Rapid EV Chargers: Implementation of a Charger
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

V2G Injector: Whispering to Cars and Charging Units Through the Power-Line
V2G Injector: Whispering to cars and charging units through the Power-Line Sébastien Dudek, Jean-Christophe Delaunay and Vincent Fargues [email protected] [email protected] [email protected] Synacktiv Abstract. Since vehicles became connected to a bus called CAN (Con- troller Area Network), many “garage” hackers got interested in investi- gating the different controllers, known as ECUs (Engine Control Units), and accessible via the On-Board Diagnostics (OBD) port. Among those different controllers, some of them are accessible via Wi-Fi, others via GPRS, 3G and 4G mobile networks, that could be attacked during a radio interception attack [19]. Moreover, another little-known vector of attack will appear with the deployment of V2G (Vehicle-to-Grid) systems that communicate via power lines support. Nevertheless, no public tool exists to interface with these systems, but also to analyse and to inject V2G traffic. That is why we have developed a tool called V2G Injector to attack these systems. In this article, we will briefly introduce the V2G concept and its similari- ties with domestic Power-Line Communication systems. Then, we will present the techniques we use in our tool that aim to interface with the system, monitor and inject traffic. We will also present a new specification vulnerability in the communication medium we have been able to exploit to intrude the V2G network. To finish, we will talk about issues we have found during our tests on real equipment, and mitigations we can encounter, or apply, in some contexts as well as possible bypasses. 1 Introduction: rise of V2G Due to its environmental friendliness, Electric Vehicle (EV) is gaining popularity in U.S.A, Japan, China and some countries in Europe. -

Product Portfolio for EV / PHEV
Chargers, cables and EV accessories 01 GC PowerBox Wall charger 01 GC PowerBox GC PowerBox Wallbox for demanding users Electric vehicles are the future. With the GC EV PowerBox you can turn your garage, home surrounding or office parking into a EV / PHEV user-friendly space. Modern, fast charging system and minimalist design - this is what you gain with Green Cell charger. 01 GC EV PowerBox GC EV PowerBox with Type 2 cable with Type 2 socket Model: EV14 Model: EV15 GC PowerBox LCD display All relevant charging data is now in your sight - current power, session time, operating temperature or even power consumption. LED indicator At first glance you can see whether the charging is still going on or maybe it has just finished. 3-phase connection Just connect five cables and the charger is ready to work. You can reach anywhere The optimal cable length makes it always comfortable to connect your vehicle to the charger. 1.5m 1.5m Better to have a choice The Type 2 socket allows you to connect any cable depending on which connector type you currently need, Type 2 or Type 1. 6m 01 GC PowerBox GC EV PowerBox Model: EV14 Type 2 Connector - European Standard The GC EV PowerBox cable ends with the most popular Type 2 plug in Europe (IEC 62196-2). This ensures extremely wide compatibility with electric vehicles and Plug-In hybrids. This plug is also compatible with CCS 2 connectors. › Ergonomic handle contouring › Fall and pressure resistance up to 2 tons › High durability of the plug for even 10,000 insertion 01 GC EV PowerBox Model: EV15 Type 2 Socket - European Standard GC PowerBox The GC EV PowerBox socket is the most popular Type 2 plug in Europe (IEC 62196-2). -
EV Connector Types
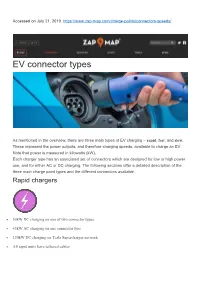
Accessed on July 21, 2019. https://www.zap-map.com/charge-points/connectors-speeds/ EV connector types As mentioned in the overview, there are three main types of EV charging – rapid, fast, and slow. These represent the power outputs, and therefore charging speeds, available to charge an EV. Note that power is measured in kilowatts (kW). Each charger type has an associated set of connectors which are designed for low or high power use, and for either AC or DC charging. The following sections offer a detailed description of the three main charge point types and the different connectors available. Rapid chargers 50kW DC charging on one of two connector types 43kW AC charging on one connector type 120kW DC charging on Tesla Supercharger network All rapid units have tethered cables Rapid chargers are the fastest way to charge an EV, often found in motorway services or in locations close to main roads. Rapid devices supply high power direct or alternating current – DC or AC – to recharge a car to 80% in 20-40 minutes. In most cases, the charging units power down when the battery is around 80% full to protect the battery and extend its life. All rapid devices have the charging cable tethered to the unit. Rapid charging can only be used on vehicles with rapid-charging capability. Given the easily recognisable connector profiles – see images below – the specification for your model is easy to check from the vehicle manual or inspecting the on-board inlet. Non-Tesla rapid DC chargers provide power at 50 kW (125A), use either the CHAdeMO or CCS charging standards, and are indicated by purple icons on Zap-Map. -

