract: Stereoscope is to deflect normally converging lines of sight, so that each eye views a different image. For deriving maximum benefit from photographs they are normally studied stereoscopically. Instruments in use today for three dimensional studies of aerial photographs. If instead of looking at the original scene, we observe photos of that scene taken from two different viewpoints, we can under suitable conditions, obtain a three dimensional impression from the two dimensional photos. This impression may be very similar to the impression given by the original scene, but in practice this is rarely so. A pair of photograph taken from two cameras station but covering some common area constitutes and stereoscopic pair which when viewed in a certain manner gives an impression as if a three dimensional model of the common area is being seen. Keywords: Remote Sensing (RS), Aerial Photograph, Pocket or Lens Stereoscope, Mirror Stereoscope. Stereopair, Stere. pair’s orientation 1. Introduction characteristics. Two eyes must see two images, which are only slightly different in angle of view, orientation, colour, A stereoscope is a device for viewing a stereoscopic pair of brightness, shape and size. (Figure: 1) Human eyes, fixed on separate images, depicting left-eye and right-eye views of same object provide two points of observation which are the same scene, as a single three-dimensional image. -
Exploring How Bi-Directional Augmented Reality Gaze Visualisation Influences Co-Located Symmetric Collaboration
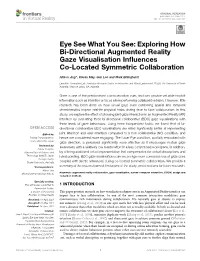
ORIGINAL RESEARCH published: 14 June 2021 doi: 10.3389/frvir.2021.697367 Eye See What You See: Exploring How Bi-Directional Augmented Reality Gaze Visualisation Influences Co-Located Symmetric Collaboration Allison Jing*, Kieran May, Gun Lee and Mark Billinghurst Empathic Computing Lab, Australian Research Centre for Interactive and Virtual Environment, STEM, The University of South Australia, Mawson Lakes, SA, Australia Gaze is one of the predominant communication cues and can provide valuable implicit information such as intention or focus when performing collaborative tasks. However, little research has been done on how virtual gaze cues combining spatial and temporal characteristics impact real-life physical tasks during face to face collaboration. In this study, we explore the effect of showing joint gaze interaction in an Augmented Reality (AR) interface by evaluating three bi-directional collaborative (BDC) gaze visualisations with three levels of gaze behaviours. Using three independent tasks, we found that all bi- directional collaborative BDC visualisations are rated significantly better at representing Edited by: joint attention and user intention compared to a non-collaborative (NC) condition, and Parinya Punpongsanon, hence are considered more engaging. The Laser Eye condition, spatially embodied with Osaka University, Japan gaze direction, is perceived significantly more effective as it encourages mutual gaze Reviewed by: awareness with a relatively low mental effort in a less constrained workspace. In addition, Naoya Isoyama, Nara Institute of Science and by offering additional virtual representation that compensates for verbal descriptions and Technology (NAIST), Japan hand pointing, BDC gaze visualisations can encourage more conscious use of gaze cues Thuong Hoang, Deakin University, Australia coupled with deictic references during co-located symmetric collaboration. -

Evaluating Performance Benefits of Head Tracking in Modern Video
Evaluating Performance Benefits of Head Tracking in Modern Video Games Arun Kulshreshth Joseph J. LaViola Jr. Department of EECS Department of EECS University of Central Florida University of Central Florida 4000 Central Florida Blvd 4000 Central Florida Blvd Orlando, FL 32816, USA Orlando, FL 32816, USA [email protected] [email protected] ABSTRACT PlayStation Move, TrackIR 5) that support 3D spatial in- teraction have been implemented and made available to con- We present a study that investigates user performance ben- sumers. Head tracking is one example of an interaction tech- efits of using head tracking in modern video games. We nique, commonly used in the virtual and augmented reality explored four di↵erent carefully chosen commercial games communities [2, 7, 9], that has potential to be a useful ap- with tasks which can potentially benefit from head