ISSC2021-Booklet.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Orbital Debris Quarterly News 22-1
National Aeronautics and Space Administration Orbital Debris Quarterly News Volume 22, Issue 1 February 2018 Inside... Two Anomalous Events in GEO Summer 2017 was marred by two apparently platform. Spacecraft dry mass is estimated to be on Space Debris Sensor anomalous events in the geosynchronous orbit the order of 2000 kg. On-board stored energy sources Launches Aboard (GEO) belt. Both incidents have been observed by include fuel and pressurized components, as well as the commercial space situation awareness providers, but as battery subsystem. SpaceX-13 2 of 26 December 2017 no debris from either event have The Indonesian GEO communications spacecraft entered the public catalog. TELKOM-1 (1999-042A, SSN catalog number 25880) SEM Analysis The GEO communications spacecraft AMC-9 experienced an energetic event on or about 25 August Results of (International Designator 2003-024A, U.S. Strategic 2017, after over 18.1 years on-orbit—3 years past Returned ISS Command [USSTRATCOM] Space Surveillance its nominal operational lifetime. An examination of Network [SSN] catalog number 27820), formerly known the Two Line Element data indicates an observable PMA-2 Cover 4 as GE-12, experienced an energetic event estimated to change in spacecraft orbit between 26 and 29 August. have occurred at approximately 07:10 GMT on 17 June At the beginning of this time interval, approximately CubeSat Study 2017, after approximately 14 years on-orbit. Fig. 1 Project Review 6 depicts the orbital evolution of the spacecraft in 2017. continued on page 2 SES, the spacecraft owner- operator, described this AMC‐9 (SSN 27820, 2003‐024A) 360 36300 Space Debris Sensor event as a “serious anomaly.” Installation 8 Following this event, the 36200 spacecraft began a westward 300 Monthly Object Type drift in the GEO belt. -

Identify GEO Objects #5
Identification of UI Objects in Classification of Geosynchronous Objects Issue 11 Ted Molczan 2010 Jan 31 Revision 2, 2010 Feb 02 Abstract Sixty-seven (67) objects reported as unidentified in Classification of Geosynchronous Objects, Issue 11, have been newly correlated with launches, and identified as a specific piece from their launch. Corrections of 5 previous independent identifications are proposed. This increases the total number of identified objects to 140, out of 152 originally reported as unidentified. 1. Introduction The European Space Agency’s European Space Operations Centre reports annually on the status of objects in geosynchronous orbit, via the Classification of Geosynchronous Objects (COGO) series, produced by the Space Debris Office of the Ground Systems Engineering Department. COGO Issue 11, Section 4.7, reports 152 objects tracked by the International Scientific Optical Network (ISON), classified as unidentified, because they could not initially be correlated with a specific launch. They receive permanent IDs of the form UI.nnn, in which UI denotes unidentified, and nnn is a serial number. Objects that are eventually correlated to launches retain their UI designation, but are also listed in Section 4.7 with their COSPAR designation. The launches expected to account for most of the 152 UI objects are the 77 which placed a total of 153 officially catalogued objects into geosynchronous orbit, for which orbital elements are not available from official sources. COGO Issue 11, identifies 40 objects that had been correlated with their launches, and independent researchers have correlated an additional 33 objects. All belong to the 77 known launches. The present study originates within the small community of hobbyists who observe objects in orbits for which official orbital elements are not available, and analyze their orbits, optical characteristics and radio transmissions. -

