Leonhard Euler and Johann Bernoulli Solving Homogenous Higher Order Linear Differential Equations with Constant Coefficients
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Introduction to Differential Equations
Introduction to Differential Equations Lecture notes for MATH 2351/2352 Jeffrey R. Chasnov k kK m m x1 x2 The Hong Kong University of Science and Technology The Hong Kong University of Science and Technology Department of Mathematics Clear Water Bay, Kowloon Hong Kong Copyright ○c 2009–2016 by Jeffrey Robert Chasnov This work is licensed under the Creative Commons Attribution 3.0 Hong Kong License. To view a copy of this license, visit http://creativecommons.org/licenses/by/3.0/hk/ or send a letter to Creative Commons, 171 Second Street, Suite 300, San Francisco, California, 94105, USA. Preface What follows are my lecture notes for a first course in differential equations, taught at the Hong Kong University of Science and Technology. Included in these notes are links to short tutorial videos posted on YouTube. Much of the material of Chapters 2-6 and 8 has been adapted from the widely used textbook “Elementary differential equations and boundary value problems” by Boyce & DiPrima (John Wiley & Sons, Inc., Seventh Edition, ○c 2001). Many of the examples presented in these notes may be found in this book. The material of Chapter 7 is adapted from the textbook “Nonlinear dynamics and chaos” by Steven H. Strogatz (Perseus Publishing, ○c 1994). All web surfers are welcome to download these notes, watch the YouTube videos, and to use the notes and videos freely for teaching and learning. An associated free review book with links to YouTube videos is also available from the ebook publisher bookboon.com. I welcome any comments, suggestions or corrections sent by email to [email protected]. -

The Bernoulli Edition the Collected Scientific Papers of the Mathematicians and Physicists of the Bernoulli Family
Bernoulli2005.qxd 24.01.2006 16:34 Seite 1 The Bernoulli Edition The Collected Scientific Papers of the Mathematicians and Physicists of the Bernoulli Family Edited on behalf of the Naturforschende Gesellschaft in Basel and the Otto Spiess-Stiftung, with support of the Schweizerischer Nationalfonds and the Verein zur Förderung der Bernoulli-Edition Bernoulli2005.qxd 24.01.2006 16:34 Seite 2 The Scientific Legacy Èthe Bernoullis' contributions to the theory of oscillations, especially Daniel's discovery of of the Bernoullis the main theorems on stationary modes. Johann II considered, but rejected, a theory of Modern science is predominantly based on the transversal wave optics; Jacob II came discoveries in the fields of mathematics and the tantalizingly close to formulating the natural sciences in the 17th and 18th centuries. equations for the vibrating plate – an Eight members of the Bernoulli family as well as important topic of the time the Bernoulli disciple Jacob Hermann made Èthe important steps Daniel Bernoulli took significant contributions to this development in toward a theory of errors. His efforts to the areas of mathematics, physics, engineering improve the apparatus for measuring the and medicine. Some of their most influential inclination of the Earth's magnetic field led achievements may be listed as follows: him to the first systematic evaluation of ÈJacob Bernoulli's pioneering work in proba- experimental errors bility theory, which included the discovery of ÈDaniel's achievements in medicine, including the Law of Large Numbers, the basic theorem the first computation of the work done by the underlying all statistical analysis human heart. -

