Smartphone Video Guidance Sensor for Small Satellites
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2014 BT Compatibility List 20141030
Item Brand Name Model 1 Acer Acer beTouch E210 2 Acer acer E400 3 Acer acer P400 4 Acer DX650 5 Acer E200 6 Acer Liquid E 7 Acer Liquid Mini (E310) 8 Acer M900 9 Acer S110 10 Acer Smart handheld 11 Acer Smart handheld 12 Acer Smart handheld E100 13 Acer Smart handheld E101 14 Adec & Partner AG AG vegas 15 Alcatel Alcatel OneTouch Fierce 2 16 Alcatel MISS SIXTY MSX10 17 Alcatel OT-800/ OT-800A 18 Alcatel OT-802/ OT-802A 19 Alcatel OT-806/ OT-806A/ OT-806D/ OT-807/ OT-807A/ OT-807D 20 Alcatel OT-808/ OT-808A 21 Alcatel OT-880/ OT-880A 22 Alcatel OT-980/ OT-980A 23 Altek Altek A14 24 Amazon Amazon Fire Phone 25 Amgoo Telecom Co LTD AM83 26 Apple Apple iPhone 4S 27 Apple Apple iPhone 5 28 Apple Apple iPhone 6 29 Apple Apple iPhone 6 Plus 30 Apple iPhone 2G 31 Apple iPhone 3G 32 Apple iPhone 3Gs 33 Apple iPhone 4 34 Apple iPhone 5C 35 Apple iPHone 5S 36 Aramasmobile.com ZX021 37 Ascom Sweden AB 3749 38 Asustek 1000846 39 Asustek A10 40 Asustek G60 41 Asustek Galaxy3_L and Galaxy3_S 42 Asustek Garmin-ASUS M10E 43 Asustek P320 44 Asustek P565c 45 BlackBerry BlackBerry Passport 46 BlackBerry BlackBerry Q10 47 Broadcom Corporation BTL-A 48 Casio Hitachi C721 49 Cellnet 7 Inc. DG-805 Cellon Communications 50 C2052, Technology(Shenzhen) Co., Ltd. Cellon Communications 51 C2053, Technology(Shenzhen) Co., Ltd. Cellon Communications 52 C3031 Technology(Shenzhen) Co., Ltd. Cellon Communications 53 C5030, Technology(Shenzhen) Co., Ltd. -

Good for Enterprise – Android V1.9.1 Release Notes (Service Release)
Good for Enterprise – Android v1.9.1 Release Notes (Service Release) Updated: April 27, 2012 Good for Enterprise – Android v1.9.1 (Service Release) .............................................................................................. 1 Issues Resolved ........................................................................................................................................................ 1 Good for Enterprise – Android v1.9.0 ........................................................................................................................... 1 New Features ............................................................................................................................................................ 1 Issues Resolved ........................................................................................................................................................ 2 Good for Enterprise – Android v1.8.1 (Service Release) .............................................................................................. 2 Good for Enterprise – Android v1.8.0 ........................................................................................................................... 3 New Features ............................................................................................................................................................ 3 Good for Enterprise – Android v1.7.5 Service Release ................................................................................................ 3 -

MMS Copy of Supported Devices