New Moon Explorer Mission Concept
New Moon Explorer Mission Concept Les JOHNSONa,*, John CARRa,Jared Jared DERVANa, Alexander FEWa, Andy HEATONa, Benjamin Malphrusd, Leslie MCNUTTa, Joe NUTHb, Dana Tursec, and Aaron Zuchermand aNASA MSFC, Huntsville, AL USA bNASA GSFC, Huntsville, AL USA cRoccor, Longmont, CO USA dMorehead State University, Morehead, KY USA Abstract New Moon Explorer (NME) is a smallsat reconnaissance mission concept to explore Earth’s ‘New Moon’, the recently discovered Earth orbital companion asteroid 469219 Kamoʻoalewa (formerly 2016HO3), using solar sail propulsion. NME would determine Kamoʻoalewa’s spin rate, pole position, shape, structure, mass, density, chemical composition, temperature, thermal inertia, regolith characteristics, and spectral type using onboard instrumentation. If flown, NME would demonstrate multiple enabling technologies, including solar sail propulsion, large-area thin film power generation, and small spacecraft technology tailored for interplanetary space missions. Leveraging the solar sail technology and mission expertise developed by NASA for the Near Earth Asteroid (NEA) Scout mission, affordably learning more about our newest near neighbor is now a possibility. The mission is not yet planned for flight. Keywords: Kamoʻoalewa, solar sail, moon, Apollo asteroid 1. Introduction The emerging capabilities of extremely small spacecraft, coupled with solar sail propulsion, offers an opportunity for low-cost reconnaissance of the recently- discovered asteroid 469219 Kamoʻoalewa (formerly 2016HO3). While Kamoʻoalewa is not strictly a new moon, it is, for all practical purposes, an orbital companion of the Earth as the planet circles the sun. Kamoʻoalewa’s orbit relative to the Earth can be seen in Figure 1. Using the technologies developed for the NASA Fig. 1 The orbit of Earth’s companion, Kamoʻoalewa Near Earth Asteroid (NEA) Scout mission, a 6U as both it and the Earth orbit the Sun. -

The Cubesat Mission to Study Solar Particles (Cusp) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021)
The CubeSat Mission to Study Solar Particles (CuSP) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021) Acknowledgements – National Aeronautics and Space Administration (NASA) and CuSP Principal Investigator, Dr. Mihir Desai, Southwest Research Institute (SwRI) Feature Articles in SYSTEMS Magazine Three-part special series on Artemis I CubeSats - April 2019 (CuSP, IceCube, ArgoMoon, EQUULEUS/OMOTENASHI, & DSN) ▸ - September 2019 (CisLunar Explorers, OMOTENASHI & Iris Transponder) - March 2020 (BioSentinnel, Near-Earth Asteroid Scout, EQUULEUS, Lunar Flashlight, Lunar Polar Hydrogen Mapper, & Δ-Differential One-Way Range) Available in the AESS Resource Center https://resourcecenter.aess.ieee.org/ ▸Free for AESS members ▸ What are CubeSats? A class of small research spacecraft Built to standard dimensions (Units or “U”) ▸ - 1U = 10 cm x 10 cm x 11 cm (Roughly “cube-shaped”) ▸ - Modular: 1U, 2U, 3U, 6U or 12U in size - Weigh less than 1.33 kg per U NASA's CubeSats are dispensed from a deployer such as a Poly-Picosatellite Orbital Deployer (P-POD) ▸NASA’s CubeSat Launch initiative (CSLI) provides opportunities for small satellite payloads to fly on rockets ▸planned for upcoming launches. These CubeSats are flown as secondary payloads on previously planned missions. https://www.nasa.gov/directorates/heo/home/CubeSats_initiative What is CuSP? NASA Science Mission Directorate sponsored Heliospheric Science Mission selected in June 2015 to be launched on Artemis I. ▸ https://www.nasa.gov/feature/goddard/2016/heliophys ics-cubesat-to-launch-on-nasa-s-sls Support space weather research by determining proton radiation levels during solar energetic particle events and identifying suprathermal properties that could help ▸ predict geomagnetic storms. -