The Bernoulli Family
Mathematical Discoveries of the Bernoulli Brothers Caroline Ellis Union University MAT 498 November 30, 2001 Bernoulli Family Tree Nikolaus (1623-1708) Jakob I Nikolaus I Johann I (1654-1705) (1662-1716) (1667-1748) Nikolaus II Nikolaus III Daniel I Johann II (1687-1759) (1695-1726) (1700-1782) (1710-1790) This Swiss family produced eight mathematicians in three generations. We will focus on some of the mathematical discoveries of Jakob l and his brother Johann l. Some History Nikolaus Bernoulli wanted Jakob to be a Protestant pastor and Johann to be a doctor. They obeyed their father and earned degrees in theology and medicine, respectively. But… Some History, cont. Jakob and Johann taught themselves the “new math” – calculus – from Leibniz‟s notes and papers. They started to have contact with Leibniz, and are now known as his most important students. http://www-history.mcs.st-andrews.ac.uk/history/PictDisplay/Leibniz.html Jakob Bernoulli (1654-1705) learned about mathematics and astronomy studied Descarte‟s La Géometrie, John Wallis‟s Arithmetica Infinitorum, and Isaac Barrow‟s Lectiones Geometricae convinced Leibniz to change the name of the new math from calculus sunmatorius to calculus integralis http://www-history.mcs.st-andrews.ac.uk/history/PictDisplay/Bernoulli_Jakob.html Johann Bernoulli (1667-1748) studied mathematics and physics gave calculus lessons to Marquis de L‟Hôpital Johann‟s greatest student was Euler won the Paris Academy‟s biennial prize competition three times – 1727, 1730, and 1734 http://www-history.mcs.st-andrews.ac.uk/history/PictDisplay/Bernoulli_Johann.html Jakob vs. Johann Johann Bernoulli had greater intuitive power and descriptive ability Jakob had a deeper intellect but took longer to arrive at a solution Famous Problems the catenary (hanging chain) the brachistocrone (shortest time) the divergence of the harmonic series (1/n) The Catenary: Hanging Chain Jakob Bernoulli Galileo guessed that proposed this problem this curve was a in the May 1690 edition parabola, but he never of Acta Eruditorum. -

3 Runge-Kutta Methods
3 Runge-Kutta Methods In contrast to the multistep methods of the previous section, Runge-Kutta methods are single-step methods — however, with multiple stages per step. They are motivated by the dependence of the Taylor methods on the specific IVP. These new methods do not require derivatives of the right-hand side function f in the code, and are therefore general-purpose initial value problem solvers. Runge-Kutta methods are among the most popular ODE solvers. They were first studied by Carle Runge and Martin Kutta around 1900. Modern developments are mostly due to John Butcher in the 1960s. 3.1 Second-Order Runge-Kutta Methods As always we consider the general first-order ODE system y0(t) = f(t, y(t)). (42) Since we want to construct a second-order method, we start with the Taylor expansion h2 y(t + h) = y(t) + hy0(t) + y00(t) + O(h3). 2 The first derivative can be replaced by the right-hand side of the differential equation (42), and the second derivative is obtained by differentiating (42), i.e., 00 0 y (t) = f t(t, y) + f y(t, y)y (t) = f t(t, y) + f y(t, y)f(t, y), with Jacobian f y. We will from now on neglect the dependence of y on t when it appears as an argument to f. Therefore, the Taylor expansion becomes h2 y(t + h) = y(t) + hf(t, y) + [f (t, y) + f (t, y)f(t, y)] + O(h3) 2 t y h h = y(t) + f(t, y) + [f(t, y) + hf (t, y) + hf (t, y)f(t, y)] + O(h3(43)). -

