Modulation of Orthogonal Body Waves Enables High Maneuverability in Sidewinding Locomotion
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Slithering Locomotion
SLITHERING LOCOMOTION DAVID L. HU() AND MICHAEL SHELLEY∗∗ Abstract. Limbless terrestrial animals propel themselves by sliding their bellies along the ground. Although the study of dry solid-solid friction is a classical subject, the mechanisms underlying friction-based limbless propulsion have received little attention. We review and expand upon our previous work on the locomotion of snakes, who are expert sliders. We show that snakes use two principal mechanisms to slither on flat surfaces. First, their bellies are covered with scales that catch upon ground asperities, providing frictional anisotropy. Second, they are able to lift parts of their body slightly off the ground when moving. This reduces undesired frictional drag and applies greater pressure to the parts of the belly that are pushing the snake forwards. We review a theoretical framework that may be adapted by future investigators to understand other kinds of limbless locomotion. Key words. Snakes, friction, locomotion AMS(MOS) subject classifications. Primary 76Zxx 1. Introduction. Animal locomotion is as diverse as animal form. Swimming, flying and walking have received much attention [1, 9]withthe latter being the most commonly studied means for moving on land (Fig. 1). Comparatively little attention has been paid to limbless locomotion on land, which necessarily relies upon sliding. Sliding is physically distinct from pushing against a fluid and understanding it as a form of locomotion presents new challenges, as we present in this review. Terrestrial limbless animals are rare. Those that are multicellular include worms, snails and snakes, and account for less than 2% of the 1.8 million named species (Fig. -

The Mechanics of Slithering Locomotion
The mechanics of slithering locomotion David L. Hua,b,1, Jasmine Nirodya, Terri Scotta, and Michael J. Shelleya aApplied Mathematics Laboratory, Courant Institute of Mathematical Sciences, New York University, New York, NY 10003; and bDepartments of Mechanical Engineering and Biology, Georgia Institute of Technology, Atlanta, GA 30332 Edited by Charles S. Peskin, New York University, New York, NY, and approved April 22, 2009 (received for review December 12, 2008) In this experimental and theoretical study, we investigate the the sum of frictional forces per unit length, ffric, and internal slithering of snakes on flat surfaces. Previous studies of slithering forces, fint, generated by the snakes. That is, have rested on the assumption that snakes slither by pushing laterally against rocks and branches. In this study, we develop a X¨ ϭ ffric ϩ fint , [1] theoretical model for slithering locomotion by observing snake ¨ motion kinematics and experimentally measuring the friction co- where X is the acceleration at each point along the snake’s body. efficients of snakeskin. Our predictions of body speed show good To avoid complex issues of muscle and tissue modeling, fint is agreement with observations, demonstrating that snake propul- determined to be that necessary for the model snake to produce sion on flat ground, and possibly in general, relies critically on the the observed shape kinematics. We use a sliding friction law in k frictional anisotropy of their scales. We have also highlighted the which the friction force per unit length is f ϭϪkguˆ, where importance of weight distribution in lateral undulation, previously is the sliding friction coefficient, uˆ ϭ u/u is the velocity difficult to visualize and hence assumed uniform. -

Locomotion of Reptiles" Will Be of Interest to a Wide Range of Readers
REVIEW A RTICLES Editorial note. We are trying to introduce a "new look" to the BHS Bulletin, and one of our plans is to commission articles by well-known zoologists summarising recent advances in their area of expertise, as they relate to herpetology. We are particularly pleased that Professor McNeill Alexander of Leeds University agreed to write the first of these. We hope that this masterly summary of "Locomotion of Reptiles" will be of interest to a wide range of readers. Roger Meek and Roger Avery, Co-Editors. Locomotion of Reptiles R. McNEILL ALEXANDER Institute for Integrative and Comparative Biology, University of Leeds, Leeds LS2 9JT, UK. [email protected] ABSTRACT – Reptiles run, crawl, climb, jump, glide and swim. Exceptional species run on the surface of water or “swim” through dry sand. This paper is a short summary of current knowledge of all these modes of reptilian locomotion. Most of the examples refer to lizards or snakes, but chelonians and crocodilians are discussed briefly. Extinct reptiles are omitted. References are given to scientific papers that provide more detailed information. INTRODUCTION the body and the leg joints much straighter, as in his review is an attempt to explain briefly elephants. The bigger an animal is, the harder it Tthe many different modes of locomotion that is for them to support the weight of the body in a reptiles use. Some of the information it gives lizard-like stance. Imagine two reptiles of exactly has been known for many years, but many of the the same shape, one twice as long as the other. -