Good For Enterprise ‐ Certified Devices Country Network Platform Device All All Android Asus Eee Pad Transformer Prime All All Android Cisco Cius All All Android Google Nexus One All All Android HTC Desire (globally unlocked) All All Android HTC Legend (globally unlocked) All All Android HTC One (Google Play Edition) All All Android Kindle Fire All All Android LG Optimus 2X (globally unlocked) All All Android Moto G (Global unlocked) All All Android Moto G (US unlocked) All All Android Motorola Milestone (globally unlocked) All All Android Motorola Milestone 2 (globally unlocked) All All Android Motorola Xoom 2 WiFi All All Android Motorola Xoom WiFi All All Android Nexus 10 All All Android Nexus 4 All All Android Nexus 5 All All Android Nexus 7 (2012, 2013, WiFi only) All All Android Samsung Galaxy Nexus (globally unlocked) All All Android Samsung Galaxy Note 8 (WiFi only) All All Android Samsung Galaxy Note 10.1 (Intl. WiFi only) All All Android Samsung Galaxy Note 10.1 (U.S WiFi only) All All Android Samsung Galaxy Note 10.1 (2014) (WiFi only) All All Android Samsung Galaxy S II All All Android Samsung Galaxy S III (globally unlocked) All All Android Samsung Galaxy S III mini All All Android Samsung Galaxy S4 (Google Play Edition) All All Android Samsung Galaxy S4 (GT‐I9500) All All Android Samsung Galaxy S4 (GT‐I9505) All All Android Samsung Galaxy Tab 2 7 (WiFi only) All All Android Samsung Galaxy Tab 3 (7‐inch) All All Android Samsung Galaxy Tab 3 (8‐inch) All All Android Samsung Galaxy Tab 10.1 (WiFi only) All All Android Samsung -
Udynamo Compatibility List
uDynamo Compatibility List Reader Manuf. Device Name Alt. Model Info Model Info OS OS Version Carrier Date Added Date Tested Type iDynamo 5 Apple iPad Air 2 Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPad Air* Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPad with Retina Display* Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPad mini 3 Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPad mini 2 Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPad mini* Lightning N/A iOS N/A N/A Tablet iDynamo 5 Apple iPhone 5c* Lightning N/A iOS N/A N/A Phone iDynamo 5 Apple iPhone 5s* Lightning N/A iOS N/A N/A Phone iDynamo 5 Apple iPhone 5* Lightning N/A iOS N/A N/A Phone iDynamo 5 Apple iPod touch (5th* generation) Lightning N/A iOS N/A N/A iPod iDynamo 5 Apple iPhone 6* Lightning N/A iOS N/A N/A Phone iDynamo 5 Apple iPhone 6 Plus* Lightning N/A iOS N/A N/A Phone iDynamo Apple iPad (3rd generation) 30 PIN N/A iOS N/A N/A Tablet iDynamo Apple iPad 2 30 PIN N/A iOS N/A N/A Tablet iDynamo Apple iPad 30 PIN N/A iOS N/A N/A Tablet iDynamo Apple iPhone 4s 30 PIN N/A iOS N/A N/A Phone iDynamo Apple iPhone 4 30 PIN N/A iOS N/A N/A Phone iDynamo Apple iPhone 3GS 30 PIN N/A iOS N/A N/A Phone iDynamo Apple iPod touch (3rd and 4th generation) 30 PIN N/A iOS N/A N/A iPod uDynamo Acer liquid MT liquid MT Android 2.3.6 101.18 1/24/14 1/24/14 uDynamo Alcatel Alcatel OneTouch Fierce 7024W Android 4.2.2 101.18 3/6/14 3/6/14 uDynamo ALCATEL Megane ALCATEL ONE TOUCH 5020T Android 4.1.2 101.18 8/10/15 8/10/15 uDynamo ALCATEL ALCATEL ONE TOUCH IDOL X ALCATEL -

Your HTC Amaze 4G User Guide 2 Contents Contents