Runge-Kutta Scheme Takes the Form K1 = Hf (Tn, Yn); K2 = Hf (Tn + Αh, Yn + Βk1); (5.11) Yn+1 = Yn + A1k1 + A2k2
Approximate integral using the trapezium rule: h Y (t ) ≈ Y (t ) + [f (t ; Y (t )) + f (t ; Y (t ))] ; t = t + h: n+1 n 2 n n n+1 n+1 n+1 n Use Euler's method to approximate Y (tn+1) ≈ Y (tn) + hf (tn; Y (tn)) in trapezium rule: h Y (t ) ≈ Y (t ) + [f (t ; Y (t )) + f (t ; Y (t ) + hf (t ; Y (t )))] : n+1 n 2 n n n+1 n n n Hence the modified Euler's scheme 8 K1 = hf (tn; yn) > h <> y = y + [f (t ; y ) + f (t ; y + hf (t ; y ))] , K2 = hf (tn+1; yn + K1) n+1 n 2 n n n+1 n n n > K1 + K2 :> y = y + n+1 n 2 5.3.1 Modified Euler Method Numerical solution of Initial Value Problem: dY Z tn+1 = f (t; Y ) , Y (tn+1) = Y (tn) + f (t; Y (t)) dt: dt tn Use Euler's method to approximate Y (tn+1) ≈ Y (tn) + hf (tn; Y (tn)) in trapezium rule: h Y (t ) ≈ Y (t ) + [f (t ; Y (t )) + f (t ; Y (t ) + hf (t ; Y (t )))] : n+1 n 2 n n n+1 n n n Hence the modified Euler's scheme 8 K1 = hf (tn; yn) > h <> y = y + [f (t ; y ) + f (t ; y + hf (t ; y ))] , K2 = hf (tn+1; yn + K1) n+1 n 2 n n n+1 n n n > K1 + K2 :> y = y + n+1 n 2 5.3.1 Modified Euler Method Numerical solution of Initial Value Problem: dY Z tn+1 = f (t; Y ) , Y (tn+1) = Y (tn) + f (t; Y (t)) dt: dt tn Approximate integral using the trapezium rule: h Y (t ) ≈ Y (t ) + [f (t ; Y (t )) + f (t ; Y (t ))] ; t = t + h: n+1 n 2 n n n+1 n+1 n+1 n Hence the modified Euler's scheme 8 K1 = hf (tn; yn) > h <> y = y + [f (t ; y ) + f (t ; y + hf (t ; y ))] , K2 = hf (tn+1; yn + K1) n+1 n 2 n n n+1 n n n > K1 + K2 :> y = y + n+1 n 2 5.3.1 Modified Euler Method Numerical solution of Initial Value Problem: dY Z tn+1 = -

The Original Euler's Calculus-Of-Variations Method: Key
Submitted to EJP 1 Jozef Hanc, [email protected] The original Euler’s calculus-of-variations method: Key to Lagrangian mechanics for beginners Jozef Hanca) Technical University, Vysokoskolska 4, 042 00 Kosice, Slovakia Leonhard Euler's original version of the calculus of variations (1744) used elementary mathematics and was intuitive, geometric, and easily visualized. In 1755 Euler (1707-1783) abandoned his version and adopted instead the more rigorous and formal algebraic method of Lagrange. Lagrange’s elegant technique of variations not only bypassed the need for Euler’s intuitive use of a limit-taking process leading to the Euler-Lagrange equation but also eliminated Euler’s geometrical insight. More recently Euler's method has been resurrected, shown to be rigorous, and applied as one of the direct variational methods important in analysis and in computer solutions of physical processes. In our classrooms, however, the study of advanced mechanics is still dominated by Lagrange's analytic method, which students often apply uncritically using "variational recipes" because they have difficulty understanding it intuitively. The present paper describes an adaptation of Euler's method that restores intuition and geometric visualization. This adaptation can be used as an introductory variational treatment in almost all of undergraduate physics and is especially powerful in modern physics. Finally, we present Euler's method as a natural introduction to computer-executed numerical analysis of boundary value problems and the finite element method. I. INTRODUCTION In his pioneering 1744 work The method of finding plane curves that show some property of maximum and minimum,1 Leonhard Euler introduced a general mathematical procedure or method for the systematic investigation of variational problems. -
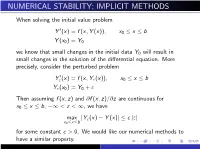
Numerical Stability; Implicit Methods
NUMERICAL STABILITY; IMPLICIT METHODS When solving the initial value problem 0 Y (x) = f (x; Y (x)); x0 ≤ x ≤ b Y (x0) = Y0 we know that small changes in the initial data Y0 will result in small changes in the solution of the differential equation. More precisely, consider the perturbed problem 0 Y"(x) = f (x; Y"(x)); x0 ≤ x ≤ b Y"(x0) = Y0 + " Then assuming f (x; z) and @f (x; z)=@z are continuous for x0 ≤ x ≤ b; −∞ < z < 1, we have max jY"(x) − Y (x)j ≤ c j"j x0≤x≤b for some constant c > 0. We would like our numerical methods to have a similar property. Consider the Euler method yn+1 = yn + hf (xn; yn) ; n = 0; 1;::: y0 = Y0 and then consider the perturbed problem " " " yn+1 = yn + hf (xn; yn ) ; n = 0; 1;::: " y0 = Y0 + " We can show the following: " max jyn − ynj ≤ cbj"j x0≤xn≤b for some constant cb > 0 and for all sufficiently small values of the stepsize h. This implies that Euler's method is stable, and in the same manner as was true for the original differential equation problem. The general idea of stability for a numerical method is essentially that given above for Eulers's method. There is a general theory for numerical methods for solving the initial value problem 0 Y (x) = f (x; Y (x)); x0 ≤ x ≤ b Y (x0) = Y0 If the truncation error in a numerical method has order 2 or greater, then the numerical method is stable if and only if it is a convergent numerical method. -