Alexander 2013 Principles-Of-Animal-Locomotion.Pdf
.................................................... Principles of Animal Locomotion Principles of Animal Locomotion ..................................................... R. McNeill Alexander PRINCETON UNIVERSITY PRESS PRINCETON AND OXFORD Copyright © 2003 by Princeton University Press Published by Princeton University Press, 41 William Street, Princeton, New Jersey 08540 In the United Kingdom: Princeton University Press, 3 Market Place, Woodstock, Oxfordshire OX20 1SY All Rights Reserved Second printing, and first paperback printing, 2006 Paperback ISBN-13: 978-0-691-12634-0 Paperback ISBN-10: 0-691-12634-8 The Library of Congress has cataloged the cloth edition of this book as follows Alexander, R. McNeill. Principles of animal locomotion / R. McNeill Alexander. p. cm. Includes bibliographical references (p. ). ISBN 0-691-08678-8 (alk. paper) 1. Animal locomotion. I. Title. QP301.A2963 2002 591.47′9—dc21 2002016904 British Library Cataloging-in-Publication Data is available This book has been composed in Galliard and Bulmer Printed on acid-free paper. ∞ pup.princeton.edu Printed in the United States of America 1098765432 Contents ............................................................... PREFACE ix Chapter 1. The Best Way to Travel 1 1.1. Fitness 1 1.2. Speed 2 1.3. Acceleration and Maneuverability 2 1.4. Endurance 4 1.5. Economy of Energy 7 1.6. Stability 8 1.7. Compromises 9 1.8. Constraints 9 1.9. Optimization Theory 10 1.10. Gaits 12 Chapter 2. Muscle, the Motor 15 2.1. How Muscles Exert Force 15 2.2. Shortening and Lengthening Muscle 22 2.3. Power Output of Muscles 26 2.4. Pennation Patterns and Moment Arms 28 2.5. Power Consumption 31 2.6. Some Other Types of Muscle 34 Chapter 3. -

Bipedal Locomotion up Sandy Slopes: Systematic Experiments Using Zero Moment Point Methods
2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids) Beijing, China, November 6-9, 2018 Bipedal Locomotion Up Sandy Slopes: Systematic Experiments Using Zero Moment Point Methods Jonathan R. Gosyne1, Christian M. Hubicki2, Xiaobin Xiong3, Aaron D. Ames4 and Daniel I. Goldman5 Abstract— Bipedal robotic locomotion in granular media (a) presents a unique set of challenges at the intersection of granular physics and robotic locomotion. In this paper, we perform a systematic experimental study in which biped robotic gaits for traversing a sandy slope are empirically designed using Zero Moment Point (ZMP) methods. We are able to implement gaits that allow our 7 degree-of-freedom planar walking robot to ascend slopes with inclines up to 10◦. Firstly, we identify a given set of kinematic parameters that meet the ZMP stability (b) criterion for uphill walking at a given angle. We then find that further relating the step lengths and center of mass heights to specific slope angles through an interpolated fit allows for (c) significantly improved success rates when ascending a sandy slope. Our results provide increased insight into the design, sensitivity and robustness of gaits on granular material, and the kinematic changes necessary for stable locomotion on complex media. I. INTRODUCTION (d) Enabling humanoid machines to walk wherever humans can go is an ongoing robotics challenge. This challenge is es- pecially apparent when walking on the complex and dynamic terrain present in the natural world, such as a sand dune – a sloped surface of granular material. Every footfall will sink into the non-rigid terrain exhibiting variable dynamics with respect to time and space. -