Current State-Of-The-Art of EV Chargers
Current State-of-the-Art of EV Chargers Dr. Volker Schwarzer, Dr. Reza Ghorbani Department of Mechanical Engineering for Hawaii Natural Energy Institute, University of Hawaii at Manoa 1680 East West Road, POST 109 Honolulu, HI 96822 E-mail: [email protected] Submitted to: Dr. David Block Florida Solar Energy Center University of Central Florida 1679 Clearlake Road Cocoa, FL 32922 E-mail: [email protected] Purchase Order Number: 291166 Report Number: HNEI-01-15 February, 2015 The contents of this report reflect the views of the authors, who are responsible for the facts and the accuracy of the information presented herein. This document is a project report issued and disseminated under the sponsorship of the U.S. Department of Transportation’s University Transportation Centers Program. The U.S. Government assumes no liability for the contents or use thereof. Current State-of-the-Art of EV Chargers Volker Schwarzer, Reza Ghorbani February 2015 1. Abstract Recent reports of utility providers have shown that under certain circumstances the integration of renewable energy sources might cause damaging Transient Over-Voltages (TOV) in the power grid. With the rising availability of electric vehicle (EV) charging stations in residential neighborhoods, the potential of EV batteries for TOV reduction is being examined. This report analyses the current state-of-the-art EV charger technology with respect to utilized charging technologies and their capabilities to mitigate over- voltages. Furthermore, power ratings of charging systems, including maximum power influx control and communication strategies, are analyzed. Corresponding time constraints, as well as system response times are also determined. -
2019 Annual Report.Pdf
HEV TCP Buchcover2019_EINZELN_zw.indd 1 15.04.19 11:45 International Energy Agency Technology Collaboration Programme on Hybrid and Electric Vehicles (HEV TCP) Hybrid and Electric Vehicles The Electric Drive Hauls May 2019 www.ieahev.org Implementing Agreement for Co-operation on Hybrid and Electric Vehicle Technologies and Programmes (HEV TCP) is an international membership group formed to produce and disseminate balanced, objective information about advanced electric, hybrid, and fuel cell vehicles. It enables member countries to discuss their respective needs, share key information, and learn from an ever-growing pool of experience from the development and deployment of hybrid and electric vehicles. The TCP on Hybrid and Electric Vehicles (HEV TCP) is organised under the auspices of the International Energy Agency (IEA) but is functionally and legally autonomous. Views, findings and publications of the HEV TCP do not necessarily represent the views or policies of the IEA Secretariat or its individual member countries. Cover Photo: Scania’s El Camino truck developed for trials on three e-highway demonstration sites on public roads in Germany. The truck is equipped with pantograph power collectors, developed by Siemens and constructed to use e-highway infrastructure with electric power supplied from overhead lines. (Image Courtesy: Scania) The Electric Drive Hauls Cover Designer: Anita Theel ii International Energy Agency Technology Collaboration Programme on Hybrid and Electric Vehicles (HEV TCP) Annual Report Prepared by the Executive -

Extreme Fast Charging Technology—Prospects to Enhance Sustainable Electric Transportation
energies Review Extreme Fast Charging Technology—Prospects to Enhance Sustainable Electric Transportation Deepak Ronanki *,† , Apoorva Kelkar † , Sheldon S. Williamson *,† Electric Mobility and Transportation Innovation (E-MOTION) Laboratory, Smart Transportation Electrification and Energy Research (STEER) Group, Department of Electrical, Faculty of Engineering and Applied Science, Computer and Software Engineering, University of Ontario Institute of Technology, Oshawa, ON L1G 0C5, Canada; [email protected] * Correspondence: [email protected] (D.R.); [email protected] (S.S.W.) † These authors contributed equally to this work. Received: 27 August 2019; Accepted: 25 September 2019; Published: 29 September 2019 Abstract: With the growing fleet of a new generation electric vehicles (EVs), it is essential to develop an adequate high power charging infrastructure that can mimic conventional gasoline fuel stations. Therefore, much research attention must be focused on the development of off-board DC fast chargers which can quickly replenish the charge in an EV battery. However, use of the service transformer in the existing fast charging architecture adds to the system cost, size and complicates the installation process while directly connected to medium-voltage (MV) line. With continual improvements in power electronics and magnetics, solid state transformer (SST) technology can be adopted to enhance power density and efficiency of the system. This paper aims to review the current state of the art architectures and challenges of fast charging infrastructure using SST technology while directly connected to the MV line. Finally, this paper discusses technical considerations, challenges and introduces future research possibilities. Keywords: electric vehicles; energy storage; fast charging station; power converters; solid state transformer; transportation electrification 1. -
