The Rotation and Interior Structure Experiment on the Insight Mission to Mars
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Journey to Mars: How Donna Shirley Broke Barriers for Women in Space Engineering
The Journey to Mars: How Donna Shirley Broke Barriers for Women in Space Engineering Laurel Mossman, Kate Schein, and Amelia Peoples Senior Division Group Documentary Word Count: 499 Our group chose the topic, Donna Shirley and her Mars rover, because of our connections and our interest level in not only science but strong, determined women. One of our group member’s mothers worked for a man under Ms. Shirley when she was developing the Mars rover. This provided us with a connection to Ms. Shirley, which then gave us the amazing opportunity to interview her. In addition, our group is interested in the philosophy of equality and we have continuously created documentaries that revolve around this idea. Every member of our group is a female, so we understand the struggles and discrimination that women face in an everyday setting and wanted to share the story of a female that faced these struggles but overcame them. Thus after conducting a great amount of research, we fell in love with Donna Shirley’s story. Lastly, it was an added benefit that Ms. Shirley is from Oklahoma, making her story important to our state. All of these components made this topic extremely appealing to us. We conducted our research using online articles, Donna Shirley’s autobiography, “Managing Martians”, news coverage from the launch day, and our interview with Donna Shirley. We started our research process by reading Shirley’s autobiography. This gave us insight into her college life, her time working at the Jet Propulsion Laboratory, and what it was like being in charge of such a barrier-breaking mission. -

Columbus Crater HLS2 Hangout: Exploration Zone Briefing
Columbus Crater HLS2 Hangout: Exploration Zone Briefing Kennda Lynch1,2, Angela Dapremont2, Lauren Kimbrough2, Alex Sessa2, and James Wray2 1Lunar and Planetary Institute/Universities Space Research Association 2Georgia Institute of Technology Columbus Crater: An Overview • Groundwater-fed paleolake located in northwest region of Terra Sirenum • ~110 km in diameter • Diversity of Noachian & Hesperian aged deposits and outcrops • High diversity of aqueous mineral deposits • Estimated 1.5 km depth of sedimentary and/or volcanic infill • High Habitability and Biosignature Preservation Potential LZ & Field Station Latitude: 194.0194 E Longitude: 29.2058 S Altitude: +910 m SROI #1 RROI #1 LZ/HZ SROI #4 SROI #2 SROI #5 22 KM HiRISE Digital Terrain Model (DTM) • HiRISE DTMs are made from two images of the same area on the ground, taken from different look angles (known as a stereo-pair) • DTM’s are powerful research tools that allow researchers to take terrain measurements and model geological processes • For our traversability analysis of Columbus: • The HiRISE DTM was processed and completed by the University of Arizona HiRISE Operations Center. • DTM data were imported into ArcMap 10.5 software and traverses were acquired and analyzed using the 3D analyst tool. • A slope map was created in ArcMap to assess slope values along traverses as a supplement to topography observations. Slope should be ≤30°to meet human mission requirements. Conclusions Traversability • 9 out of the 17 traverses analyzed met the slope criteria for human missions. • This region of Columbus Crater is traversable and allows access to regions of astrobiological interest. It is also a possible access point to other regions of Terra Sirenum. -

Long-Range Rovers for Mars Exploration and Sample Return
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA’s newly reformulated Mars Exploration Program (MEP). These rovers are currently scheduled for launch first in 2007 as part of a joint science and technology mission, and then again in 2011 as part of a planned Mars Sample Return (MSR) mission. These rovers are characterized by substantially longer range capability than their predecessors in the 1997 Mars Pathfinder and 2003 Mars Exploration Rover (MER) missions. Topics addressed in this paper include the rover mission objectives, key design features, and Figure 1: Rover Size Comparison (Mars Pathfinder, Mars Exploration technologies. Rover, ’07 Smart Lander/Mobile Laboratory) INTRODUCTION NASA is leading a multinational program to explore above, below, and on the surface of Mars. A new The first of these rovers, the Smart Lander/Mobile architecture for the Mars Exploration Program has Laboratory (SLML) is scheduled for launch in 2007. The recently been announced [1], and it incorporates a current program baseline is to use this mission as a joint number of missions through the rest of this decade and science and technology mission that will contribute into the next. Among those missions are ambitious plans directly toward sample return missions planned for the to land rovers on the surface of Mars, with several turn of the decade. These sample return missions may purposes: (1) perform scientific explorations of the involve a rover of almost identical architecture to the surface; (2) demonstrate critical technologies for 2007 rover, except for the need to cache samples and collection, caching, and return of samples to Earth; (3) support their delivery into orbit for subsequent return to evaluate the suitability of the planet for potential manned Earth. -