Locomotion Wednesday May 17Th 2017 Announcements
Locomotion Wednesday May 17th 2017 Announcements • Methods draft due tomorrow (Thursday) at 9am • Email (as usual) • Subject: Field Herpetology Results • File Name: LastName_Results.docx • Materials and Methods • Field Methods: State how you will (or how you are) sampling your study species (different sites? different locations within sites? how many?), what you’re measuring (counting? SVL? environmental factors?), etc. • Data Analysis: Once you’ve collected your data, you should test it for correlation and/or significance (can I fit a line to my data? can I test for deviation from neutral expectations?) • A quick word on citations ? What kind of herp is this? ? What kind of herp is this? ? What kind of herp is this? Locomotion • Locomotion is movement that results in the organism changing place in 3-dimensional space • Amphibians and reptiles have a wide variety of locomotion modes • Limbed locomotion (walking) • Saltatorial locomotion (hopping in frogs) • Limbless locomotion (many types in snakes) • Aquatic locomotion (swimming) Limbed locomotion ! Locomotion in salamanders, many lizards, and crocodilians has not changed much since the Devonian Period Locomotion ! Limbs are stout and sprawling and work together with fish- like undulations ! Bodies are pressed to the ground when at rest, then rise up to move Limbed Locomotion • Locomotion in salamanders crocodiles, and lizards hasn’t changed much since the Devonian period (before dinosaurs evolved) Crocodilian Locomotion Salamander Locomotion • Limbs are short and sprawled out, bodies are -

Modulation of Orthogonal Body Waves Enables High Maneuverability in Sidewinding Locomotion
Modulation of orthogonal body waves enables high maneuverability in sidewinding locomotion Henry C. Astleya,1, Chaohui Gongb, Jin Daib, Matthew Traversb, Miguel M. Serranoa, Patricio A. Velaa, Howie Chosetb, Joseph R. Mendelson IIIa,c, David L. Hua, and Daniel I. Goldmana aGeorgia Institute of Technology, Atlanta, GA 30332; bCarnegie Mellon University, Pittsburgh, PA 15213; and cZoo Atlanta, Atlanta, GA 30315 Edited by Michael J. Shelley, New York University, New York, NY, and accepted by the Editorial Board February 20, 2015 (received for review October 1, 2014) Many organisms move using traveling waves of body undulation, assumed to result from the frictional anisotropy in snake scales) and most work has focused on single-plane undulations in fluids. proved insufficient to predict the lateral undulation locomotion Less attention has been paid to multiplane undulations, which are performance of these snakes. The authors proposed, modeled, particularly important in terrestrial environments where vertical and visualized a mechanism of “dynamic balancing” in which undulations can regulate substrate contact. A seemingly complex regions of the body with small curvature were preferentially mode of snake locomotion, sidewinding, can be described by the loaded; the addition of this mechanism to their model improved superposition of two waves: horizontal and vertical body waves agreement with experiment. with a phase difference of ±90°. We demonstrate that the high A peculiar gait called sidewinding provides an excellent ex- maneuverability displayed by sidewinder rattlesnakes (Crotalus ample of the importance of multiplane wave movement in cer- cerastes) emerges from the animal’s ability to independently mod- tain snakes (5, 9). During sidewinding alternating sections of the ulate these waves. -

