Appendix 2 Waves and Wave Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Music Synthesis
MUSIC SYNTHESIS Sound synthesis is the art of using electronic devices to create & modify signals that are then turned into sound waves by a speaker. Making Waves: WGRL - 2015 Oscillators An oscillator generates a consistent, repeating signal. Signals from oscillators and other sources are used to control the movement of the cones in our speakers, which make real sound waves which travel to our ears. An oscillator wiggles an audio signal. DEMONSTRATE: If you tie one end of a rope to a doorknob, stand back a few feet, and wiggle the other end of the rope up and down really fast, you're doing roughly the same thing as an oscillator. REVIEW: Frequency and pitch Frequency, measured in cycles/second AKA Hertz, is the rate at which a sound wave moves in and out. The length of a signal cycle of a waveform is the span of time it takes for that waveform to repeat. People generally hear an increase in the frequency of a sound wave as an increase in pitch. F DEMONSTRATE: an oscillator generating a signal that repeats at the rate of 440 cycles per second will have the same pitch as middle A on a piano. An oscillator generating a signal that repeats at 880 cycles per second will have the same pitch as the A an octave above middle A. Types of Waveforms: SINE The SINE wave is the most basic, pure waveform. These simple waves have only one frequency. Any other waveform can be created by adding up a series of sine waves. In this picture, the first two sine waves In this picture, a sine wave is added to its are added together to produce a third. -
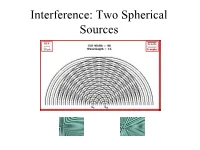
Interference: Two Spherical Sources Superposition
Interference: Two Spherical Sources Superposition Interference Waves ADD: Constructive Interference. Waves SUBTRACT: Destructive Interference. In Phase Out of Phase Superposition Traveling waves move through each other, interfere, and keep on moving! Pulsed Interference Superposition Waves ADD in space. Any complex wave can be built from simple sine waves. Simply add them point by point. Simple Sine Wave Simple Sine Wave Complex Wave Fourier Synthesis of a Square Wave Any periodic function can be represented as a series of sine and cosine terms in a Fourier series: y() t ( An sin2ƒ n t B n cos2ƒ) n t n Superposition of Sinusoidal Waves • Case 1: Identical, same direction, with phase difference (Interference) Both 1-D and 2-D waves. • Case 2: Identical, opposite direction (standing waves) • Case 3: Slightly different frequencies (Beats) Superposition of Sinusoidal Waves • Assume two waves are traveling in the same direction, with the same frequency, wavelength and amplitude • The waves differ in phase • y1 = A sin (kx - wt) • y2 = A sin (kx - wt + f) • y = y1+y2 = 2A cos (f/2) sin (kx - wt + f/2) Resultant Amplitude Depends on phase: Spatial Interference Term Sinusoidal Waves with Constructive Interference y = y1+y2 = 2A cos (f/2) sin (kx - wt + f /2) • When f = 0, then cos (f/2) = 1 • The amplitude of the resultant wave is 2A – The crests of one wave coincide with the crests of the other wave • The waves are everywhere in phase • The waves interfere constructively Sinusoidal Waves with Destructive Interference y = y1+y2 = 2A cos (f/2) -

Chapter 1 Waves in Two and Three Dimensions
Chapter 1 Waves in Two and Three Dimensions In this chapter we extend the ideas of the previous chapter to the case of waves in more than one dimension. The extension of the sine wave to higher dimensions is the plane wave. Wave packets in two and three dimensions arise when plane waves moving in different directions are superimposed. Diffraction results from the disruption of a wave which is impingent upon an object. Those parts of the wave front hitting the object are scattered, modified, or destroyed. The resulting diffraction pattern comes from the subsequent interference of the various pieces of the modified wave. A knowl- edge of diffraction is necessary to understand the behavior and limitations of optical instruments such as telescopes. Diffraction and interference in two and three dimensions can be manipu- lated to produce useful devices such as the diffraction grating. 1.1 Math Tutorial — Vectors Before we can proceed further we need to explore the idea of a vector. A vector is a quantity which expresses both magnitude and direction. Graph- ically we represent a vector as an arrow. In typeset notation a vector is represented by a boldface character, while in handwriting an arrow is drawn over the character representing the vector. Figure 1.1 shows some examples of displacement vectors, i. e., vectors which represent the displacement of one object from another, and introduces 1 CHAPTER 1. WAVES IN TWO AND THREE DIMENSIONS 2 y Paul B y B C C y George A A y Mary x A x B x C x Figure 1.1: Displacement vectors in a plane. -
Tektronix Signal Generator
Signal Generator Fundamentals Signal Generator Fundamentals Table of Contents The Complete Measurement System · · · · · · · · · · · · · · · 5 Complex Waves · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 The Signal Generator · · · · · · · · · · · · · · · · · · · · · · · · · · · · 6 Signal Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Analog or Digital? · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 7 Analog Modulation · · · · · · · · · · · · · · · · · · · · · · · · · 15 Basic Signal Generator Applications· · · · · · · · · · · · · · · · 8 Digital Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Verification · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Frequency Sweep · · · · · · · · · · · · · · · · · · · · · · · · · · · 16 Testing Digital Modulator Transmitters and Receivers · · 8 Quadrature Modulation · · · · · · · · · · · · · · · · · · · · · 16 Characterization · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Digital Patterns and Formats · · · · · · · · · · · · · · · · · · · 16 Testing D/A and A/D Converters · · · · · · · · · · · · · · · · · 8 Bit Streams · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 17 Stress/Margin Testing · · · · · · · · · · · · · · · · · · · · · · · · · · · 9 Types of Signal Generators · · · · · · · · · · · · · · · · · · · · · · 17 Stressing Communication Receivers · · · · · · · · · · · · · · 9 Analog and Mixed Signal Generators · · · · · · · · · · · · · · 18 Signal Generation Techniques -

