Trajectory Estimation of the Hayabusa Sample Return Capsule Using Optical Sensors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rosetta Craft Makes Historic Comet Rendezvous European Space Agency's Comet-Chasing Mission Arrives After 10-Year Journey
NATURE | NEWS Rosetta craft makes historic comet rendezvous European Space Agency's comet-chasing mission arrives after 10-year journey. Elizabeth Gibney 06 August 2014 ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Comet 67P/Churyumov–Gerasimenko, as seen by Rosetta from a distance of 285 kilometres. No one can deny that it was an epic trip. The European Space Agency's comet-chasing Rosetta spacecraft has arrived at its quarry, after launching more than a decade ago and travelling 6.4 billion kilometres through the Solar System. That makes it the first spacecraft to rendezvous with a comet, and takes the mission a step closer to its next, more ambitious goal of making the first ever soft landing on a comet. Speaking from mission control in Darmstadt, Germany, Matt Taylor, Rosetta project scientist for the European Space Agency (ESA), called the space mission “the sexiest there’s ever been”. Rosetta is now within 100 kilometres of its target, comet 67P/Churyumov–Gerasimenko (or 67P for short), which in July was discovered to be shaped like a rubber duck. After a six-minute thruster burn, at 11:29 a.m. local time on 6 August, ESA scientists confirmed that Rosetta had moved into the same orbit around the Sun as the comet. Rosetta is now moving at a walking pace relative to the motion of 67P — though both are hurtling through space at 15 kilometres per second. Unlike NASA’s Deep Impact and Stardust craft, and ESA’s Giotto mission, which flew by their target comets at high speed, Rosetta will now stay with the comet, taking a ring-side seat as 67P approaches the Sun, and eventually swings around it in August 2015. -

OSIRIS-Rex, Returning the Asteroid Sample
OSIRIS-REx, Returning the Asteroid Sample Thomas Ajluni Timothy Linn William Willcockson ASRC Federal Space & Defense Lockheed Martin Space Systems Lockheed Martin Space Systems 7000 Muirkirk Meadows Drive Company, P.O. Box 179 Company, P.O. Box 179 Suite 100, Beltsville, MD 20705 Denver, CO 80201 Denver, CO 80201 301.286.1831 303-977-0659 303-977-5094 [email protected] [email protected] [email protected] David Everett Ronald Mink Joshua Wood NASA Goddard Space Flight NASA Goddard Space Flight Lockheed Martin Space Systems Center, 8800 Greenbelt Road Center, 8800 Greenbelt Road Company, P.O. Box 179 Greenbelt, MD 20771 Greenbelt, MD 20771 Denver, CO 80201 301.286.1596 301.286.3524 303-977-3199 [email protected] [email protected] [email protected] Abstract—This paper addresses the technical aspects of the sample return system for the upcoming Origins, Spectral x attitude control Interpretation, Resource Identification, and Security-Regolith x propulsion Explorer (OSIRIS-REx) asteroid sample return mission. The x power overall mission design and current implementation are presented as an overview to establish a context for the x thermal control technical description of the reentry and landing segment of the x telecommunications mission. x command and data handling x structural support to ensure successful rendezvous The prime objective of the OSIRIS-REx mission is to sample a with Bennu primitive, carbonaceous asteroid and to return that sample to Earth in pristine condition for detailed laboratory analysis. x characterization of Bennu’s properties Targeting the near-Earth asteroid Bennu, the mission launches x delivery of the sampler to the surface, and return of in September 2016 with an Earth reentry date of September the spacecraft to the vicinity of the Earth 24, 2023. -

Chondrule-Like Material in Wild 2: a New Insight from Impact Experiments of Chondrule Fragments on Stardust Analogue Al Foil