Your HTC Amaze 4G User guide 2 Contents Contents Getting started HTC Amaze 4G 8 Back cover 10 SIM card 12 Storage card 13 Battery 14 Getting the battery to last longer 15 Switching the power on or off 16 Setting up HTC Amaze 4G for the first time 16 Finger gestures 16 Ways of getting contacts into HTC Amaze 4G 17 Home screen 18 Basics Adjusting the volume 19 Sleep mode 19 Status icons 21 Notifications 22 Switching between recently opened apps 24 Using Quick Settings 24 Where apps, data, and files are stored 25 Connecting your phone to a computer 26 Copying files to or from the phone storage or storage card 26 Copying and sharing text 27 Printing 28 Personalizing Making HTC Amaze 4G truly yours 29 Personalizing HTC Amaze 4G with scenes 29 Changing your wallpaper 30 Applying a new skin 31 Personalizing your Home screen with widgets 31 Adding apps and other shortcuts on your Home screen 32 Rearranging or removing widgets and icons on your Home screen 33 Personalizing the launch bar 33 Grouping apps into a folder 34 Rearranging the Home screen 35 Personalizing with sound sets 36 Rearranging application tabs 37 Customizing the lock screen style 37 3 Contents Phone calls Making a call with Smart dial 39 Using Speed dial 39 Calling a phone number in a text message 40 Calling a phone number in an email 40 Calling a phone number in a Calendar event 40 Making an emergency call 40 Receiving calls 40 What can I do during a call? 41 Setting up a conference call 43 Wi-Fi Calling 43 Internet calls 44 Call history 45 Home dialing 46 Call services 47 Turning -
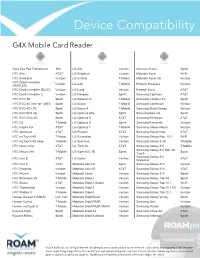
Device Compaibility List
Device Compatibility G4X Mobile Card Reader Asus Eee Pad Transformer N/A LG Ally Verizon Motorola Photon Sprint HTC Aria AT&T LG Enlighten Verizon Motorola Xoom Wi-Fi HTC Droid Eris Verizon LG G-Slate T-Mobile Motorola Xoom 4G Verizon HTC Droid Incredible Verizon LG G2X T-Mobile Pantech Breakout Verizon (AMOLED) HTC Droid Incredible (SLCD) Verizon LG Lucid Verizon Pantech Burst AT&T HTC Droid Incredible 2 Verizon LG Marquee Sprint Samsung Captivate AT&T HTC EVO 3D Sprint LG Mytouch Q T-Mobile Samsung Conquer 4G Sprint HTC EVO 4G (h/w ver. 0003) Sprint LG Nexus T-Mobile Samsung Continuum Verizon HTC EVO 4G LTE Sprint LG Nexus 4 T-Mobile Samsung Droid Charge Verizon HTC EVO Shift 4G Sprint LG Optimus Elite Sprint Samsung Epic 4G Sprint HTC EVO View 4G Sprint LG Optimus G AT&T Samsung Exhilarate AT&T HTC G2 T-Mobile LG Optimus S Sprint Samsung Fascinate Verizon HTC Inspire 4G AT&T LG Optimus T T-Mobile Samsung Galaxy Nexus Verizon HTC Jetstream AT&T LG Phoenix AT&T Samsung Galaxy Note AT&T HTC myTouch 4G T-Mobile LG Revolution Verizon Samsung Galaxy Note 10.1 Wi-Fi HTC myTouch 4G Slide T-Mobile LG Spectrum Verizon Samsung Galaxy S 4G T-Mobile HTC Nexus One AT&T LG Thrill 4G AT&T Samsung Galaxy S II T-Mobile Samsung Galaxy S II Epic 4G HTC Nexus One T-Mobile LG Viper 4G LTE Sprint Sprint Touch Samsung Galaxy S II HTC One S AT&T LG Vortex Verizon AT&T Skyrocket HTC One X AT&T Motorola Admiral Sprint Samsung Galaxy S III Verizon HTC Rezound Verizon Motorola Atrix 4G AT&T Samsung Galaxy S III AT&T HTC Rhyme Verizon Motorola Citrus Verizon Samsung Galaxy S III Sprint HTC Sensation 4G T-Mobile Motorola Droid 2 Verizon Samsung Galaxy Tab 3G Sprint HTC Status AT&T Motorola Droid 2 Global Verizon Samsung Galaxy Tab 10.1 Wi-Fi HTC Thunderbolt Verizon Motorola Droid 3 Verizon Samsung Galaxy Tab 10.1 4G Verizon HTC Wildfire S T-Mobile Motorola Droid 4 Verizon Samsung Galaxy Tab 10.1 Verizon Huawei Ascend II (M865) U.S. -

Recycle Cartridges and Cell Phones for Your Fundraising Organization!