Fourier Analysis
FOURIER ANALYSIS Lucas Illing 2008 Contents 1 Fourier Series 2 1.1 General Introduction . 2 1.2 Discontinuous Functions . 5 1.3 Complex Fourier Series . 7 2 Fourier Transform 8 2.1 Definition . 8 2.2 The issue of convention . 11 2.3 Convolution Theorem . 12 2.4 Spectral Leakage . 13 3 Discrete Time 17 3.1 Discrete Time Fourier Transform . 17 3.2 Discrete Fourier Transform (and FFT) . 19 4 Executive Summary 20 1 1. Fourier Series 1 Fourier Series 1.1 General Introduction Consider a function f(τ) that is periodic with period T . f(τ + T ) = f(τ) (1) We may always rescale τ to make the function 2π periodic. To do so, define 2π a new independent variable t = T τ, so that f(t + 2π) = f(t) (2) So let us consider the set of all sufficiently nice functions f(t) of a real variable t that are periodic, with period 2π. Since the function is periodic we only need to consider its behavior on one interval of length 2π, e.g. on the interval (−π; π). The idea is to decompose any such function f(t) into an infinite sum, or series, of simpler functions. Following Joseph Fourier (1768-1830) consider the infinite sum of sine and cosine functions 1 a0 X f(t) = + [a cos(nt) + b sin(nt)] (3) 2 n n n=1 where the constant coefficients an and bn are called the Fourier coefficients of f. The first question one would like to answer is how to find those coefficients. -

Accurate Sine-Wave Frequency Estimation by Means of an Interpolated DTFT Algorithm
21st IMEKO TC4 International Symposium and 19th International Workshop on ADC Modelling and Testing Understanding the World through Electrical and Electronic Measurement Budapest, Hungary, September 7-9, 2016 Accurate sine-wave frequency estimation by means of an interpolated DTFT algorithm Daniel Belega1, Dario Petri2, Dominique Dallet3 1Department of Measurements and Optical Electronics, University Politehnica Timisoara, Bv. V. Parvan, Nr. 2, 300223, Timisoara, Romania, email: [email protected] 2Department of Industrial Engineering, University of Trento, Via Sommarive, 9, 38123, Trento, Italy, email: [email protected] 3IMS Laboratory, Bordeaux IPB, University of Bordeaux, CNRS UMR5218,351 Cours de la Libération, Bâtiment A31, 33405, Talence Cedex, France, email: [email protected] Abstract – An Interpolated Discrete Time Fourier IpDFT methods have been proposed to reduce this detrimental Transform (IpDTFT) algorithm for sine-wave effect [10]-[13]. However, when the number of acquired frequency estimation is proposed in this paper. It sine-wave cycles is very small the achieved estimation generalizes the classical interpolated Discrete Fourier accuracy is quite low. Transform (IpDFT) algorithm by interpolating two In this paper a new Interpolated Discrete Time Fourier DTFT spectrum samples located one frequency bin Transform (IpDTFT) algorithm is proposed. It generalizes apart. The influence on the estimated frequency of the the classical IpDFT approach by interpolating two suitably spectral image component is investigated in the case selected DTFT spectrum samples located one bin apart. The when the acquired sine-wave samples are weighted by degree of freedom in the selection of the spectrum samples a Maximum Sidelobe Decay (MSD) window. An allows to minimize the contribution of the spectral image analytical expression for the estimation error due to component on the estimated frequency. -