EROSION and BASIN MODIFICATION of SMALLER COMPLEX CRATERS in the ISIDIS REGION, MARS. J.A. Mclaughlin1 and A.K. Davatzes2, 1Temp
Lunar and Planetary Science XLVIII (2017) 1190.pdf EROSION AND BASIN MODIFICATION OF SMALLER COMPLEX CRATERS IN THE ISIDIS REGION, MARS. J.A. McLaughlin1 and A.K. Davatzes2, 1Temple University, [email protected], 2Temple University, [email protected]. Introduction: Crater erosion and morphology are Level of Degradation (LOD) was defined for each indicators of the climatic and erosional history of the crater using depth to diameter ratios (d/D) and percent- area in which the crater is found [1][2]. Here we pre- age of crater rim remaining. This categorizes craters sent a detailed analysis of crater erosion and morphol- into four types; 1 is the least degraded and 4 is the ogy in the Isidis Planitia Basin region. The goal of this most degraded. Criteria are based on the following: work is to produce a thorough database of crater prop- erties and document the modification processes that dominate locally and regionally. Crater degradation, age, and geomorphology are all considered and cross- correlated to narrow down the timing and dominance of persistent fluvial, lacustrine, and volcanic processes Floor features are complex and variable, but struc- on Mars. These geologic processes modify the crater tures indicative of the following processes were identi- rims and floor, often in distinguishable ways that pro- fied: Volcanic, Aeolian, Impact, Glacial, Mass Wast- vide insight into past environmental conditions. These ing, and Water Interaction. When possible, percent environments may hold clues to past habitable envi- floor cover of features such as lava flows, mass wast- ronments that are of particular interest for future mis- ing, dune and dust coverage were documented. -

A Unified Plane Coordinate Reference System
This dissertation has been microfilmed exactly as received COLVOCORESSES, Alden Partridge, 1918- A UNIFIED PLANE COORDINATE REFERENCE SYSTEM. The Ohio State University, Ph.D., 1965 Geography University Microfilms, Inc., Ann Arbor, Michigan A UNIFIED PLANE COORDINATE REFERENCE SYSTEM DISSERTATION Presented in Partial Fulfillment of the Requirements for The Degree Doctor of Philosophy in the Graduate School of The Ohio State University Alden P. Colvocoresses, B.S., M.Sc. Lieutenant Colonel, Corps of Engineers United States Army * * * * * The Ohio State University 1965 Approved by Adviser Department of Geodetic Science PREFACE This dissertation was prepared while the author was pursuing graduate studies at The Ohio State University. Although attending school under order of the United States Army, the views and opinions expressed herein represent solely those of the writer. A list of individuals and agencies contributing to this paper is presented as Appendix B. The author is particularly indebted to two organizations, The Ohio State University and the Army Map Service. Without the combined facilities of these two organizations the preparation of this paper could not have been accomplished. Dr. Ivan Mueller of the Geodetic Science Department of The Ohio State University served as adviser and provided essential guidance and counsel. ii VITA September 23, 1918 Born - Humboldt, Arizona 1941 oo.oo.o BoS. in Mining Engineering, University of Arizona 1941-1945 .... Military Service, European Theatre 1946-1950 o . o Mining Engineer, Magma Copper -