Morphological Evolution in Relationship to Sidewinding, Arboreality and Precipitation in Snakes of the Family Viperidae
applyparastyle “fig//caption/p[1]” parastyle “FigCapt” Biological Journal of the Linnean Society, 2021, 132, 328–345. With 3 figures. Morphological evolution in relationship to sidewinding, arboreality and precipitation in snakes of the family Downloaded from https://academic.oup.com/biolinnean/article/132/2/328/6062387 by Technical Services - Serials user on 03 February 2021 Viperidae JESSICA L. TINGLE1,*, and THEODORE GARLAND JR1 1Department of Evolution, Ecology, and Organismal Biology, University of California, Riverside, Riverside, CA 92521, USA Received 30 October 2020; revised 18 November 2020; accepted for publication 21 November 2020 Compared with other squamates, snakes have received relatively little ecomorphological investigation. We examined morphometric and meristic characters of vipers, in which both sidewinding locomotion and arboreality have evolved multiple times. We used phylogenetic comparative methods that account for intraspecific variation (measurement error models) to determine how morphology varied in relationship to body size, sidewinding, arboreality and mean annual precipitation (which we chose over other climate variables through model comparison). Some traits scaled isometrically; however, head dimensions were negatively allometric. Although we expected sidewinding specialists to have different body proportions and more vertebrae than non-sidewinding species, they did not differ significantly for any trait after correction for multiple comparisons. This result suggests that the mechanisms enabling sidewinding involve musculoskeletal morphology and/or motor control, that viper morphology is inherently conducive to sidewinding (‘pre-adapted’) or that behaviour has evolved faster than morphology. With body size as a covariate, arboreal vipers had long tails, narrow bodies and lateral compression, consistent with previous findings for other arboreal snakes, plus reduced posterior body tapering. -

Lamprey Dissection
Lab Overview Concepts and definitions We will examine vertebrate morphology comparing the structure and function of systems and structural units among the major groups. This comparative method allows us to analyze the evolutionary history of structures. Evolution is the long term effect of the adaptation of a species to its environment (i.e. the change of function and structure) and is the product of natural selection. In this lab we will be able to trace the history of such adaptations and gain a better understanding of how an organism evolves. The study of morphology is useful for understanding the phylogenetic relationships among organisms. Systematics is an ordered system for the study of relationships among organisms. There are three major components to systematics. Taxonomy is the naming of organisms. Classification makes statements about the relationships among organisms. There are different classifications. Phylogenetic reconstruction tries to reflect the evolutionary history of the group. Homology refers to an intrinsic similarity indicating a common evolutionary origin (shared ancestry). Homologous characters may seem unalike superficially, but can be proved to be equivalent by the following criteria: similarity of anatomical construction, similar topographic relations to the animal body, similar physiological function, and similar courses of embryonic development. Analogy means there’s a similarity of function or appearance in structures of two species not related. It is due to convergent evolution. Primitive character in an organism means that the character is similar to that of the ancestors of the organism or that it is shared by all living groups related to one another (e. g. five digit limbs). -
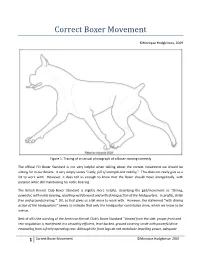
Correct Boxer Movement
Correct Boxer Movement ©Monique Hodgkinson, 2009 Figure 1: Tracing of an actual photograph of a Boxer moving correctly The official FCI Boxer Standard is not very helpful when talking about the correct movement we should be aiming for in our Boxers. It very simply states “ Lively, full of strength and nobility”. This does not really give us a lot to work with! However, it does tell us enough to know that the Boxer should move energetically, with purpose while still maintaining his noble bearing. The British Kennel Club Boxer Standard is slightly more helpful, describing the gait/movement as “Strong, powerful, with noble bearing, reaching well forward and with driving action of the hindquarters. In profile, stride free and groundcovering.” OK, so that gives us a bit more to work with. However, the statement “ with driving action of the hindquarters” seems to indicate that only the hindquarter contributes drive, which we know to be untrue. Best of all is the wording of the American Kennel Club’s Boxer Standard “Viewed from the side, proper front and rear angulation is manifested in a smoothly efficient, level-backed, ground covering stride with powerful drive emanating from a freely operating rear. Although the front legs do not contribute impelling power, adequate 1 Correct Boxer Movement ©Monique.Hodgkinson 2009 'reach' should be evident to prevent interference, overlap or 'sidewinding' (crabbing). Viewed from the front, the shoulders should remain trim and the elbows not flare out. The legs are parallel until gaiting narrows the track in proportion to increasing speed, then the legs come in under the body but should never cross. -