Leonhard Euler: His Life, the Man, and His Works∗
SIAM REVIEW c 2008 Walter Gautschi Vol. 50, No. 1, pp. 3–33 Leonhard Euler: His Life, the Man, and His Works∗ Walter Gautschi† Abstract. On the occasion of the 300th anniversary (on April 15, 2007) of Euler’s birth, an attempt is made to bring Euler’s genius to the attention of a broad segment of the educated public. The three stations of his life—Basel, St. Petersburg, andBerlin—are sketchedandthe principal works identified in more or less chronological order. To convey a flavor of his work andits impact on modernscience, a few of Euler’s memorable contributions are selected anddiscussedinmore detail. Remarks on Euler’s personality, intellect, andcraftsmanship roundout the presentation. Key words. LeonhardEuler, sketch of Euler’s life, works, andpersonality AMS subject classification. 01A50 DOI. 10.1137/070702710 Seh ich die Werke der Meister an, So sehe ich, was sie getan; Betracht ich meine Siebensachen, Seh ich, was ich h¨att sollen machen. –Goethe, Weimar 1814/1815 1. Introduction. It is a virtually impossible task to do justice, in a short span of time and space, to the great genius of Leonhard Euler. All we can do, in this lecture, is to bring across some glimpses of Euler’s incredibly voluminous and diverse work, which today fills 74 massive volumes of the Opera omnia (with two more to come). Nine additional volumes of correspondence are planned and have already appeared in part, and about seven volumes of notebooks and diaries still await editing! We begin in section 2 with a brief outline of Euler’s life, going through the three stations of his life: Basel, St. -

Leonhard Euler Moriam Yarrow
Leonhard Euler Moriam Yarrow Euler's Life Leonhard Euler was one of the greatest mathematician and phsysicist of all time for his many contributions to mathematics. His works have inspired and are the foundation for modern mathe- matics. Euler was born in Basel, Switzerland on April 15, 1707 AD by Paul Euler and Marguerite Brucker. He is the oldest of five children. Once, Euler was born his family moved from Basel to Riehen, where most of his childhood took place. From a very young age Euler had a niche for math because his father taught him the subject. At the age of thirteen he was sent to live with his grandmother, where he attended the University of Basel to receive his Master of Philosphy in 1723. While he attended the Universirty of Basel, he studied greek in hebrew to satisfy his father. His father wanted to prepare him for a career in the field of theology in order to become a pastor, but his friend Johann Bernouilli convinced Euler's father to allow his son to pursue a career in mathematics. Bernoulli saw the potentional in Euler after giving him lessons. Euler received a position at the Academy at Saint Petersburg as a professor from his friend, Daniel Bernoulli. He rose through the ranks very quickly. Once Daniel Bernoulli decided to leave his position as the director of the mathmatical department, Euler was promoted. While in Russia, Euler was greeted/ introduced to Christian Goldbach, who sparked Euler's interest in number theory. Euler was a man of many talents because in Russia he was learning russian, executed studies on navigation and ship design, cartography, and an examiner for the military cadet corps. -