52nd Lunar and Planetary Science Conference 2021 (LPI Contrib. No. 2548) 1925.pdf CHONDRULE-LIKE MATERIAL IN WILD 2: A NEW INSIGHT FROM IMPACT EXPERIMENTS OF CHONDRULE FRAGMENTS ON STARDUST ANALOGUE AL FOIL. M. Van Ginneken1 and P. J. Wozniakiewicz1, 1Centre for Astrophysics and Planetary Science, School of Physical Sciences, University of Kent, United Kingdom ([email protected]; [email protected]) Introduction: NASA’s Stardust mission was the shape of craters depends mainly on the physical first mission to bring back to Earth material from a properties of the impactor [19]. Solid grains or dense celestial body, i.e. the Jupiter Family Comet (JFC) consolidated aggregates similar to chondrule fragments 81P/Wild 2 (hereafter Wild 2) [1]. Cometary dust was will result in bowl-shaped craters, the depth of which captured via impact into a collector that was deployed depending on the density of the material, whereas loose during a fly-by through the coma of Wild 2 at a relative aggregates of submicron particles result in complex speed of 6 km s-1. The collector consisted of silica features. Simulation of Stardust impacts using silicate aerogel secured into a metal frame by aluminum 1100 grains have shown that about 50% of silicate dominated foil (hereafter Al foil). A major result of the mission was impactors are retained as residue, which can be analysed the discovery that, contrary to expectations, Wild 2 was and provide precious chemical information [20]. not predominantly composed of presolar grains and low Studies of residues in a small (ø < 10 µm) or large temperature outer solar nebula material, but rather high (ø > 10 µm) craters on Stardust foil have shown that temperature (>>1000 °C) material typical of primitive these can give information on the bulk chemistry of the meteorites [1 - 3]. -

Space Sector Brochure
SPACE SPACE REVOLUTIONIZING THE WAY TO SPACE SPACECRAFT TECHNOLOGIES PROPULSION Moog provides components and subsystems for cold gas, chemical, and electric Moog is a proven leader in components, subsystems, and systems propulsion and designs, develops, and manufactures complete chemical propulsion for spacecraft of all sizes, from smallsats to GEO spacecraft. systems, including tanks, to accelerate the spacecraft for orbit-insertion, station Moog has been successfully providing spacecraft controls, in- keeping, or attitude control. Moog makes thrusters from <1N to 500N to support the space propulsion, and major subsystems for science, military, propulsion requirements for small to large spacecraft. and commercial operations for more than 60 years. AVIONICS Moog is a proven provider of high performance and reliable space-rated avionics hardware and software for command and data handling, power distribution, payload processing, memory, GPS receivers, motor controllers, and onboard computing. POWER SYSTEMS Moog leverages its proven spacecraft avionics and high-power control systems to supply hardware for telemetry, as well as solar array and battery power management and switching. Applications include bus line power to valves, motors, torque rods, and other end effectors. Moog has developed products for Power Management and Distribution (PMAD) Systems, such as high power DC converters, switching, and power stabilization. MECHANISMS Moog has produced spacecraft motion control products for more than 50 years, dating back to the historic Apollo and Pioneer programs. Today, we offer rotary, linear, and specialized mechanisms for spacecraft motion control needs. Moog is a world-class manufacturer of solar array drives, propulsion positioning gimbals, electric propulsion gimbals, antenna positioner mechanisms, docking and release mechanisms, and specialty payload positioners. -
Stardust Sample Return
National Aeronautics and Space Administration Stardust Sample Return Press Kit January 2006 www.nasa.gov Contacts Merrilee Fellows Policy/Program Management (818) 393-0754 NASA Headquarters, Washington DC Agle Stardust Mission (818) 393-9011 Jet Propulsion Laboratory, Pasadena, Calif. Vince Stricherz Science Investigation (206) 543-2580 University of Washington, Seattle, Wash. Contents General Release ............................................................................................................... 3 Media Services Information ……………………….................…………….................……. 5 Quick Facts …………………………………………..................………....…........…....….. 6 Mission Overview …………………………………….................……….....……............…… 7 Recovery Timeline ................................................................................................ 18 Spacecraft ………………………………………………..................…..……...........……… 20 Science Objectives …………………………………..................……………...…..........….. 28 Why Stardust?..................…………………………..................………….....………............... 31 Other Comet Missions .......................................................................................... 33 NASA's Discovery Program .................................................................................. 36 Program/Project Management …………………………........................…..…..………...... 40 1 2 GENERAL RELEASE: NASA PREPARES FOR RETURN OF INTERSTELLAR CARGO NASA’s Stardust mission is nearing Earth after a 2.88 billion mile round-trip journey -