Terrestrial Locomotion Always Start with the Physics (As
Terrestrial Locomotion Always start with the physics (as boring as it may be) •Motion is a result of the environments reactive force (animal exerts a force on environment) Quadrapeds – Salamanders, Lizards, and Turtles (Frogs to some extent) •Most lizards and Salamanders tend to walk with limbs at sides, not high like crocodilians and most Varanids Lateral Sequence – B after D (more stable) (Northwestern Video as example) •Increased gait by lateral flexion, however, as a result this does not allow a lizard to breath while running! Can wear them out if you keep chasing them (Callisaurus beware!). Diagonal Sequence – B after C •Less stable patterns are used by animals using a faster gait •fewer points of contact with ground at any one time Ex: Pacific Giant Salamander (Dicamptodon tenebrosus) – when trotting it is supported by 2 limbs 92% of the time (a very funny sight, generally witnessed as they scurry across a road trying to avoid death!) Lizards •Many increase mobility with lateral flexion •can increase stride length not only through lateral flexion but also through a specialized joint between the pectoral girdle and sternum (found in all lepidosaurs) •Speed generally correlates with hind limb length Ex: Zebra‐tailed Lizard (Callisaurus draconoides) – very long hind limbs •Morphological adaptations such as fringes allow lizards to move quickly and efficiently on surfaces that give way to the forces exerted by the lizard) •Basilisks have specialized fringes that allow the lizard to trap air under its feet as it moves across the water’s surface, the air becomes the resistance that pushes back •Fringe‐toed Lizards (Uma sp.) have fringes that create more surface area act as snow shoes on the sand. -

Morphological Intelligence Counters Foot Slipping in the Desert Locust And
Morphological intelligence counters foot slipping in the desert locust and dynamic robots Matthew A. Woodwarda and Metin Sittia,1 aPhysical Intelligence Department, Max Planck Institute for Intelligent Systems, 70569 Stuttgart, Germany Edited by John A. Rogers, Northwestern University, Evanston, IL, and approved July 20, 2018 (received for review March 10, 2018) During dynamic terrestrial locomotion, animals use complex mul- including hydrophobic glass (contact angles of 94.7◦/84.0◦, n = tifunctional feet to extract friction from the environment. How- 119), hydrophilic glass (contact angles of 32.6◦/21.6◦, n = 111), ever, whether roboticists assume sufficient surface friction for wood (sawn pine, n = 113), sandstone (n = 112), and mesh (steel, locomotion or actively compensate for slipping, they use rel- n = 95), where n represents the number of trials (Fig. 2, Table 1, atively simple point-contact feet. We seek to understand and and Surface Preparation). These materials were selected to both extract the morphological adaptations of animal feet that con- challenge and isolate the two major attachment mechanisms of tribute to enhancing friction on diverse surfaces, such as the the locust: the spines, whose contribution to surface friction is desert locust (Schistocerca gregaria) [Bennet-Clark HC (1975) J Exp unknown, and wet adhesive pads (Fig. 1B). We proposed that Biol 63:53–83], which has both wet adhesive pads and spines. A the glass would sufficiently isolate the adhesive pad behavior buckling region in their knee to accommodate slipping [Bayley TG, and the change in wettability would challenge the wet adhesion, Sutton GP,Burrows M (2012) J Exp Biol 215:1151–1161], slow nerve whereas the wood, sandstone, and mesh would sufficiently iso- conduction velocity (0.5–3 m/s) [Pearson KG, Stein RB, Malhotra late the spine behavior, and the change in surface roughness and SK (1970) J Exp Biol 53:299–316], and an ecological pressure to cohesion would challenge the spine friction (42).