Lunar Flashlight & NEA Scout
National Aeronautics and Space Administration Lunar Flashlight & NEA Scout A NanoSat Architecture for Deep Space Exploration Payam Banazadeh (JPL/Caltech) Andreas Frick (JPL/Caltech) EM-1 Secondary Payload Selection • 19 NASA center-led concepts were evaluated and 3 were down-selected for further refinement by AES toward a Mission Concept Review (MCR) planned for August 2014 • Primary selection criteria: - Relevance to Space Exploration Strategic Knowledge Gaps (SKGs) - Life cycle cost - Synergistic use of previously demonstrated technologies - Optimal use of available civil servant workforce Payload Strategic Knowledge Gaps Mission Concept NASA Centers Addressed BioSentinel Human health/performance in high- Study radiation-induced DNA ARC/JSC radiation space environments damage of live organisms in cis- • Fundamental effects on biological systems lunar space; correlate with of ionizing radiation in space environments measurements on ISS and Earth Lunar Flashlight Lunar resource potential Locate ice deposits in the Moon’s JPL/MSFC/MHS • Quantity and distribution of water and other permanently shadowed craters volatiles in lunar cold traps Near Earth Asteroid (NEA) NEA Characterization Slow flyby/rendezvous and Scout • NEA size, rotation state (rate/pole position) characterize one NEA in a way MSFC/JPL How to work on and interact with NEA that is relevant to human surface exploration • NEA surface mechanical properties 2 EM-1: Near Earth Asteroid (NEA) Scout concept WHY NEA Scout? – Characterize a NEA with an imager to address key Strategic -

Spring 2018 Undergraduate Law Journal
SPRING 2018 UNDERGRADUATE LAW JOURNAL The Final Frontier: Evolution of Space Law in a Global Society By: Garett Faulkender and Stephan Schneider Introduction “Space: the final frontier!” These are the famous introductory words spoken by William Shatner on every episode of Star Trek. This science-fiction TV show has gained a cult-following with its premise as a futuristic Space odyssey. Originally released in 1966, many saw the portrayed future filled with Space-travel, inter-planetary commerce and politics, and futuristic technology as merely a dream. However, today we are starting to explore this frontier. “We are entering an exciting era in [S]pace where we expect more advances in the next few decades than throughout human history.”1 Bank of America/Merrill Lynch has predicted that the Space industry will grow to over $2.7 trillion over the next three decades. Its report said, “a new raft of drivers is pushing the ‘Space Age 2.0’”.2 Indeed, this market has seen start-up investments in the range of $16 billion,3 helping fund impressive new companies like Virgin Galactic and SpaceX. There is certainly a market as Virgin Galactic says more than 600 customers have registered for a $250,000 suborbital trip, including Leonardo DiCaprio, Katy Perry, Ashton Kutcher, and physicist Stephen Hawking.4 Although Space-tourism is the exciting face of a future in Space, the Space industry has far more to offer. According to the Satellite Industries 1 Michael Sheetz, The Space Industry Will Be Worth Nearly $3 Trillion in 30 Years, Bank of America Predicts, CNBC, (last updated Oct. -
Solar Sail Propulsion for Deep Space Exploration
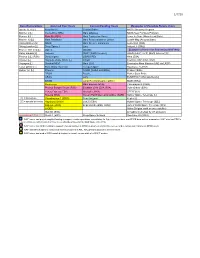