tracking. proach for controlling certain gaming tasks. Recent work on For each game, quantitative and qualitative measures were head tracking and video games has shown some potential taken to determine if users performed better and learned for this type of gaming interface. For example, Sko et al. faster in the experimental group (with head tracking) than [10] proposed a taxonomy of head gestures for first person in the control group (without head tracking). A game ex- shooter (FPS) games and showed that some of their tech- pertise pre-questionnaire was used to classify participants niques (peering, zooming, iron-sighting and spinning) are into casual and expert categories to analyze a possible im- useful in games. In addition, previous studies [13, 14] have pact on performance di↵erences. -
Virtual and Augmented Reality
Virtual and Augmented Reality Virtual and Augmented Reality: An Educational Handbook By Zeynep Tacgin Virtual and Augmented Reality: An Educational Handbook By Zeynep Tacgin This book first published 2020 Cambridge Scholars Publishing Lady Stephenson Library, Newcastle upon Tyne, NE6 2PA, UK British Library Cataloguing in Publication Data A catalogue record for this book is available from the British Library Copyright © 2020 by Zeynep Tacgin All rights for this book reserved. No part of this book may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the copyright owner. ISBN (10): 1-5275-4813-9 ISBN (13): 978-1-5275-4813-8 TABLE OF CONTENTS List of Illustrations ................................................................................... x List of Tables ......................................................................................... xiv Preface ..................................................................................................... xv What is this book about? .................................................... xv What is this book not about? ............................................ xvi Who is this book for? ........................................................ xvii How is this book used? .................................................. xviii The specific contribution of this book ............................. xix Acknowledgements ........................................................... -
2020 IEEE Conference on Virtual Reality and 3D User Interfaces
2020 IEEE Conference on Virtual Reality and 3D User Interfaces (VR 2020) Atlanta , Georgia, USA 22 – 26 March 2020 IEEE Catalog Number: CFP20VIR-POD ISBN: 978-1-7281-5609-5 Copyright © 2020 by the Institute of Electrical and Electronics Engineers, Inc. All Rights Reserved Copyright and Reprint Permissions: Abstracting is permitted with credit to the source. Libraries are permitted to photocopy beyond the limit of U.S. copyright law for private use of patrons those articles in this volume that carry a code at the bottom of the first page, provided the per-copy fee indicated in the code is paid through Copyright Clearance Center, 222 Rosewood Drive, Danvers, MA 01923. For other copying, reprint or republication permission, write to IEEE Copyrights Manager, IEEE Service Center, 445 Hoes Lane, Piscataway, NJ 08854. All rights reserved. *** This is a print representation of what appears in the IEEE Digital Library. Some format issues inherent in the e-media version may also appear in this print version. IEEE Catalog Number: CFP20VIR-POD ISBN (Print-On-Demand): 978-1-7281-5609-5 ISBN (Online): 978-1-7281-5608-8 ISSN: 2642-5246 Additional Copies of This Publication Are Available From: Curran Associates, Inc 57 Morehouse Lane Red Hook, NY 12571 USA Phone: (845) 758-0400 Fax: (845) 758-2633 E-mail: [email protected] Web: www.proceedings.com 2020 IEEE Conference on Virtual Reality and 3D User Interfaces (VR) VR 2020 Table of Contents General Chairs Message xix Conference Paper Program Chairs Message xx IEEE Visualization and Graphics Technical -
Interacting with Autostereograms