Case Fil Copy
NASA TECHNICAL NASA TM X-3511 MEMORANDUM CO >< CASE FIL COPY REPORTS OF PLANETARY GEOLOGY PROGRAM, 1976-1977 Compiled by Raymond Arvidson and Russell Wahmann Office of Space Science NASA Headquarters NATIONAL AERONAUTICS AND SPACE ADMINISTRATION • WASHINGTON, D. C. • MAY 1977 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. TMX3511 4. Title and Subtitle 5. Report Date May 1977 6. Performing Organization Code REPORTS OF PLANETARY GEOLOGY PROGRAM, 1976-1977 SL 7. Author(s) 8. Performing Organization Report No. Compiled by Raymond Arvidson and Russell Wahmann 10. Work Unit No. 9. Performing Organization Name and Address Office of Space Science 11. Contract or Grant No. Lunar and Planetary Programs Planetary Geology Program 13. Type of Report and Period Covered 12. Sponsoring Agency Name and Address Technical Memorandum National Aeronautics and Space Administration 14. Sponsoring Agency Code Washington, D.C. 20546 15. Supplementary Notes 16. Abstract A compilation of abstracts of reports which summarizes work conducted by Principal Investigators. Full reports of these abstracts were presented to the annual meeting of Planetary Geology Principal Investigators and their associates at Washington University, St. Louis, Missouri, May 23-26, 1977. 17. Key Words (Suggested by Author(s)) 18. Distribution Statement Planetary geology Solar system evolution Unclassified—Unlimited Planetary geological mapping Instrument development 19. Security Qassif. (of this report) 20. Security Classif. (of this page) 21. No. of Pages 22. Price* Unclassified Unclassified 294 $9.25 * For sale by the National Technical Information Service, Springfield, Virginia 22161 FOREWORD This is a compilation of abstracts of reports from Principal Investigators of NASA's Office of Space Science, Division of Lunar and Planetary Programs Planetary Geology Program. -

Peculiarities of the Chemical Abundance Distribution in Galaxies NGC 3963 and NGC 7292
MNRAS 505, 2009–2019 (2021) https://doi.org/10.1093/mnras/stab1414 Advance Access publication 2021 May 19 Peculiarities of the chemical abundance distribution in galaxies NGC 3963 and NGC 7292 A. S. Gusev ‹ and A. V. Dodin Sternberg Astronomical Institute, Lomonosov Moscow State University, Universitetsky pr. 13, 119234 Moscow, Russia Downloaded from https://academic.oup.com/mnras/article/505/2/2009/6278202 by Lomonosov Moscow State University user on 09 June 2021 Accepted 2021 May 11. in original form 2021 April 27 ABSTRACT Spectroscopic observations of 32 H II regions in the spiral galaxy NGC 3963 and the barred irregular galaxy NGC 7292 were carried out with the 2.5-m telescope of the Caucasus Mountain Observatory of the Sternberg Astronomical Institute using the Transient Double-beam Spectrograph with a dispersion of ≈1Åpixel−1 and a spectral resolution of ≈3 Å. These observations were used to estimate the oxygen and nitrogen abundances and the electron temperatures in H II regions through modern strong- line methods. In general, the galaxies have oxygen and nitrogen abundances typical of stellar systems with similar luminosities, sizes, and morphology. However, we have found some peculiarities in chemical abundance distributions in both galaxies. The distorted outer segment of the southern arm of NGC 3963 shows an excess oxygen and nitrogen abundances. Chemical elements abundances in NGC 7292 are constant and do not depend on the galactocentric distance. These peculiarities can be explained in terms of external gas accretion in the case of NGC 3963 and major merging for NGC 7292. Key words: ISM: abundances – H II regions – galaxies: abundances – galaxies: individual: NGC 3963, NGC 7292. -
Aquatic Ecomap Team to Develop the Framework, Process Comments, and Develop a Plan Forrevision.These Scientistsare
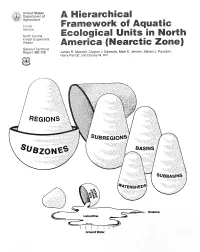
_i__¸_._. V_!_i Depa_"tment of e_a IC_ .-,4_:..._.A_..:,_,,_gricu 1t u_'e ServiceFo os Framewerku of Aquatim c North Centrai EC@J@g_CaJ U_itS _ N@_th Forest Experiment s [] Station A_er_ca {Nearct_c Z@_e_ General Technical Report NC-17'6 James R. Maxwell, Clayton J. Edwards, Mark E. Jensen, Steven J. Paustian, Harry Parrott, and Donley M. Hitl 8 • _ ...... "'::'":' i:. "S" " : ":','1 _ . / REG I0 NS':_; '"::;:s_:::."_--. .---..:-:!.!:::!:.::_:. ..... •. :.,.:,: .,. -,::.:, .......,.-,.-4S:ifi -.- i::ti/;:.:_: """.::""-:.: .... "':::.:.';.i" . :':" "':":": -. -._ . •....:...{: • . ...:" ZON • .- "." . .. • " . "'...:.:. • .....:....:....:_..-:..:):. -.-. ..... ,:.':::'.':: . .., .... '"_::.--..:.:i i ''_{:;ti}{i_:/.... sub " ,Lri_;gi, • Riverine GroundWater II II _ II I III II I II ],.r ', _ _r',_-- ACFA_OV_rLEDGI_NTS The authors wish to thank the many scientistswho commented on the draftsof thispaper during itspreparation. Their comments dramatically improved the qualiW of the product. These scientistsare listedin Appen- dix F. Specialthanks are offeredto 10 of these scientists,who met with the Aquatic Ecomap team to develop the framework, process comments, and develop a plan forrevision.These scientistsare: Patrick Bourgeron, The Nature Conservancy, Boulder, CO (geoclimatic) James Deacon, Universityof Nevada, Las Vegas, NV (zoogeography) Iris Goodman, Environmental Protection Agency, Las Vegas, NV (ground water) Gordon Grant, Forest Service, Corvallis, OR [riverine) Richard Lillie, Wisconsin Department of Natural Resources, Winona, WI (lacustrine) W.L. Minckley, Arizona State University, Tempe, AZ (zoogeography) Kerry Overton, Forest Service, Boise, [D (riverine) Nick Schmal, Forest Service, Laramie, WY (riverine, lacustrine) Steven Walsh, Fish and Wildlife Service, Gainesville, FL (zoogeography) Mike Wireman, Environmental Protection Agency, Denver, CO (ground water) We wish to especially acknowledge the contributions of Mike Wireman and Iris Goodman of the Environmental Protection Agency. -

