Pressure-Pair-Based Floor Localization System Using Barometric Sensors on Smartphones
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Key Technologies for Super Tall Building Construction: Lotte World Tower
ctbuh.org/papers Title: Key Technologies for Super Tall Building Construction: Lotte World Tower Authors: Gyu Dong Kim, LOTTE Engineering & Construction Joo Hoo Lee, LOTTE Engineering & Construction Subjects: Building Case Study Construction Keywords: Concrete Construction Foundation Supertall Publication Date: 2016 Original Publication: International Journal of High-Rise Buildings Volume 5 Number 3 Paper Type: 1. Book chapter/Part chapter 2. Journal paper 3. Conference proceeding 4. Unpublished conference paper 5. Magazine article 6. Unpublished © Council on Tall Buildings and Urban Habitat / Gyu Dong Kim; Joo Hoo Lee International Journal of High-Rise Buildings International Journal of September 2016, Vol 5, No 3, 205-211 High-Rise Buildings http://dx.doi.org/10.21022/IJHRB.2016.5.3.205 www.ctbuh-korea.org/ijhrb/index.php Key Technologies for Super Tall Building Construction: Lotte World Tower Gyu Dong Kim1,† and Joo Ho Lee2 1Engineering Division in Lotte World Tower, Seoul, Korea 2Research & Development Institute of Lotte Engineering and Construction, Seoul, Korea Abstract This paper addresses the key technologies for supertall building construction based on the Lotte World Tower project in Korea. First, the mega-mat foundation construction technologies are shown, including ultra-low heat concrete, heat of hydration control programs, and the logistics plan. Then, high strength concrete technologies of 50~80 MPa are introduced and discussed within the context of the highest pumping record in Korea at 514.25 meters. Structural design concepts of gravity load and lateral force resistance systems are introduced, along with surveying systems using GNSS and temporary installation plans of special heavy equipment like tower cranes, hoists, and high pressure concrete pumps. -

Appendix Contents
Appendix This appendix contains the textual transcripts of the fifty smartphone advertisements selected for the analysis. The smartphones are arranged in an alphabetical order and numbered in concord with the numbering of the advertisements used in the thesis. Contents Appendix .................................................................................................................................... 1 1 Acer Liquid Z220 commercial ......................................................................................... 4 2 Acer Liquid Z520 commercial ......................................................................................... 4 3 Alcatel Onetouch Idol 2 S commercial ............................................................................ 5 4 ALCATEL ONETOUCH PIXI 3 Family commercial ................................................... 6 5 ARCHOS Helium Plus commercial ................................................................................. 8 6 ASUS ZenFone 2 and ZenFone Zoom commercial ........................................................ 9 7 ASUS ZenFone Max commercial ................................................................................... 10 8 BlackBerry Classic commercial ..................................................................................... 12 9 BlackBerry PRIV commercial ....................................................................................... 13 10 BLU Life Pure Mini commercial ................................................................................ -

In the United States District Court for the Eastern District of Texas Marshall Division
Case 2:18-cv-00343-JRG Document 24 Filed 12/12/18 Page 1 of 32 PageID #: 142 IN THE UNITED STATES DISTRICT COURT FOR THE EASTERN DISTRICT OF TEXAS MARSHALL DIVISION EVS CODEC TECHNOLOGIES, LLC and § SAINT LAWRENCE COMMUNICATIONS, § LLC, § § Plaintiffs, Case No. 2:18-cv-00343-JRG § v. § § JURY TRIAL DEMANDED LG ELECTRONICS, INC., LG § ELECTRONICS U.S.A., INC., and LG ELECTRONICS MOBILECOMM U.S.A., § INC., § § Defendants. § § FIRST AMENDED COMPLAINT FOR PATENT INFRINGEMENT Case 2:18-cv-00343-JRG Document 24 Filed 12/12/18 Page 2 of 32 PageID #: 143 EVS Codec Technologies, LLC (“ECT”) and Saint Lawrence Communications, LLC (“SLC”) (collectively “Plaintiffs”) hereby submit this First Amended Complaint for patent infringement against Defendants LG Electronics, Inc. (“LGE”), LG Electronics U.S.A., Inc. (“LGUSA”), and LG Electronics Mobilecomm U.S.A., Inc. (“LGEM”) (collectively “LG” or “Defendants”) and state as follows: THE PARTIES 1. ECT is a Texas limited liability company with a principal place of business at 2323 S. Shepherd, 14th floor, Houston, Texas 77019-7024. 2. SLC is a Texas limited liability company, having a principal place of business at 6136 Frisco Square Blvd., Suite 400, Frisco, Texas 75034. 3. On information and belief, Defendant LGE is a Korean corporation with a principal place of business at LG Twin Towers, 128 Yeoui-daero, Yeongdungpo-gu, Seoul, 07366, South Korea. On information and belief, LGE is the entity that manufactures the LG-branded products sold in the United States, including the accused products in this case. On information and belief, in addition to making the products, LGE is responsible for research and development, product design, and sourcing of components. -