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/336204498 Interacting with Autostereograms Conference Paper · October 2019 DOI: 10.1145/3338286.3340141 CITATIONS READS 0 39 5 authors, including: William Delamare Pourang Irani Kochi University of Technology University of Manitoba 14 PUBLICATIONS 55 CITATIONS 184 PUBLICATIONS 2,641 CITATIONS SEE PROFILE SEE PROFILE Xiangshi Ren Kochi University of Technology 182 PUBLICATIONS 1,280 CITATIONS SEE PROFILE Some of the authors of this publication are also working on these related projects: Color Perception in Augmented Reality HMDs View project Collaboration Meets Interactive Spaces: A Springer Book View project All content following this page was uploaded by William Delamare on 21 October 2019. The user has requested enhancement of the downloaded file. Interacting with Autostereograms William Delamare∗ Junhyeok Kim Kochi University of Technology University of Waterloo Kochi, Japan Ontario, Canada University of Manitoba University of Manitoba Winnipeg, Canada Winnipeg, Canada [email protected] [email protected] Daichi Harada Pourang Irani Xiangshi Ren Kochi University of Technology University of Manitoba Kochi University of Technology Kochi, Japan Winnipeg, Canada Kochi, Japan [email protected] [email protected] [email protected] Figure 1: Illustrative examples using autostereograms. a) Password input. b) Wearable e-mail notification. c) Private space in collaborative conditions. d) 3D video game. e) Bar gamified special menu. Black elements represent the hidden 3D scene content. ABSTRACT practice. This learning effect transfers across display devices Autostereograms are 2D images that can reveal 3D content (smartphone to desktop screen). when viewed with a specific eye convergence, without using CCS CONCEPTS extra-apparatus. -

An Empirical Study of Virtual Reality Menu Interaction and Design
Mississippi State University Scholars Junction Theses and Dissertations Theses and Dissertations 4-30-2021 An empirical study of virtual reality menu interaction and design Emily Salmon Wall [email protected] Follow this and additional works at: https://scholarsjunction.msstate.edu/td Recommended Citation Wall, Emily Salmon, "An empirical study of virtual reality menu interaction and design" (2021). Theses and Dissertations. 5161. https://scholarsjunction.msstate.edu/td/5161 This Dissertation - Open Access is brought to you for free and open access by the Theses and Dissertations at Scholars Junction. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of Scholars Junction. For more information, please contact [email protected]. Template C with Schemes v4.1 (beta): Created by L. 11/15/19 An empirical study of virtual reality menu interaction and design By TITLE PAGE Emily Salmon Wall Approved by: Reuben F. Burch V (Major Professor) Michael Hamilton Daniel Carruth Brian Smith Ginnie Hsu Linkan Bian (Graduate Coordinator) Jason M. Keith (Dean, Bagley College of Engineering) A Dissertation Submitted to the Faculty of Mississippi State University in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Industrial and Systems Engineering in the Department of Industrial and Systems Engineering Mississippi State, Mississippi April 2021 Copyright by COPYRIGHT PAGE Emily Salmon Wall 2021 Name: Emily Salmon Wall ABSTRACT Date of Degree: April 30, 2021 Institution: Mississippi State University Major Field: Industrial and Systems Engineering Major Professor: Reuben F. Burch V Title of Study: An empirical study of virtual reality menu interaction and design Pages in Study: 181 Candidate for Degree of Doctor of Philosophy This study focused on three different menu designs each with their own unique interactions and organizational structures to determine which design features would perform the best. -

CREANDO: Tool for Creating Pervasive Games to Increase the Learning Motivation in Higher Education Students
CREANDO: Tool for creating pervasive games to increase the learning motivation in higher education students Jeferson Arango-López a,b,⁎, Carlos C. Cerón Valdivieso a, Cesar A. Collazos a, b c,d Francisco Luis Gutiérrez Vela , Fernando Moreira a University of Cauca – FIET, Street 5 N° 4-70, Popayán, Colombia b University of Granada, ETSIIT, Department of Languages and Informatics Systems, Street Periodista Daniel Saucedo Aranda, s/n, 18071 Granada, Spain c Univ Portucalense, REMIT, IJP, Rua Dr. António Bernardino Almeida 541-619, 4200-072 Porto, Portugal d IEETA, Univ Aveiro, Aveiro, Portugal A R T I C L E I N F O A B S T R A C T Keywords: The pervasive games (PG) have had a great reception in recent years. This kind of games com- bines the Pervasive game virtual world with the real world to generate extensions of reality in terms of time, space and social Narrative interaction. These extensions have involved users in experiences as varied as those exposed by Learning motivation augmented reality and the location of the player or mixed reality scenarios. In the educational context, Digital transformation games have been integrated little by little into learning processes. Speci fically, PG have shown to have a higher level of immersion in people's daily activities. Therefore, a greater impact is generated when integrating the technologies of the PG and the narrative of a story that is told through the gaming experience. In order to explore some fields, we focus the study on the narrative and geolocation applied to close spaces, it is a way of giving an enriched experience to the player through a digital transformation perspective. -