Mineralogy of the Martian Surface
EA42CH14-Ehlmann ARI 30 April 2014 7:21 Mineralogy of the Martian Surface Bethany L. Ehlmann1,2 and Christopher S. Edwards1 1Division of Geological & Planetary Sciences, California Institute of Technology, Pasadena, California 91125; email: [email protected], [email protected] 2Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California 91109 Annu. Rev. Earth Planet. Sci. 2014. 42:291–315 Keywords First published online as a Review in Advance on Mars, composition, mineralogy, infrared spectroscopy, igneous processes, February 21, 2014 aqueous alteration The Annual Review of Earth and Planetary Sciences is online at earth.annualreviews.org Abstract This article’s doi: The past fifteen years of orbital infrared spectroscopy and in situ exploration 10.1146/annurev-earth-060313-055024 have led to a new understanding of the composition and history of Mars. Copyright c 2014 by Annual Reviews. Globally, Mars has a basaltic upper crust with regionally variable quanti- by California Institute of Technology on 06/09/14. For personal use only. All rights reserved ties of plagioclase, pyroxene, and olivine associated with distinctive terrains. Enrichments in olivine (>20%) are found around the largest basins and Annu. Rev. Earth Planet. Sci. 2014.42:291-315. Downloaded from www.annualreviews.org within late Noachian–early Hesperian lavas. Alkali volcanics are also locally present, pointing to regional differences in igneous processes. Many ma- terials from ancient Mars bear the mineralogic fingerprints of interaction with water. Clay minerals, found in exposures of Noachian crust across the globe, preserve widespread evidence for early weathering, hydrothermal, and diagenetic aqueous environments. Noachian and Hesperian sediments include paleolake deposits with clays, carbonates, sulfates, and chlorides that are more localized in extent. -