Characteristics of Sine Wave Ac Power
CHARACTERISTICS OF BY: VIJAY SHARMA SINE WAVE AC POWER: ENGINEER DEFINITIONS OF ELECTRICAL CONCEPTS, specifications & operations Excerpt from Inverter Charger Series Manual CHARACTERISTICS OF SINE WAVE AC POWER 1.0 DEFINITIONS OF ELECTRICAL CONCEPTS, SPECIFICATIONS & OPERATIONS Polar Coordinate System: It is a two-dimensional coordinate system for graphical representation in which each point on a plane is determined by the radial coordinate and the angular coordinate. The radial coordinate denotes the point’s distance from a central point known as the pole. The angular coordinate (usually denoted by Ø or O t) denotes the positive or anti-clockwise (counter-clockwise) angle required to reach the point from the polar axis. Vector: It is a varying mathematical quantity that has a magnitude and direction. The voltage and current in a sinusoidal AC voltage can be represented by the voltage and current vectors in a Polar Coordinate System of graphical representation. Phase, Ø: It is denoted by"Ø" and is equal to the angular magnitude in a Polar Coordinate System of graphical representation of vectorial quantities. It is used to denote the angular distance between the voltage and the current vectors in a sinusoidal voltage. Power Factor, (PF): It is denoted by “PF” and is equal to the Cosine function of the Phase "Ø" (denoted CosØ) between the voltage and current vectors in a sinusoidal voltage. It is also equal to the ratio of the Active Power (P) in Watts to the Apparent Power (S) in VA. The maximum value is 1. Normally it ranges from 0.6 to 0.8. Voltage (V), Volts: It is denoted by “V” and the unit is “Volts” – denoted as “V”. -

Evolution of Unidirectional Random Waves in Shallow Water
Evolution of unidirectional random waves in shallow water (the Korteweg - de Vries model) Anna Kokorina1,2) and Efim Pelinovsky1,3) 1)Laboratory of Hydrophysics and Nonlinear Acoustics, Institute of Applied Physics, Nizhny Novgorod, Russia; email: [email protected] 2)Applied Mathematics Department, Nizhny Novgorod State Technical University, Nizhny Novgorod, Russia 3)IRPHE – Technopole de Chateau-Gombert, Marseille, France Abstract: Numerical simulations of the unidirectional random waves are performed within the Korteweg -de Vries equation to investigate the statistical properties of surface gravity waves in shallow water. Nonlinear evolution shows the relaxation of the initial state to the quasi-stationary state differs from the Gaussian distribution. Significant nonlinear effects lead to the asymmetry in the wave field with bigger crests amplitudes and increasing of large wave contribution to the total distribution, what gives the rise of the amplitude probability, exceeded the Rayleigh distribution. The spectrum shifts in low frequencies with the almost uniform distribution. The obtained results of the nonlinear evolution of shallow-water waves are compared with known properties of deep-water waves in the framework of the nonlinear Schrodinger equation. I. INTRODUCTION Due to the dispersion of the surface water waves, each individual sine wave travels with a frequency dependent velocity, and they propagate along different directions. Due to the nonlinearity of the water waves, sine waves interact with each other generating new spectral components. As a result, the wave field gives rise to an irregular sea surface that is constantly changing with time. To explain the statistical characteristics of the random wave field, various physical models are used. -

Basic Audio Terminology
Audio Terminology Basics © 2012 Bosch Security Systems Table of Contents Introduction 3 A-I 5 J-R 10 S-Z 13 Wrap-up 15 © 2012 Bosch Security Systems 2 Introduction Audio Terminology Are you getting ready to buy a new amp? Is your band booking some bigger venues and in need of new loudspeakers? Are you just starting out and have no idea what equipment you need? As you look up equipment details, a lot of the terminology can be pretty confusing. What do all those specs mean? What’s a compression driver? Is it different from a loudspeaker? Why is a 4 watt amp cheaper than an 8 watt amp? What’s a balanced interface, and why does it matter? We’re Here to Help When you’re searching for the right audio equipment, you don’t need to know everything about audio engineering. You just need to understand the terms that matter to you. This quick-reference guide explains some basic audio terms and why they matter. © 2012 Bosch Security Systems 3 What makes EV the expert? Experience. Dedication. Passion. Electro-Voice has been in the audio equipment business since 1930. Recognized the world over as a leader in audio technology, EV is ubiquitous in performing arts centers, sports facilities, houses of worship, cinemas, dance clubs, transportation centers, theaters, and, of course, live music. EV’s reputation for providing superior audio products and dedication to innovation continues today. Whether EV microphones, loudspeaker systems, amplifiers, signal processors, the EV solution is always a step up in performance and reliability. -