The Power of Sample Return Missions - Stardust and Hayabusa
The Molecular Universe Proceedings IAU Symposium No. 280, 2011 c International Astronomical Union 2011 Jos´e Cernicharo & Rafael Bachiller, eds. doi:10.1017/S174392131102504X The Power of Sample Return Missions - Stardust and Hayabusa Scott A. Sandford1 1 Astrophysics Branch, NASA-Ames Research Center, Mail Stop 245-6, Moffett Field, CA 94035 USA email: [email protected] Abstract. Sample return missions offer opportunities to learn things about other objects in our Solar System (and beyond) that cannot be determined by observations using in situ spacecraft. This is largely because the returned samples can be studied in terrestrial laboratories where the analyses are not limited by the constraints - power, mass, time, precision, etc. - imposed by normal spacecraft operations. In addition, the returned samples serve as a scientific resource that is available far into the future; the study of the samples can continue long after the original spacecraft mission is finished. This means the samples can be continually revisited as both our scientific understanding and analytical techniques improve with time. These advantages come with some additional difficulties, however. In particular, sample return missions must deal with the additional difficulties of proximity operations near the objects they are to sample, and they must be capable of successfully making a round trip between the Earth and the sampled object. Such missions therefore need to take special precautions against unique hazards and be designed to successfully complete relatively extended mission durations. Despite these difficulties, several recent missions have managed to successfully complete sam- ple returns from a number of Solar System objects. These include the Stardust mission (samples from Comet 81P/Wild 2), the Hayabusa mission (samples from asteroid 25143 Itokawa), and the Genesis mission (samples of solar wind). -

Dawn Mission to Vesta and Ceres Symbiosis Between Terrestrial Observations and Robotic Exploration
Earth Moon Planet (2007) 101:65–91 DOI 10.1007/s11038-007-9151-9 Dawn Mission to Vesta and Ceres Symbiosis between Terrestrial Observations and Robotic Exploration C. T. Russell Æ F. Capaccioni Æ A. Coradini Æ M. C. De Sanctis Æ W. C. Feldman Æ R. Jaumann Æ H. U. Keller Æ T. B. McCord Æ L. A. McFadden Æ S. Mottola Æ C. M. Pieters Æ T. H. Prettyman Æ C. A. Raymond Æ M. V. Sykes Æ D. E. Smith Æ M. T. Zuber Received: 21 August 2007 / Accepted: 22 August 2007 / Published online: 14 September 2007 Ó Springer Science+Business Media B.V. 2007 Abstract The initial exploration of any planetary object requires a careful mission design guided by our knowledge of that object as gained by terrestrial observers. This process is very evident in the development of the Dawn mission to the minor planets 1 Ceres and 4 Vesta. This mission was designed to verify the basaltic nature of Vesta inferred both from its reflectance spectrum and from the composition of the howardite, eucrite and diogenite meteorites believed to have originated on Vesta. Hubble Space Telescope observations have determined Vesta’s size and shape, which, together with masses inferred from gravitational perturbations, have provided estimates of its density. These investigations have enabled the Dawn team to choose the appropriate instrumentation and to design its orbital operations at Vesta. Until recently Ceres has remained more of an enigma. Adaptive-optics and HST observations now have provided data from which we can begin C. T. Russell (&) IGPP & ESS, UCLA, Los Angeles, CA 90095-1567, USA e-mail: [email protected] F. -

Astronomical Observability of the Cassini Entry Into Saturn