Real-Time 3D Graphic Augmentation of Therapeutic Music Sessions for People on the Autism Spectrum
Real-time 3D Graphic Augmentation of Therapeutic Music Sessions for People on the Autism Spectrum John Joseph McGowan Submitted in partial fulfilment of the requirements of Edinburgh Napier University for the degree of Doctor of Philosophy October 2018 Declaration I, John McGowan, declare that the work contained within this thesis has not been submitted for any other degree or professional qualification. Furthermore, the thesis is the result of the student’s own independent work. Published material associated with the thesis is detailed within the section on Associate Publications. Signed: Date: 12th October 2019 J J McGowan Abstract i Abstract This thesis looks at the requirements analysis, design, development and evaluation of an application, CymaSense, as a means of improving the communicative behaviours of autistic participants through therapeutic music sessions, via the addition of a visual modality. Autism spectrum condition (ASC) is a lifelong neurodevelopmental disorder that can affect people in a number of ways, commonly through difficulties in communication. Interactive audio-visual feedback can be an effective way to enhance music therapy for people on the autism spectrum. A multi-sensory approach encourages musical engagement within clients, increasing levels of communication and social interaction beyond the sessions. Cymatics describes a resultant visualised geometry of vibration through a variety of mediums, typically through salt on a brass plate or via water. The research reported in this thesis focuses on how an interactive audio-visual application, based on Cymatics, might improve communication for people on the autism spectrum. A requirements analysis was conducted through interviews with four therapeutic music practitioners, aimed at identifying working practices with autistic clients. -

Téléprésence, Immersion Et Interactions Pour Le Reconstruction
THÈSE Pour obtenir le grade de DOCTEUR DE L’UNIVERSITÉ DE GRENOBLE Spécialité : Mathématiques et Informatique Arrêté ministériel : 7 août 2006 Présentée par Benjamin PETIT Thèse dirigée par Edmond BOYER et codirigée par Bruno RAFFIN préparée au sein des laboratoires LJK et LIG dans l’école doctorale MSTII Téléprésence, immersion et tel-00584001, version 1 - 7 Apr 2011 tel-00584001, version 1 - 7 interaction pour la reconstruction 3D temps-réel Thèse soutenue publiquement le 21 Février 2011 devant le jury composé de : Mme. Indira, THOUVENIN Enseignant chercheur à l’Université de Technologie de Compiègne, Président Mr. Bruno, ARNALDI Professeur à l’INSA Rennes, Rapporteur Mme. Saida, BOUAKAZ Professeur à l’Université Claude Bernard Lyon 1, Rapporteur Mr. Edmond, BOYER Directeur de recherche à l’INRIA Grenoble, Membre Mr. Bruno, RAFFIN Chargé de recherche à l’INRIA Grenoble, Membre tel-00584001, version 1 - 7 Apr 2011 Remerciements Je voudrais commencer par remercier Edmond et Bruno pour avoir encadrer ma thèse. Ce fut un plaisir de travailler avec vous. Merci également aux membres de mon jury d’avoir accepté de rapporter cette thèse. Merci pour vos commentaires très constructifs. Pendant ma thèse j’ai eu l’occasion de travailler avec différentes personnes. Ces collaborations ont été très enrichissantes. Je voudrais remercier plus spécifiquement Jean-Denis qui m’a aidé à remettre sur pied la plateforme Grimage, Thomas avec qui j’ai passé de longues heures à développer les applications et démonstrations de ma thèse et enfin Hervé pour son excellent support sur la plateforme Grimage. J’aimerais remercier également Clément et Florian pour m’avoir transmis leur savoir sur la plateforme Grimage, Nicolas et Jean-François pour leur aide technique.