Tall Buildings and Megacities 321 212 Ppl/Sq
North America 541 m Africa Europe 442 m 87% 2,076 Tall Buildings in Numbers ppl/sq. km 69% 374 m 335 m 1,866 ppl/sq. km 306 m 85% 280 m 74% 245 m 633 1,005 1,161 222.5 m 231 m ppl/sq. km ppl/sq. km ppl/sq. km 100% 100% 563 63% 571 67% ppl/sq. km ppl/sq. km Tall Buildings and Megacities 321 212 ppl/sq. km ppl/sq. km 29% In this study, CTBUH undertook an examination of the populations, areas, densities, and several 31 13 6 9696 1 2 7 8198 19 Willis Tower Wilshire Grand Torre Reforma One World Trade Center Carlton Centre Tour First Metropol Tower Istanbul The Shard Federation Towers Vostok Tower measures of skyscraper activity in the world’s 45 “megacities” – defi ned as urban agglomerations Chicago - Milwaukee Los Angeles Mexico City New York-Philadelphia Johannesburg-Pretoria Courbevoie (Paris) Istanbul London Moscow with a total population of 10 million people or greater, consisting of a continuous built-up area that encompasses one or more city centers and suburban areas, economically and functionally linked to those centers. The fi ndings, also shown in the accompanying paper in this Journal: Megacities: Setting the Scene (page 30), are sometimes counterintuitive. While the world’s megacities have the 33,262 sq. km majority of 200 meter-plus skyscrapers, there is not an obvious correlation between population 24,132 density and number of skyscrapers. Vertical urbanism, it would seem, looks quite diff erent in local Moscow Shenyang sq. km 19,002,220 34,588 Tokyo contexts. -

Barometer of Mobile Internet Connections in Indonesia Publication of March 14Th 2018
Barometer of mobile Internet connections in Indonesia Publication of March 14th 2018 Year 2017 nPerf is a trademark owned by nPerf SAS, 87 rue de Sèze 69006 LYON – France. Contents 1 Methodology ................................................................................................................................. 2 1.1 The panel ............................................................................................................................... 2 1.2 Speed and latency tests ....................................................................................................... 2 1.2.1 Objectives and operation of the speed and latency tests ............................................ 2 1.2.2 nPerf servers .................................................................................................................. 2 1.3 Tests Quality of Service (QoS) .............................................................................................. 2 1.3.1 The browsing test .......................................................................................................... 2 1.3.2 YouTube streaming test ................................................................................................ 3 1.4 Filtering of test results .......................................................................................................... 3 1.4.1 Filtering of devices ........................................................................................................ 3 2 Overall results 2G/3G/4G ............................................................................................................ -
Case 5:18-Cv-06739-VKD Document 27 Filed 07/02/18 Page 1 of 11
Case 5:18-cv-06739-VKD Document 27 Filed 07/02/18 Page 1 of 11 IN THE UNITED STATES DISTRICT COURT FOR THE NORTHERN DISTRICT OF TEXAS DALLAS DIVISION § UNILOC USA, INC. and § UNILOC LUXEMBOURG, S.A., § Civil Action No. 3:18-cv-00560-DCG § Plaintiffs, § § v. § PATENT CASE § LG ELECTRONICS U.S.A., INC., § LG ELECTRONICS MOBILECOMM § U.S.A. INC. and § LG ELECTRONICS, INC., § § Defendant. § JURY TRIAL DEMANDED § FIRST AMENDED COMPLAINT FOR PATENT INFRINGEMENT Plaintiffs, Uniloc USA, Inc. (“Uniloc USA”) and Uniloc Luxembourg, S.A. (“Uniloc Luxembourg”) (together, “Uniloc”), for their First Amended Complaint against defendant, LG Electronics U.S.A. (“LGE”), Inc., LG Electronics Mobilecomm U.S.A., Inc., and LG Electronics, Inc., (“LG Korea”) (together “LG”), allege as follows:1 THE PARTIES 1. Uniloc USA is a Texas corporation having a principal place of business at Legacy Town Center I, Suite 380, 7160 Dallas Parkway, Plano Texas 75024. Uniloc USA also maintains a place of business at 102 N. College, Suite 603, Tyler, Texas 75702. 1 An amended complaint supersedes the original complaint and renders it of no legal effect, King v. Dogan, 31 F.3d 344. 346 (5th Cir. 1994), rendering a motion to dismiss the original complaint moot. See, e.g., Mangum v. United Parcel Services, No. 3:09-cv-0385, 2009 WL 2700217 (N.D. Tex. Aug. 26, 2009). 2988606.v1 Case 5:18-cv-06739-VKD Document 27 Filed 07/02/18 Page 2 of 11 2. Uniloc Luxembourg is a Luxembourg public limited liability company having a principal place of business at 15, Rue Edward Steichen, 4th Floor, L-2540, Luxembourg (R.C.S. -