EE301 – INTRO to AC and SINUSOIDS Learning Objectives
EE301 – INTRO TO AC AND SINUSOIDS Learning Objectives a. Compare AC and DC voltage and current sources as defined by voltage polarity, current direction and magnitude over time b. Define the basic sinusoidal wave equations and waveforms, and determine amplitude, peak to peak values, phase, period, frequency, and angular velocity c. Determine the instantaneous value of a sinusoidal waveform d. Graph sinusoidal wave equations as a function of time and angular velocity using degrees and radians e. Define effective / root mean squared values f. Define phase shift and determine phase differences between same frequency waveforms Alternating Current (AC) With the exception of short-term capacitor and inductor transients, all voltages and currents we have seen up to this point have been “DC”—i.e., fixed in magnitude. Now we shift our focus to “AC” voltage and current sources. AC sources (usually represented by lowercase e(t) or i(t)) have a sinusoidal waveform. For an AC voltage, for example, the voltage polarity changes every cycle. On the other hand, for an AC current, the current changes direction each cycle with the source voltage. Voltage and Current Conventions When e has a positive value, its actual polarity is the same as the reference polarity. When i has a positive value, its actual direction is the same as the reference arrow. 1 9/14/2016 EE301 – INTRO TO AC AND SINUSOIDS Sinusoids Since our ac waveforms (voltages and currents) are sinusoidal, we need to have a ready familiarity with the equation for a sinusoid. The horizontal scale, referred to as the “time scale” can represent degrees or time. -

Oscilloscope Fundamentals 03W-8605-4 Edu.Qxd 3/31/09 1:55 PM Page 2
03W-8605-4_edu.qxd 3/31/09 1:55 PM Page 1 Oscilloscope Fundamentals 03W-8605-4_edu.qxd 3/31/09 1:55 PM Page 2 Oscilloscope Fundamentals Table of Contents The Systems and Controls of an Oscilloscope .18 - 31 Vertical System and Controls . 19 Introduction . 4 Position and Volts per Division . 19 Signal Integrity . 5 - 6 Input Coupling . 19 Bandwidth Limit . 19 The Significance of Signal Integrity . 5 Bandwidth Enhancement . 20 Why is Signal Integrity a Problem? . 5 Horizontal System and Controls . 20 Viewing the Analog Orgins of Digital Signals . 6 Acquisition Controls . 20 The Oscilloscope . 7 - 11 Acquisition Modes . 20 Types of Acquisition Modes . 21 Understanding Waveforms & Waveform Measurements . .7 Starting and Stopping the Acquisition System . 21 Types of Waves . 8 Sampling . 22 Sine Waves . 9 Sampling Controls . 22 Square and Rectangular Waves . 9 Sampling Methods . 22 Sawtooth and Triangle Waves . 9 Real-time Sampling . 22 Step and Pulse Shapes . 9 Equivalent-time Sampling . 24 Periodic and Non-periodic Signals . 10 Position and Seconds per Division . 26 Synchronous and Asynchronous Signals . 10 Time Base Selections . 26 Complex Waves . 10 Zoom . 26 Eye Patterns . 10 XY Mode . 26 Constellation Diagrams . 11 Z Axis . 26 Waveform Measurements . .11 XYZ Mode . 26 Frequency and Period . .11 Trigger System and Controls . 27 Voltage . 11 Trigger Position . 28 Amplitude . 12 Trigger Level and Slope . 28 Phase . 12 Trigger Sources . 28 Waveform Measurements with Digital Oscilloscopes 12 Trigger Modes . 29 Trigger Coupling . 30 Types of Oscilloscopes . .13 - 17 Digital Oscilloscopes . 13 Trigger Holdoff . 30 Digital Storage Oscilloscopes . 14 Display System and Controls . 30 Digital Phosphor Oscilloscopes . -

DATA COMMUNICATION and NETWORKING Software Department – Fourth Class
DATA COMMUNICATION AND NETWORKING Software Department – Fourth Class Data Transmission I Dr. Raaid Alubady - Lecture 5 Introduction Part Two for this subject is deal with the transfer of data between two devices that are directly connected; that is, the two devices are linked by a single transmission path rather than a network. Even this simple context introduces numerous technical and design issues. We need to understand something about the process of transmitting signals across a communications link. Both analog and digital transmission techniques are used. In both cases, the signal can be described as consisting of a spectrum of components across a range of electromagnetic frequencies. Data, Signals and Transmission One of the major functions of the physical layer is to move data in the form of electromagnetic signals across a transmission medium. Whether you are collecting numerical statistics from another computer, sending animated pictures from a design workstation, or causing a bell to ring at a distant control center, you are working with the transmission of data across network connections. Generally, the data usable to a person or application are not in a form that can be transmitted over a network. For example, a photograph must first be changed to a form that transmission media can accept. Transmission media work by conducting energy along a physical path. There are three contexts in communication system: data, signaling, and transmission. Briefly, these contexts define as: Data is entities that convey meaning, or information. Signals are electric or electromagnetic representations of data. Signaling is the physical propagation of the signal along a suitable medium.