Euler and His Work on Infinite Series
BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 44, Number 4, October 2007, Pages 515–539 S 0273-0979(07)01175-5 Article electronically published on June 26, 2007 EULER AND HIS WORK ON INFINITE SERIES V. S. VARADARAJAN For the 300th anniversary of Leonhard Euler’s birth Table of contents 1. Introduction 2. Zeta values 3. Divergent series 4. Summation formula 5. Concluding remarks 1. Introduction Leonhard Euler is one of the greatest and most astounding icons in the history of science. His work, dating back to the early eighteenth century, is still with us, very much alive and generating intense interest. Like Shakespeare and Mozart, he has remained fresh and captivating because of his personality as well as his ideas and achievements in mathematics. The reasons for this phenomenon lie in his universality, his uniqueness, and the immense output he left behind in papers, correspondence, diaries, and other memorabilia. Opera Omnia [E], his collected works and correspondence, is still in the process of completion, close to eighty volumes and 31,000+ pages and counting. A volume of brief summaries of his letters runs to several hundred pages. It is hard to comprehend the prodigious energy and creativity of this man who fueled such a monumental output. Even more remarkable, and in stark contrast to men like Newton and Gauss, is the sunny and equable temperament that informed all of his work, his correspondence, and his interactions with other people, both common and scientific. It was often said of him that he did mathematics as other people breathed, effortlessly and continuously. -
The Bernoullis and the Harmonic Series
The Bernoullis and The Harmonic Series By Candice Cprek, Jamie Unseld, and Stephanie Wendschlag An Exciting Time in Math l The late 1600s and early 1700s was an exciting time period for mathematics. l The subject flourished during this period. l Math challenges were held among philosophers. l The fundamentals of Calculus were created. l Several geniuses made their mark on mathematics. Gottfried Wilhelm Leibniz (1646-1716) l Described as a universal l At age 15 he entered genius by mastering several the University of different areas of study. Leipzig, flying through l A child prodigy who studied under his father, a professor his studies at such a of moral philosophy. pace that he completed l Taught himself Latin and his doctoral dissertation Greek at a young age, while at Altdorf by 20. studying the array of books on his father’s shelves. Gottfried Wilhelm Leibniz l He then began work for the Elector of Mainz, a small state when Germany divided, where he handled legal maters. l In his spare time he designed a calculating machine that would multiply by repeated, rapid additions and divide by rapid subtractions. l 1672-sent form Germany to Paris as a high level diplomat. Gottfried Wilhelm Leibniz l At this time his math training was limited to classical training and he needed a crash course in the current trends and directions it was taking to again master another area. l When in Paris he met the Dutch scientist named Christiaan Huygens. Christiaan Huygens l He had done extensive work on mathematical curves such as the “cycloid”. -

On the Euler Integral for the Positive and Negative Factorial
On the Euler Integral for the positive and negative Factorial Tai-Choon Yoon ∗ and Yina Yoon (Dated: Dec. 13th., 2020) Abstract We reviewed the Euler integral for the factorial, Gauss’ Pi function, Legendre’s gamma function and beta function, and found that gamma function is defective in Γ(0) and Γ( x) − because they are undefined or indefinable. And we came to a conclusion that the definition of a negative factorial, that covers the domain of the negative space, is needed to the Euler integral for the factorial, as well as the Euler Y function and the Euler Z function, that supersede Legendre’s gamma function and beta function. (Subject Class: 05A10, 11S80) A. The positive factorial and the Euler Y function Leonhard Euler (1707–1783) developed a transcendental progression in 1730[1] 1, which is read xedx (1 x)n. (1) Z − f From this, Euler transformed the above by changing e to g for generalization into f x g dx (1 x)n. (2) Z − Whence, Euler set f = 1 and g = 0, and got an integral for the factorial (!) 2, dx ( lx )n, (3) Z − where l represents logarithm . This is called the Euler integral of the second kind 3, and the equation (1) is called the Euler integral of the first kind. 4, 5 Rewriting the formula (3) as follows with limitation of domain for a positive half space, 1 1 n ln dx, n 0. (4) Z0 x ≥ ∗ Electronic address: [email protected] 1 “On Transcendental progressions that is, those whose general terms cannot be given algebraically” by Leonhard Euler p.3 2 ibid.