Implications for Gale Crater's Geochemistry
First detection of fluorine on Mars: Implications for Gale Crater’s geochemistry Olivier Forni, Michael Gaft, Michael Toplis, Samuel Clegg, Sylvestre Maurice, Roger Wiens, Nicolas Mangold, Olivier Gasnault, Violaine Sautter, Stéphane Le Mouélic, et al. To cite this version: Olivier Forni, Michael Gaft, Michael Toplis, Samuel Clegg, Sylvestre Maurice, et al.. First detection of fluorine on Mars: Implications for Gale Crater’s geochemistry. Geophysical Research Letters, American Geophysical Union, 2015, 42 (4), pp.1020-1028. 10.1002/2014GL062742. hal-02373397 HAL Id: hal-02373397 https://hal.archives-ouvertes.fr/hal-02373397 Submitted on 8 Jul 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Copyright PUBLICATIONS Geophysical Research Letters RESEARCH LETTER First detection of fluorine on Mars: Implications 10.1002/2014GL062742 for Gale Crater’s geochemistry Key Points: Olivier Forni1,2, Michael Gaft3, Michael J. Toplis1,2, Samuel M. Clegg4, Sylvestre Maurice1,2, • fl First detection of uorine at the 4 5 1,2 6 5 Martian surface Roger C. Wiens , Nicolas Mangold , Olivier Gasnault , Violaine Sautter , Stéphane Le Mouélic , 1,2 5 4 7 4 • High sensitivity of fluorine detection Pierre-Yves Meslin , Marion Nachon , Rhonda E. -

Open Research Online Oro.Open.Ac.Uk
Open Research Online The Open University’s repository of research publications and other research outputs Habitability of hydrothermal systems at Jezero and Gusev Craters as constrained by hydrothermal alteration of a terrestrial mafic dike Journal Item How to cite: Costello, Lacey J.; Filiberto, Justin; Crandall, Jake R.; Potter-McIntyre, Sally L.; Schwenzer, Susanne P.; Miller, Michael A.; Hummer, Daniel R.; Olsson-Francis, Karen and Perl, Scott (2020). Habitability of hydrothermal systems at Jezero and Gusev Craters as constrained by hydrothermal alteration of a terrestrial mafic dike. Geochemistry (Early access). For guidance on citations see FAQs. c 2020 The Authors https://creativecommons.org/licenses/by-nc-nd/4.0/ Version: Version of Record Link(s) to article on publisher’s website: http://dx.doi.org/doi:10.1016/j.chemer.2020.125613 Copyright and Moral Rights for the articles on this site are retained by the individual authors and/or other copyright owners. For more information on Open Research Online’s data policy on reuse of materials please consult the policies page. oro.open.ac.uk Geochemistry xxx (xxxx) xxxx Contents lists available at ScienceDirect Geochemistry journal homepage: www.elsevier.com/locate/chemer Habitability of hydrothermal systems at Jezero and Gusev Craters as constrained by hydrothermal alteration of a terrestrial mafic dike Lacey J. Costelloa,1, Justin Filibertob,*, Jake R. Crandallc, Sally L. Potter-McIntyrea, Susanne P. Schwenzerd, Michael A. Millere, Daniel R. Hummera, Karen Olsson-Francisd, Scott Perlf a -

Insight Spacecraft Launch for Mission to Interior of Mars
InSight Spacecraft Launch for Mission to Interior of Mars InSight is a robotic scientific explorer to investigate the deep interior of Mars set to launch May 5, 2018. It is scheduled to land on Mars November 26, 2018. It will allow us to better understand the origin of Mars. First Launch of Project Orion Project Orion took its first unmanned mission Exploration flight Test-1 (EFT-1) on December 5, 2014. It made two orbits in four hours before splashing down in the Pacific. The flight tested many subsystems, including its heat shield, electronics and parachutes. Orion will play an important role in NASA's journey to Mars. Orion will eventually carry astronauts to an asteroid and to Mars on the Space Launch System. Mars Rover Curiosity Lands After a nine month trip, Curiosity landed on August 6, 2012. The rover carries the biggest, most advanced suite of instruments for scientific studies ever sent to the martian surface. Curiosity analyzes samples scooped from the soil and drilled from rocks to record of the planet's climate and geology. Mars Reconnaissance Orbiter Begins Mission at Mars NASA's Mars Reconnaissance Orbiter launched from Cape Canaveral August 12. 2005, to find evidence that water persisted on the surface of Mars. The instruments zoom in for photography of the Martian surface, analyze minerals, look for subsurface water, trace how much dust and water are distributed in the atmosphere, and monitor daily global weather. Spirit and Opportunity Land on Mars January 2004, NASA landed two Mars Exploration Rovers, Spirit and Opportunity, on opposite sides of Mars.