About Us Support a School or Nonprofit Recycling Fundraising FAQs Blog Contact Us LOGIN Qualifying Items Cell Phones APPLE Part Number Points Cash Part Number Points Cash APPLE IPHONE 15.00 $6.00 APPLE IPHONE 3G 16GB 75.00 $30.00 APPLE IPHONE 3G 8GB 82.50 $33.00 APPLE IPHONE 3GS 16GB 150.00 $60.00 APPLE IPHONE 3GS 32GB 165.00 $66.00 APPLE IPHONE 4 16GB 225.00 $90.00 APPLE IPHONE 4 32GB 262.50 $105.00 APPLE IPHONE 4 8GB 172.50 $69.00 APPLE IPHONE 4S 16GB 322.50 $129.00 APPLE IPHONE 4S 32GB 412.50 $165.00 APPLE IPHONE 4S 64GB 525.00 $210.00 BLACKBERRY Part Number Points Cash Part Number Points Cash BLACKBERRY 8100 PEARL 7.50 $3.00 BLACKBERRY 8110 PEARL 7.50 $3.00 BLACKBERRY 8120 PEARL 7.50 $3.00 BLACKBERRY 8220 PEARL FLIP 7.50 $3.00 BLACKBERRY 8300 CURVE 15.00 $6.00 BLACKBERRY 8310 CURVE 15.00 $6.00 BLACKBERRY 8320 CURVE 15.00 $6.00 BLACKBERRY 8350I CURVE 7.50 $3.00 BLACKBERRY 8520 CURVE 60.00 $24.00 BLACKBERRY 8530 CURVE 7.50 $3.00 BLACKBERRY 8800 7.50 $3.00 BLACKBERRY 8820 7.50 $3.00 BLACKBERRY 8900 CURVE 40.00 $16.00 BLACKBERRY 9000 BOLD 40.00 $16.00 BLACKBERRY 9100 PEARL 3G 35.00 $14.00 BLACKBERRY 9105 PEARL 3G 75.00 $30.00 BLACKBERRY 9300 CURVE 3G 40.00 $16.00 BLACKBERRY 9330 CURVE 3G 7.50 $3.00 BLACKBERRY 9350 CURVE 15.00 $6.00 BLACKBERRY 9360 CURVE 3G 90.00 $36.00 BLACKBERRY 9370 CURVE 100.00 $40.00 BLACKBERRY 9380 CURVE 262.50 $105.00 BLACKBERRY 9500 STORM 22.50 $9.00 BLACKBERRY 9520 STORM 2 52.50 $21.00 BLACKBERRY 9530 STORM 20.00 $8.00 BLACKBERRY 9550 STORM 2 50.00 $20.00 BLACKBERRY 9630 TOUR 25.00 $10.00 BLACKBERRY 9650 BOLD -
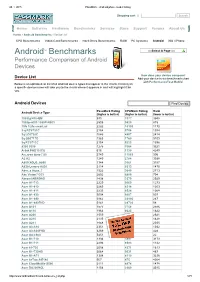
Androidtm Benchmarks
28. 1. 2015 PassMark Android phone model listing Shopping cart | Search Home Software Hardware Benchmarks Services Store Support Forums About Us Home » Android Benchmarks » Device List CPU Benchmarks Video Card Benchmarks Hard Drive Benchmarks RAM PC Systems Android iOS / iPhone TM Select A Page Android Benchmarks Performance Comparison of Android Devices How does your device compare? Device List Add your device to our benchmark chart with PerformanceTest Mobile! Below is an alphabetical list of all Android device types that appear in the charts. Clicking on a specific device name will take you to the charts where it appears in and will highlight it for you. Android Devices Find Device PassMark Rating CPUMark Rating Rank Android Device Type (higher is better) (higher is better) (lower is better) 1005tg N10QM 935 3377 3948 1080pn003 1080PN003 2505 9820 815 1life 1Life.smart.air 2282 10103 1170 3q RC9731C 2154 5756 1394 3q LC0720C 1646 4897 2414 3q QS0717D 1363 1760 3109 3q RC9712C 2154 5223 1396 9300 9300 1275 3364 3321 Alink PAD10 ICS 616 1130 4249 A.c.ryan dyno 7.85 2749 11065 596 A2 A2 1240 2784 3388 A800 XOLO_A800 1344 3661 3157 A830 Lenovo A830 2114 8313 1470 Abs_a Aqua_7 1522 3640 2713 Abc Vision7DCI 2602 6880 704 Abroad ABROAD 1438 3379 2929 Acer A1713 2229 9069 1273 Acer A1810 2265 8314 1203 Acer A1811 2233 8524 1268 Acer A1830 3004 9207 507 Acer A1840 3962 23996 267 Acer A1840FHD 5141 28720 58 Acer A101 1577 3758 2586 Acer A110 1964 8623 1822 Acer A200 1559 3822 2621 Acer A210 2135 8315 1428 Acer A211 1848 8130 2035 Acer A3A10 2351 8128 1032 Acer A3A20FHD 3269 11265 428 Acer AA3600 5451 22392 22 Acer B1710 1336 3897 3173 Acer B1711 2293 8583 1142 Acer b1720 2058 4371 1613 Acer B1730HD 3064 9031 487 Acer B1A71 1308 4119 3236 Acer beTouch E140 567 475 4264 Acer CloudMobile S500 2111 4874 1478 Acer DA220HQL 1156 2960 3545 http://www.androidbenchmark.net/device_list.php 1/71 28. -