Solar Sail Propulsion for Deep Space Exploration Les Johnson NASA George C. Marshall Space Flight Center NASA Image We tend to think of space as being big and empty… NASA Image Space Is NOT Empty. We can use the environments of space to our advantage NASA Image Solar Sails Derive Propulsion By Reflecting Photons Solar sails use photon “pressure” or force on thin, lightweight, reflective sheets to produce thrust. 4 NASA Image Real Solar Sails Are Not “Ideal” Billowed Quadrant Diffuse Reflection 4 Thrust Vector Components 4 Solar Sail Trajectory Control Solar Radiation Pressure allows inward or outward Spiral Original orbit Sail Force Force Sail Shrinking orbit Expanding orbit Solar Sails Experience VERY Small Forces NASA Image 8 Solar Sail Missions Flown Image courtesy of Univ. Surrey NASA Image Image courtesy of JAXA Image courtesy of The Planetary Society NanoSail-D (2010) IKAROS (2010) LightSail-1 & 2 CanX-7 (2016) InflateSail (2017) NASA JAXA (2015/2019) Canada EU/Univ. of Surrey The Planetary Society Earth Orbit Interplanetary Earth Orbit Earth Orbit Deployment Only Full Flight Earth Orbit Deployment Only Deployment Only Deployment / Flight 3U CubeSat 315 kg Smallsat 3U CubeSat 3U CubeSat 10 m2 196 m2 3U CubeSat <10 m2 10 m2 32 m2 9 Planned Solar Sail Missions NASA Image NASA Image NASA Image Near Earth Asteroid Scout Advanced Composite Solar Solar Cruiser (2025) NASA (2021) NASA Sail System (TBD) NASA Interplanetary Interplanetary Earth Orbit Full Flight Full Flight Full Flight 100 kg spacecraft 6U CubeSat 12U CubeSat 1653 m2 86 -

Flight Opportunities and Small Spacecraft Technology Program Updates NAC Technology, Innovation and Engineering Committee Meeting | March 19, 2020
Flight Opportunities and Small Spacecraft Technology Program Updates NAC Technology, Innovation and Engineering Committee Meeting | March 19, 2020 Christopher Baker NASA Space Technology Mission Directorate Flight Opportunities and Small Spacecraft Technology Program Executive National Aeronautics and Space Administration 1 CHANGING THE PACE OF SPACE Through Small Spacecraft Technology and Flight Opportunities, Space Tech is pursuing the rapid identification, development, and testing of capabilities that exploit agile spacecraft platforms and responsive launch capabilities to increase the pace of space exploration, discovery, and the expansion of space commerce. National Aeronautics and Space Administration 2 THROUGH SUBORBITAL FLIGHT The Flight Opportunities program facilitates rapid demonstration of promising technologies for space exploration, discovery, and the expansion of space commerce through suborbital testing with industry flight providers LEARN MORE: WWW.NASA.GOV/TECHNOLOGY Photo Credit: Blue Origin National Aeronautics and Space Administration 3 FLIGHT OPPORTUNITIES BY THE NUMBERS Between 2011 and today… In 2019 alone… Supported 195 successful fights Supported 15 successful fights Enabled 676 tests of payloads Enabled 47 tests of payloads 254 technologies in the portfolio 86 technologies in the portfolio 13 active commercial providers 9 active commercial providers National Aeronautics and Space Administration Numbers current as of March 1, 2020 4 TECHNOLOGY TESTED IN SUBORBITAL Lunar Payloads ISS SPACE IS GOING TO EARTH ORBIT, THE MOON, MARS, AND BEYOND Mars 2020 Commercial Critical Space Lunar Payload Exploration Services Solutions National Aeronautics and Space Administration 5 SUBORBITAL INFUSION HIGHLIGHT Commercial Lunar Payload Services Four companies selected as Commercial Lunar Payload Services (CPLS) providers leveraged Flight Opportunities-supported suborbital flights to test technologies that are incorporated into their landers and/or are testing lunar landing technologies under Flight Opportunities for others. -

Richard Hunter1, Mike Loucks2, Jonathan Currie1, Doug Sinclair3, Ehson Mosleh1, Peter Beck1