Technical Note 5 Electric Vehicle Recharging Infrastructure for On
Technical Note 5 Electric vehicle recharging infrastructure for on-road EVs Prepared for BAA, Heathrow Airport Limited by Sustainable Transport Solutions (STS) Table of Contents 1 Introduction .............................................................. 1 1.1 Terminology .................................................................... 1 2 Charging modes ......................................................... 2 2.1 Mode 1 ............................................................................ 2 2.2 Mode 2 ............................................................................ 3 2.3 Mode 3 ............................................................................ 4 2.4 Mode 4 ............................................................................ 5 2.5 Summary ......................................................................... 5 3 Socket, plug and connector types ............................... 7 3.1 3-pin plug / BS 1363 ......................................................... 7 3.2 CEEform (Commando) / IEC 60309 ................................... 7 3.3 Type 1: Yazaki / SAE J1772 ............................................... 7 3.4 Type 2: Mennekes / VDE-AR-E 2623-2-2 ........................... 8 3.5 Type 3C: Scame / IEC 62196 ............................................. 8 3.6 JARI DC: CHAdeMO / JEVS G105 ....................................... 8 3.7 Summary ......................................................................... 9 4 EVSE and electric vehicle compatibility ..................... 11 4.1 -

Current State-Of-The-Art of EV Chargers
Current State-of-the-Art of EV Chargers Dr. Volker Schwarzer, Dr. Reza Ghorbani Department of Mechanical Engineering for Hawaii Natural Energy Institute, University of Hawaii at Manoa 1680 East West Road, POST 109 Honolulu, HI 96822 E-mail: [email protected] Submitted to: Dr. David Block Florida Solar Energy Center University of Central Florida 1679 Clearlake Road Cocoa, FL 32922 E-mail: [email protected] Purchase Order Number: 291166 Report Number: 001 February, 2015 The contents of this report reflect the views of the authors, who are responsible for the facts and the accuracy of the information presented herein. This document is disseminated under the sponsorship of the University of Central Florida and the U.S. Department of Transportation’s University Transportation Centers Program in the interest of information exchange. UCF and the U.S. Government assumes no liability for the contents or use thereof. 11 Current State-of-the-Art of EV Chargers Volker Schwarzer, Reza Ghorbani February 2015 I. Abstract Recent reports of utility providers have shown that under certain circumstances the integration of renewable energy sources might cause damaging Transient Over-Voltages (TOV) in the power grid. With the rising availability of electric vehicle (EV) charging stations in residential neighborhoods, the potential of EV batteries for TOV reduction is being examined. This report analyses the current state-of-the-art EV charger technology with respect to utilized charging technologies and their capabilities to mitigate over- voltages. Furthermore, power ratings of charging systems, including maximum power influx control and communication strategies, are analyzed. Corresponding time constraints, as well as system response times are also determined. -
Chargepoint® Home Charging Station Specifications and Ordering Information
ChargePoint® Home Charging Station Specifications and Ordering Information ChargePoint is bringing smart charging to your home with the smallest and most advanced home electric vehicle (EV) charger, offering high charging speed and convenience in an ultra-sleek, beautiful and durable design. + Charges every EV and plug-in hybrid EV with a Type 1 or Type 2 connector; tested with Mitsubishi Outlander PHEV, Nissan LEAF, BMW 330e and i83 Rex, Mercedes C350e and GLC350, Tesla Model S, X and 3, Volvo XC90 PHEV, Renault Zoe, Volkswagon e-Golf and many more + Attention to detail and quality craftsmanship make Home look great in any garage + Slim, compact form factor means Home fits even in crowded spaces + Includes hardware needed for mounting, and an online video and install guide make installation fast and easy + Backed by a 3-year warranty and 24/7 call centre support + The ChargePoint mobile app: – Allows you to schedule charging when electricity is cheapest – Sends friendly reminders so drivers never forget to plug in their cars – Can start and stop charging remotely – Shows kilometres added during charging – Displays ChargePoint public and home charging, energy use and charging costs ChargePoint Home with Type 2 Connector Ordering Information Specify model number followed by the applicable code(s). Description Order Code Model Hardwire, 32A, Type 1 6,000 mm cord CPH32-L6-T1 Hardwire, 32A, Type 2 6,000 mm cord CPH32-L6-T2 Hardwire, 32A, Type 1 8,000 mm cord CPH32-L8-T1 Hardwire, 32A, Type 2 8,000 mm cord CPH32-L8-T2 ChargePoint Home Home -