Your HTC Amaze 4G User Guide 2 Contents Contents
Your HTC Amaze 4G User guide 2 Contents Contents Getting started Inside the box 8 HTC Amaze 4G 8 Back cover 10 SIM card 12 Storage card 13 Battery 14 Switching the power on or off 16 Setting up HTC Amaze 4G for the first time 17 Entering your PIN 17 Finger gestures 17 Ways of getting contacts into your phone 18 Home screen 19 Basics Adjusting the volume 21 Sleep mode 22 Status and notifications 23 Notifications panel 26 Where apps, data, and files are stored 28 Connecting your phone to a computer 28 Copying files to or from the phone storage or storage card 29 Copying text, looking up information, and sharing 30 Printing 31 Personalizing Making HTC Amaze 4G truly yours 32 Personalizing HTC Amaze 4G with scenes 32 Changing your wallpaper 33 Applying a new skin 34 Personalizing your Home screen with widgets 34 Adding icons and other shortcuts on your Home screen 36 Adding folders on your Home screen 36 Rearranging or removing widgets and icons on your Home screen 37 Rearranging the Home screen 38 Using sound sets 38 Rearranging or hiding application tabs 40 Customizing the lock screen 41 Phone calls Different ways of making calls 42 Making a call on the Phone dialer screen 42 3 Contents Using Speed dial 43 Calling a phone number in a text message 43 Calling a phone number in an email 44 Making an emergency call 44 Receiving calls 44 What can I do during a call? 45 Setting up a conference call 47 Internet calls 47 Using Call history 48 Using Home dialing 49 Call services 50 Turning Airplane mode on or off 51 Messages Opening Messages 52 Sending -

1 in the UNITED STATES DISTRICT COURT for the EASTERN DISTRICT of TEXAS MARSHALL DIVISION BARKAN WIRELESS TECHNOLOGIES, L.P. Pl
Case 2:16-cv-00063 Document 1 Filed 01/19/16 Page 1 of 9 PageID #: 1 IN THE UNITED STATES DISTRICT COURT FOR THE EASTERN DISTRICT OF TEXAS MARSHALL DIVISION BARKAN WIRELESS § TECHNOLOGIES, L.P. § § Plaintiff, § § Civ. Action No. 2:16-cv-00063 v. § § JURY DEMANDED T-MOBILE US, INC.; AND § T-MOBILE USA, INC., § § Defendants. ORIGINAL COMPLAINT FOR PATENT INFRINGEMENT Plaintiff Barkan Wireless Technologies, L.P. (“Barkan” or “Plaintiff”) files this complaint for patent infringement against T-Mobile US, Inc. and T-Mobile USA, Inc. (collectively “T-Mobile” or “Defendants”) and states as follows: THE PARTIES 1. Plaintiff Barkan Wireless Technologies, L.P. is a limited partnership organized under the laws of Texas with its principal place of business in Allen, Texas. 2. Defendant T-Mobile US, Inc. (“T-Mobile US”) is a Delaware corporation with its principal place of business in Bellevue, Washington. This Defendant may be served with process through its agent, Corporation Service Company, 2711 Centerville Road, Suite 400, Wilmington, Delaware 19808. This Defendant does business in the State of Texas and in the Eastern District of Texas. 3. T-Mobile US was originally incorporated as MetroPCS Communications, Inc. under the laws of the State of Delaware in 2004. The name of Metro PCS was changed to T-Mobile US on April 30, 2013. On information and belief, MetroPCS is an 1 Case 2:16-cv-00063 Document 1 Filed 01/19/16 Page 2 of 9 PageID #: 2 operating division of T-Mobile US that has a principal place of business at 2250 Lakeside Blvd., Richardson, Texas, 75082. -