Co-Authors: Richard Hunter1, Mike Loucks2, Jonathan Currie1, Doug Sinclair3, Ehson Mosleh1, Peter Beck1 1 Rocket Lab USA, Inc. 2Space Exploration Engineering 3Sinclair by Rocket Lab (formerly Sinclair Interplanetary) Photon-enabled Planetary Small Spacecraft Missions For Decadal Science A White Paper for the 2023-2032 Planetary Decadal Survey 1. OVERVIEW Regular, low-cost Decadal-class science missions to planetary destinations enabled by small high-ΔV spacecraft, like the high-energy Photon, support expanding opportunities for scientists and increase the rate of science return. The high-energy Photon can launch on Electron to precisely target escape asymptotes for planetary small spacecraft missions with payload masses up to ~50 kg without the need for a medium or heavy lift launch vehicle. The high-energy Photon can also launch as a secondary payload with even greater payload masses to deep-space science targets. This paper describes planetary mission concepts connected to science objectives that leverage Rocket Lab’s deep space mission approach. The high-energy Photon can access various planetary science targets of interest including the cislunar environment, Small Bodies, Mars, Venus, and the Outer Planets. Additional planetary small spacecraft missions with focused investigations are recommended, including dedicated small spacecraft missions that do not rely on launch as a secondary payload. 2. HIGH-ENERGY PHOTON Figure 1: The high-energy The high-energy Photon (Figure 1) is a self-sufficient small spacecraft Photon enables small planetary capable of long-duration interplanetary cruise. Its power system is science missions, including Venus probe missions. conventional, using photovoltaic solar arrays and lithium-polymer secondary batteries. The attitude control system includes star trackers, sun sensors, an inertial measurement unit, three reaction wheels, and a cold-gas reaction control system (RCS). -

Launch Availability Analysis for the Artemis Program
Launch Availability Analysis for the Artemis Program Grant Cates and Doug Coley Kandyce Goodliff and William Cirillo The Aerospace Corporation NASA Langley Research Center 4851 Stonecroft Boulevard 1 North Dryden Blvd., MS462 Chantilly, VA 20151 Hampton, VA 23681 571-304-3915 / 571-304-3057 757-864-1938 [email protected] [email protected] [email protected] [email protected] Chel Stromgren Binera, Inc. 77 S. Washington St., Suite 206 Rockville, MD 20910 301-686-8571 [email protected] Abstract—On March 26, 2019, Vice President Pence stated that will be on achieving all of the launches in a timely fashion. the policy of the Trump administration and the United States of NASA and the commercial partners need quantitative America is to return American astronauts to the Moon within estimates for launch delay risks as they develop the lunar the next five years i.e., by 2024. Since that time, NASA has begun lander design and refine the concept of operations. Of the process of developing concepts of operations and launch particular importance will be understanding how long each campaign options to achieve that goal as well as to provide a sustainable human presence on the Moon. Whereas the Apollo lunar lander element will be in space and how long the program utilized one Saturn V rocket to carry out a single lunar integrated lander will have to wait in lunar orbit prior to the landing mission of short duration, NASA’s preliminary plans arrival of Orion and the crew. for the Artemis Program call for a combination of medium lift class rockets along with the heavy lift Space Launch System 2. -

Managing Supply Chain Risks in an International Organisation - European Space Agency