1 7/25/2017 Astronomical Observability of the Cassini Entry into Saturn Ralph D. Lorenz Johns Hopkins Applied Physics Laboratory Laurel, MD 20723, USA [email protected] Abstract The Cassini spacecraft will enter Saturn's atmosphere on 15 th September 2017. This event may be visible from Earth as a 'meteor' flash, and entry dynamics simulations and results from observation of spacecraft entries at Earth are summarized to develop expectations for astronomical observability. 2 1. Cassini End of Mission Scenario Cassini was originally designed to perform a 4-year exploration of the Saturnian system, after arrival in 2004 and delivering the Huygens probe to Titan. Robust design and a rich scientific return have permitted and motivated two mission extensions, first to 2010 and later to 2017. At this point, systems and instruments, although generally performing very well, are well beyond their qualification lifetimes. Electrical power has been slowly declining (restricting the number of instruments that can operate simultaneously), but most importantly the propellants for manoeuvres and attitude control have been depleted. Planetary protection considerations require the radioisotope-powered spacecraft to be disposed of in a controlled manner that will preclude the contamination of Saturn moons that have potentially habitable environments, notably Titan and Enceladus. As with Galileo at Jupiter in 2003, the chosen plan is to direct the spacecraft to enter the primary planet's atmosphere. The endgame part of Cassini's orbital tour (the "Grand Finale") was designed (e.g. Yam et al., 2009) with a series of orbits with apoapsis near Titan's orbit, permitting continued observations towards the summer solstice, and periapsis initially outside the F-ring, with a gravity assist from a final close Titan encounter (T126, in April 2017) shifting the periapsis to within the D-ring, i.e. -
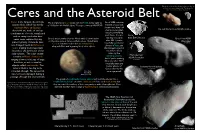
Ceres Is the Largest Object in the Asteroid Belt, Which Lies Mainly
Dactyl, the moon of Ida, is shown below in a close-up and at its true size relative to Ida. Dactyl was the Ceres and the Asteroid Belt first asteroid moon to be discovered. Ceres is the largest object in the The best photos of Ceres (below left) and Vesta (below right) as As of 2008, only the asteroid belt, which lies mainly of 2008, from the Hubble Space Telescope (courtesy NASA/ESA) handful of asteroids between Mars and Jupiter. shown here have had Ida and Dactyl, from NASA’s Galileo Asteroids are made of various their pictures taken combinations of rocks, metals and by spacecraft flying carbon compounds that have past them. If you’re Steins, Ceres is much smaller than the Moon, which is shown below reading this panel from ESA’s Rosetta Eros, from NEAR never been captured by any after 2011, you’ve planet’s gravity. Asteroids have on the same scale as Ceres and Vesta above. Nonetheless, Shoemaker Ceres is sometimes referred to as a dwarf planet, hopefully seen better (NASA/JHUAPL) not changed much for billions of along with Pluto and a growing list of other objects. photos of Vesta, the years, making them important third-largest object in records of the formation of the the asteroid belt, solar system. The solar system taken by the Mathilde, from contains millions of asteroids Dawn spacecraft. And if you’re reading NEAR Shoemaker ranging down to the size of large (NASA/JHUAPL) this panel after 2015, boulders, as well as smaller hopefully there are objects called meteoroids. -
Studying Stardust with a Microscope Thomas Zega Es Are in the Proportion of Forms ABOUT the SCIENTIST SPECIAL to the ARIZONA DAILY STAR of Elements Called Isotopes
Issue Date: of// 1166 • UUNIVERSITYNIVERSITY O OFF A ARIZONARIZONA C COLLEGEOLLEGE O OFF S SCIENCECIENCE SSunday,unday, N Novemberovember 3 30,0, 2 2014014 / A ARIZONARIZONA D DAILYAILY S STARTAR DEPARTMENT OF PLANETARY SCIENCES/LUNAR AND PLANETARY LABORATORY Studying stardust with a microscope Thomas Zega es are in the proportion of forms ABOUT THE SCIENTIST SPECIAL TO THE ARIZONA DAILY STAR of elements called isotopes. My When people think of astron- colleagues and I use an instru- Thomas Zega is omy, they often picture scien- ment called a secondary ion a University of tists using telescopes such as mass spectrometer to probe the Arizona assistant the Large Binocular Telescope composition of meteorite pieces professor in the on Mt. Graham to examine the as