Lecture Notes: DC Charging Of
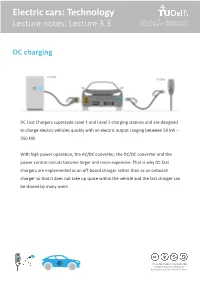
Electric cars: Technology Lecture notes: Lecture 3.3 DC charging DC Fast Chargers supersede Level 1 and Level 2 charging stations and are designed to charge electric vehicles quickly with an electric output ranging between 50 kW – 350 kW. With high power operation, the AC/DC converter, the DC/DC converter and the power control circuits become larger and more expensive. That is why DC fast chargers are implemented as an off-board charger rather than as an onboard charger so that it does not take up space within the vehicle and the fast charger can be shared by many users. This course material is licensed under a Creative Commons Attibution- 1 NonCommercial-ShareAlike 4.0 License. Electric cars: Technology Lecture notes: Lecture 3.3 DC Charger: Operation • In the first step, the alternating current or AC power provided by the AC grid is converted into direct current or DC power using a rectifier inside the DC charging station. • Then, the power control unit appropriately adjusts the voltage and current of the DC/DC converter inside the charging station to control the variable DC power delivered to charge the battery. • There are safety interlock and protection circuits used to de-energize the EV connector and to stop the charging process whenever there is a fault condition or an improper connection between the EV and the charger. • The battery management system or BMS plays the key role of communicating with the charging station to control the voltage and current delivered to the battery and to operate the protection circuits in case of an unsafe situation. -

Electric Vehicle Charging Stations Mode 1 and Mode 3
Building Control Technology Electric Vehicle Charging Stations Mode 1 and Mode 3 Course Sample 54850-1C Order no.: 54850-1C First Edition Revision level: 03/2018 By the staff of Festo Didactic © Festo Didactic Ltée/Ltd, Quebec, Canada 2018 Internet: www.festo-didactic.com e-mail: [email protected] Printed in Canada All rights reserved ISBN 978-2-89789-070-4 (Printed version) ISBN 978-2-89789-073-5 (CD-ROM) Legal Deposit – Bibliothèque et Archives nationales du Québec, 2018 Legal Deposit – Library and Archives Canada, 2018 The purchaser shall receive a single right of use which is non-exclusive, non-time-limited and limited geographically to use at the purchaser's site/location as follows. The purchaser shall be entitled to use the work to train his/her staff at the purchaser’s site/location and shall also be entitled to use parts of the copyright material as the basis for the production of his/her own training documentation for the training of his/her staff at the purchaser’s site/location with acknowledgement of source and to make copies for this purpose. In the case of schools/technical colleges, training centers, and universities, the right of use shall also include use by school and college students and trainees at the purchaser’s site/location for teaching purposes. The right of use shall in all cases exclude the right to publish the copyright material or to make this available for use on intranet, Internet, and LMS platforms and databases such as Moodle, which allow access by a wide variety of users, including those outside of the purchaser’s site/location. -
EV Technology and Market Overview (2016)
REPORT RPT0001-01406 EV Technology and Market Overview Advanced Transportation Background Report EV Technology and Market Overview October 19 2016 Status: Final Revision: 01 Josh Power, Township of Langley Greg Brooks, City of Abbotsford Eve Hou, Metro Vancouver Created by: Lewis Weston Date: 03-AUG-2016 Powertech Labs Inc. 12388 88th Avenue Approved by: Jeff Turner Date: 19-OCT-2016 Surrey, BC, V3W 7R7 Ref# Proposal 16-4652 Date: 18-DEC-2015 www.powertechlabs.com RPT0001-01406-R02 (EV Technology and Market Overview).docx Form: R01 RPT0001-01406-D01 EV Technology and Market Overview Powertech Labs Inc. Page ii RPT0001-01406-D01 EV Technology and Market Overview AUTHORIZATION Name Title Signature Role Date Project Engineer, EIT, Lewis Weston Author Oct 19th, 2016 Advanced Transportation Project Manager, EIT Jeff Turner Reviewer Oct 19th, 2016 Advanced Transportation DISCLAIMER This report was commissioned by the Township of Langley, Metro Vancouver and City of Abbotsford. Interpretation of the results of this study, as expressed in the report, is entirely the responsibility of the consultant authors and does not imply endorsement of specific points of view by the Township of Langley, Metro Vancouver or City of Abbotsford. The findings and conclusions expressed in the report are the opinion of the authors of the study and may not necessarily be supported by the Township of Langley, Metro Vancouver or City of Abbotsford. Any use by a third party of the information presented in this report, or any reliance on or decisions made based on such information, is solely the responsibility of such third party. Powertech Labs Inc.