Managing Supply Chain Risks in an International Organisation - European Space Agency Britta Schade 23/10/2018 ESA UNCLASSIFIED - For Official Use ESA Facts and Figures . Over 50 years of experience . 22 Member States . Eight sites/facilities in Europe, about 2300 staff . 5.75 billion Euro budget (2017) . Over 80 satellites designed, tested and operated in flight ESA UNCLASSIFIED - For Official Use Britta Schade | ESA-TECQ-HO-011192 | ESTEC | 23/10/2018 | Slide 2 Purpose of ESA “To provide for and promote, for exclusively peaceful purposes, cooperation among European states in space research and technology and their space applications.” Article 2 of ESA Convention ESA UNCLASSIFIED - For Official Use Britta Schade | ESA-TECQ-HO-011192 | ESTEC | 23/10/2018 | Slide 3 Member States ESA has 22 Member States: 20 states of the European Union (Austria, Belgium, Czech Republic, Denmark, Estonia, Finland, France, Germany, Greece, Hungary, Ireland, Italy, Luxembourg, Netherlands, Poland, Portugal, Romania, Sweden, United Kingdeom) plus Norway and Switzerland. Six other European Union (EU) states have Cooperation Agreements with ESA: Bulgaria, Cyprus, Latvia, Lithuania, Malta and Slovakia. Discussions are ongoing with Croatia. Slovenia is an Associate Member. Canada takes part in some programmes under a long-standing Cooperation Agreement. ESA UNCLASSIFIED - For Official Use Britta Schade | ESA-TECQ-HO-011192 | ESTEC | 23/10/2018 | Slide 4 ESA Locations Salmijaervi (Kiruna) Moscow Brussels ESTEC (Noordwijk) ECSAT (Harwell) EAC (Cologne) Washington Maspalomas Houston ESA HQ (Paris) ESOC (Darmstadt) Santa Maria Oberpfaffenhofen Kourou Toulouse New Norcia ESEC (Redu) Malargüe ESAC (Madrid) ESRIN (Rome) ESA sites Cebreros Offices ESA Ground Station + Offices ESA Ground Station ESA sites + ESA Ground Station ESA UNCLASSIFIED - For Official Use Britta Schade | ESA-TECQ-HO-011192 | ESTEC | 23/10/2018 | Slide 5 Activities space science human spaceflight exploration ESA is one of the few space agencies in the world to combine responsibility in nearly all areas of space activity. -
List of Missions Using SPICE (PDF)
1/7/20 Data Restorations Selected Past Users Current/Pending Users Examples of Possible Future Users Apollo 15, 16 [L] Magellan [L] Cassini Orbiter NASA Discovery Program Mariner 2 [L] Clementine (NRL) Mars Odyssey NASA New Frontiers Program Mariner 9 [L] Mars 96 (RSA) Mars Exploration Rover Lunar IceCube (Moorehead State) Mariner 10 [L] Mars Pathfinder Mars Reconnaissance Orbiter LunaH-Map (Arizona State) Viking Orbiters [L] NEAR Mars Science Laboratory Luna-Glob (RSA) Viking Landers [L] Deep Space 1 Juno Aditya-L1 (ISRO) Pioneer 10/11/12 [L] Galileo MAVEN Examples of Users not Requesting NAIF Help Haley armada [L] Genesis SMAP (Earth Science) GOLD (LASP, UCF) (Earth Science) [L] Phobos 2 [L] (RSA) Deep Impact OSIRIS REx Hera (ESA) Ulysses [L] Huygens Probe (ESA) [L] InSight ExoMars RSP (ESA, RSA) Voyagers [L] Stardust/NExT Mars 2020 Emmirates Mars Mission (UAE via LASP) Lunar Orbiter [L] Mars Global Surveyor Europa Clipper Hayabusa-2 (JAXA) Helios 1,2 [L] Phoenix NISAR (NASA and ISRO) Proba-3 (ESA) EPOXI Psyche Parker Solar Probe GRAIL Lucy EUMETSAT GEO satellites [L] DAWN Lunar Reconnaissance Orbiter MOM (ISRO) Messenger Mars Express (ESA) Chandrayan-2 (ISRO) Phobos Sample Return (RSA) ExoMars 2016 (ESA, RSA) Solar Orbiter (ESA) Venus Express (ESA) Akatsuki (JAXA) STEREO [L] Rosetta (ESA) Korean Pathfinder Lunar Orbiter (KARI) Spitzer Space Telescope [L] [L] = limited use Chandrayaan-1 (ISRO) New Horizons Kepler [L] [S] = special services Hayabusa (JAXA) JUICE (ESA) Hubble Space Telescope [S][L] Kaguya (JAXA) Bepicolombo (ESA, JAXA) James Webb Space Telescope [S][L] LADEE Altius (Belgian earth science satellite) ISO [S] (ESA) Armadillo (CubeSat, by UT at Austin) Last updated: 1/7/20 Smart-1 (ESA) Deep Space Network Spectrum-RG (RSA) NAIF has or had project-supplied funding to support mission operations, consultation for flight team members, and SPICE data archive preparation.