LG V10 Specs
Capture the In-Between Moments The LG V10™ is a premium smartphone that offers everything you need to capture and share life’s moments, extreme durability for when the going gets rough, plus brilliant ingenuity for an exceptional mobile experience. 3.12" 0.34" Color: Space Black KEY FEATURES 16 MP Rear Camera Manual Mode for Still & Video Camera Steady Record Quick Video Editor & Snap Video Mode 5.7" 6.28" Quick Share IPS Quantum Display with Second Screen Fingerprint ID Weight: 6.77 oz. www.lg.com/us/V10-lra • SmartShare Beam – wirelessly transfer multimedia Design and Display Enhanced Convenience content from compatible LG devices via Wi-Fi Direct® • 5.7" IPS Quantum Display (513 ppi, 550 nit) • Smart Notice 2.0 – interprets a range of contextual inputs • Media Server – allow compatible nearby devices to • 0.2" Second Screen – provides quick access to notifications, and device usage patterns, and provides recommendations access your content via DLNA® that change with the user’s intent favorite apps, camera control features, and more • Miracast® – wirelessly mirror device screen on a • Stainless Steel Pillars and Thermoplastic Silicone* • Smart Bulletin 2.0 – view information and launch compatible display • Dura Guard Glass 2.0 – Gorilla Glass 3 inside and applications; includes customizable cards that provide tips, help users track their health,1 and more • Media Sync (MTP) – transfer files or synchronize with Gorilla Glass 4 outside Windows® Media Player3 • Ambidextrous Rear Key • Smart Settings – turn settings on/off, open apps, or change ™ 4 ® • Quick Charge 2.0 compatible • Fingerprint ID – hold finger on Power/Lock Key sensor to settings according to where you are, like having Wi-Fi turn on when you get home 1 4G LTE Network not available everywhere. -

Lotte World Tower South Korea
LOTTE WORLD TOWER Recently completed in 2017, Lotte World Tower is the tallest building in South Korea and the 5th tallest in the world. The slender, cone-shaped, tapered, aesthetically -designed skyscraper incorporates retail components, offices, a 7-star luxury hotel, and “Officetels”. Architecture & Design Features Sleek, tapered form with exterior light-toned silver glass Expansive variety of building functions Top 10 stories incorporate extensive public use and entertainment facilities Roof-top café and observation deck 10-story base includes as much size as the connected vertical tower Sustainability Recycled rainwater Solar PV panels Sun shading devices Wind Turbines Occupancy & Use Retail (Base-Podium) | Floors 1-12 Prime Office | Floors -14 38 Residences | Floors 42-71 Lotte Hotel | Floors 76-101 Private Offices | Floors 105-114 Observation Deck, Café, Lounge | Floors 117-123 Vertical Transportation World’s fastest elevators | 58 elevators PROJECT SUMMARY Project Description The most-recently completed mixed-use, mega-skyscraper, Lotte World Tower is the tallest building in South Korea & the fifth tallest in the world. The building boasts the world’s fastest elevator, highest swimming pool, and glass-bottomed observation deck. Official Building Name Lotte World Tower Other Building Names Lotte Jamsil Super Tower | Lotte World Premium Tower Location Seoul, South Korea Construction Commenced - 2011 | Completed - 2017 Occupancy Office | Residential | Hotel | Shopping Center | Observation Deck | Officetels LEED Rating -