small as 50 nanometers (1 nm Lunar and Plan- light emitted by stars outside = 0.000000001 meters). If the etary Laboratory the solar system. dust speck has the right isotopic and principal Scientists use measurements composition, we know we have a investigator of from such telescopes to glean piece of stardust. the Planetary Materials Research a wealth of information about By comparing the stardust Group. The group’s research focuses a star, including what stage it grain’s composition to theoreti- on understanding the chemistry of the is in its lifecycle, its size and its cal predictions, we can infer the early solar system and ancient stars chemical makeup. kind of star the grain came from, and surface processes on the moon Astronomers must make such its mass, its evolutionary state, and asteroids. He uses advanced elec- measurements remotely because and its bulk chemical makeup. -
Autonomous Navigation for Deep Space Missions
Autonomous Navigation for Deep Space Missions Dr. Shyam Bhaskaran Mission Design and Navigation Section Jet Propulsion Laboratory California Institute of Technology Background on Deep Space Navigation • Spacecraft have visited 8 planets, asteroids and comets • Navigation (determining where the spacecraft is at any given time, controlling its path to achieve desired targets), performed using ground- in-the-loop techniques – Data includes 2-way radiometric (Doppler, range), interferometric (Delta- Differential One-way Range), and optical (images of natural bodies taken by onboard camera) – Data received on the ground, processed to determine orbit, commands sent to execute maneuvers to control orbit • Current capabilities can achieve highly accurate results, for example: – km level targeting accuracies for satellite flybys on Cassini mission – 10s of km landing ellipses on Mars • Need still to keep increasing performance for future missions SpaceOps 2012, Stockholm, Sweden, June 11-15, 2012 2 Drawbacks to Ground-based Navigation • Long round-trip light time (many minutes to many hours), depending on where the spacecraft is in Solar System • Time needed to process the data by analysts – Orbit determination and maneuver calculations – Analyze results – Convene meetings to make decisions and implement decisions – Generate sequence commands and uplink them to spacecraft • Lag time between the last navigation update and implementing maneuvers can typically take 8 or more hours to over a week. As a result: – Loss of some science, for example, to -

We Are Stardust … Concentrated by Earth!
[Expositions 8.1 (2014) 70–84] Expositions (online) ISSN: 1747–5376 We Are Stardust … Concentrated by Earth! WALTER ALVAREZ University of California, Berkeley The audacious aim of the emerging field of big history is to see all of the past as a unified field of study, combining insights from cosmology, astronomy, geology, paleontology, molecular evolution, paleoanthropology, archaeology, and all the fields of humanistic history, in order to achieve a whole new level of understanding of the human situation. Big History: Between Nothing and Everything, by David Christian, Cynthia Stokes Brown, and Craig Benjamin (2013), is the first textbook for this new academic field. Having taught big history at Berkeley and seen the enormous enthusiasm it engenders in students who crave to see the world in broad perspective, I am pleased that we now have a book suitable for big history courses, but as a geologist, my (predictable!) complaint is that it could have told more about the fascinating history of Earth. Although big history includes the regimes of Cosmos, Earth, Life, and Humanity, it is inherently anthropocentric, because we humans are doing the writing and because we know nothing about the histories that have unfolded on planets around other stars in this and other galaxies. The centrality of humans is clear from the Christian-Brown-Benjamin book, where human beings are the focus of three quarters of the book. As a result, the history of Earth, the only possible home for humans far into the foreseeable future, gets only a few pages. The information presented about our Earth—especially about the evolution of the atmosphere and about plate tectonics—is relevant and important to know, but it is just the beginning of the fascinating history of the earth that geologists have dug up.