Electronic 3D Models Catalogue (On July 26, 2019)
Electronic 3D models Catalogue (on July 26, 2019) Acer 001 Acer Iconia Tab A510 002 Acer Liquid Z5 003 Acer Liquid S2 Red 004 Acer Liquid S2 Black 005 Acer Iconia Tab A3 White 006 Acer Iconia Tab A1-810 White 007 Acer Iconia W4 008 Acer Liquid E3 Black 009 Acer Liquid E3 Silver 010 Acer Iconia B1-720 Iron Gray 011 Acer Iconia B1-720 Red 012 Acer Iconia B1-720 White 013 Acer Liquid Z3 Rock Black 014 Acer Liquid Z3 Classic White 015 Acer Iconia One 7 B1-730 Black 016 Acer Iconia One 7 B1-730 Red 017 Acer Iconia One 7 B1-730 Yellow 018 Acer Iconia One 7 B1-730 Green 019 Acer Iconia One 7 B1-730 Pink 020 Acer Iconia One 7 B1-730 Orange 021 Acer Iconia One 7 B1-730 Purple 022 Acer Iconia One 7 B1-730 White 023 Acer Iconia One 7 B1-730 Blue 024 Acer Iconia One 7 B1-730 Cyan 025 Acer Aspire Switch 10 026 Acer Iconia Tab A1-810 Red 027 Acer Iconia Tab A1-810 Black 028 Acer Iconia A1-830 White 029 Acer Liquid Z4 White 030 Acer Liquid Z4 Black 031 Acer Liquid Z200 Essential White 032 Acer Liquid Z200 Titanium Black 033 Acer Liquid Z200 Fragrant Pink 034 Acer Liquid Z200 Sky Blue 035 Acer Liquid Z200 Sunshine Yellow 036 Acer Liquid Jade Black 037 Acer Liquid Jade Green 038 Acer Liquid Jade White 039 Acer Liquid Z500 Sandy Silver 040 Acer Liquid Z500 Aquamarine Green 041 Acer Liquid Z500 Titanium Black 042 Acer Iconia Tab 7 (A1-713) 043 Acer Iconia Tab 7 (A1-713HD) 044 Acer Liquid E700 Burgundy Red 045 Acer Liquid E700 Titan Black 046 Acer Iconia Tab 8 047 Acer Liquid X1 Graphite Black 048 Acer Liquid X1 Wine Red 049 Acer Iconia Tab 8 W 050 Acer -

Vertical Transportation: Ascent & Acceleration
Tall Buildings in Numbers Vertical Transportation: Ascent & Acceleration As part of a recent collaboration with the Guinness Book of World Records, CTBUH certified that Shanghai Tower has the fastest elevator and the longest elevator run of all commercial buildings in the world. Expanding upon this study, CTBUH sought to determine the records for speed and length of run among the world’s tall buildings. The findings and related data are displayed here. The World’s Five Fastest Elevator Installations* Key 615 m 600 m Length of Elevator Run Distance Traveled = = (may include fl oors 504.9 m in 30 seconds below ground) 375 m 318 m 20.5 m/s 20.0 m/s 16.83 m/s 12.5 m/s 10.6 m/s Shanghai Tower CTF Finance Center Taipei 101 Landmark Tower Two International Shanghai, 632 m Guangzhou, 530 m Taipei, 508 m Yokohama, 296 m Finance Center Hong Kong, 412 m *The speeds shown are maximum vertical speed achieved during the run. Elevators do not maintain a constant speed during the ascent, as they accelerate and brake at the beginning and end of each trip, respectively. The World’s Five Tallest Continuous Elevator Runs 578.55 m 573.5 m 516.7 m 504.0 m 496.0 m Shanghai Tower Ping An Finance Centre CTF Finance Center Burj Khalifa Lotte World Tower Shanghai, 632 m Shenzhen, 599 m Guangzhou, 530 m Dubai, 830 m Seoul, 555 m The glass-sided Bailong The 601-meter Makkah Royal Aufzugstestturm in Rottweill, Elevator in China is the world’s Clock Tower in Mecca, Saudi Germany tests elevators for tallest outdoor elevator at Arabia, the world’s current third- thyssenkrupp and features the 326 meters. -

LG V10 User Guide
MFL69468201(1.0) ME MFL69468201(1.0) Guía del usuario. User guide. User User guide. User This booklet is made from 98% post-consumer recycled paper. This booklet is printed with soy ink. Printed in Mexico Copyright©2016 LG Electronics, Inc. All rights reserved. LG and the LG logo are registered trademarks of LG Corp. V10 is a trademark of LG Electronics, Inc. All other trademarks are the property of their respective owners. Important Customer Information 1 Before you begin using your new phone Included in the box with your phone are separate information leaflets. These leaflets provide you with important information regarding your new device. Please read all of the information provided. This information will help you to get the most out of your phone, reduce the risk of injury, avoid damage to your device, and make you aware of legal regulations regarding the use of this device. It’s important to review the Product Safety and Warranty Information guide before you begin using your new phone. Please follow all of the product safety and operating instructions and retain them for future reference. Observe all warnings to reduce the risk of injury, damage, and legal liabilities. 2 Table of Contents Important Customer Information...............................................1 Table of Contents .......................................................................2 The Basics ...................................................................................5 Phone Overview ................................................................................................... -
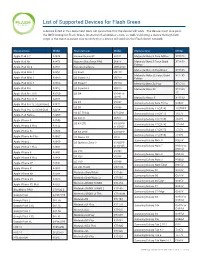
List of Supported Devices for Flash Green
List of Supported Devices for Flash Green A device listed in this document does not guarantee that the device will work. The device must also pass the IMEI lookup for Flash Green, located on flashwireless.com, as well. Validating a device through both steps is the most accurate way to verify that a device will work on the Flash Green network. Manufacturer Model Manufacturer Model Manufacturer Model Apple iPad 9.7 A1674 Huawei Nexus 6P H1511 Motorola Moto X Pure Edition XT1575 Apple iPad Air A1475 Kyocera DuraForce PRO E6810 Motorola Moto Z Force Droid XT1650 Edition Apple iPad Air 2 A1567 Kyocera Cadence LTES2720 Motorola Moto Z Play Droid XT1635 Apple iPad Mini 2 A1491 LG Exalt VN220 Motorola Moto Z2 Force Droid XT1789 Apple iPad Mini 3 A1600 LG G pad 10.1 VK700 Edition Apple iPad Mini 4 A1550 LG G pad 7 VK410 Motorola Moto Z2 Play XT1710 Apple iPad Pro A1652 LG G pad 8.3 VK810 Motorola Moto Z3 XT1929- Apple iPad Pro 10.5 A1709 LG G4 VS986 or 17 US991 Apple iPad Pro 11.0 A2013 Motorola Nexus 6 XT1103 LG G5 VS987 Apple iPad Pro 12.9 (2nd Gen) A1671 Samsung Galaxy Core Prime G360V LG G6 VS998 Apple iPad Pro 12.9 (3rd Gen) A2014 Samsung Galaxy J3 (2016) J320VPP LG G7 ThinQ G710VM Apple iPad Retina A1460 Samsung Galaxy J3 (2017) J327V LG K20 V VS501 Apple iPhone 6 A1549 Samsung Galaxy J3 (2018) J337V LG K4 LTE VS425PP Samsung Galaxy J7 (2016) J700M Apple iPhone 6 Plus A1522 or VS425 Samsung Galaxy J7 (2017) J727V Apple iPhone 6s A1688 LG K8 2018 X210VPP Samsung Galaxy J7 (2018) J737V Apple iPhone 6s Plus A1687 LG Nexus 5X H790 Samsung Galaxy