Retail Branding Marketing Name Device Model AD681H
Retail Branding Marketing Name Device Model AD681H Smartfren Andromax AD681H FJL21 FJL21 T31 Panasonic T31 hws7721g MediaPad 7 Youth 2 3Q OC1020A OC1020A OC1020A 7Eleven IN265 IN265 IN265 A.O.I. ELECTRONICS FACTORY A.O.I. TR10CS1_11 TR10CS1 AG Mobile AG BOOST 2 BOOST2 E4010 AG Mobile AG Flair AG_Flair Flair AG Mobile AG Go Tab Access 2 AG_Go_Tab_Access_2 AG_Go_Tab_Access_2 AG Mobile AG Ultra2 AG_Ultra2 Ultra 2 AG Mobile AG_Go-Tab_Access md789hwag AG Go-Tab Access AG Mobile AG_Tab_7_0 AG_Tab_7_0 AG_Tab_7_0 AG Mobile Boost Boost Boost AG Mobile Chacer Chacer Chacer AG Mobile Freedom Access Freedom_Access Freedom Access AG Mobile Freedom E Freedom_E Freedom E AG Mobile Freedom Plus LTE Freedom_Plus_LTE Freedom Plus LTE AG Mobile Ghost Ghost Ghost AG Mobile Glow Glow Glow AG Mobile HASHTAG Hashtag Hashtag AG Mobile Hype Hype Hype AG Mobile Neon Neon Neon AG Mobile Quest Quest Quest AG Mobile Rage Rage Rage AG Mobile STYLE PLUS STYLE_PLUS STYLE_PLUS AG Mobile Shine Shine Shine AG Mobile Status Status Status AG Mobile Style Style Style AG Mobile Style_2 Style_2 Style 2 AG Mobile Swift Swift Swift AG Mobile Swift_Plus Swift_Plus Swift_Plus AG Mobile ULTRA Ultra Ultra AG Mobile Zenith Zenith Zenith AG Mobile Zone Zone Zone AG Mobile Zoom Zoom Zoom AMTC AMTC MD1001 Tablet MD1001 MD1001 AMTC AMTC MD7008 MD7008A MD7008 AMTC AMTC MD7081 MD7081A MD7081 ANS ANS Trailblazer rugged-smartphone H450R AOC A2272PWHT AOC_WW G2SMNT AOC AOC-A2272PW4T AOC_WW G3SMNTA22 AOC AOC-A2272PW4T AOC_WW G3SMNTA24 AOC AOC-A2472PW4T G3SMNTA24 G3SMNTA24 AT&T 9020A tint8_att -

Htc Droid Incredible 4G Usb Driver
Htc droid incredible 4g usb driver Couldn't connect your HTC Droid Incredible 4G to your PC? Well, you've come to the right place. Getting the proper drivers installed on your PC. DROID INCREDIBLE 4G LTE by HTC Support. Select a different device. Find device-specific support and online tools for your Droid Incredible 4G LTE .. If the driver software is not found, a Windows Operating System update may be needed. Come into our website and instantly download the HTC Droid Incredible 4G USB drivers for your Windows computer. Sync manager and other. I have collected a few different versions of unmodified HTC drivers for Windows, all pulled from the HTC Sync application. I thought I'd post pc won't install diag drivers! Please help. Download the latest HTC DROID INCREDIBLE 4G LTE Verizon device drivers (Official and Certified). HTC DROID INCREDIBLE 4G LTE Verizon drivers. HTC One A9, HTC One E9 dual sim, HTC Desire , HTC Desire , HTC One HTC Desire X, HTC Droid Incredible 4G, HTC E1, HTC EVO 4G LTE, HTC J, For example, the firmware for your device(s) and HTC Software features like. On this page, we have managed to share the official usb driver for HTC Droid Incredible 4G LTE Device. If in case you were already searching for the usb driver. Driver Supported Following Models Of HTC DROID Incredible 4G LTE: HTC DROID Incredible 4G LTE Modem / Com port / USB Driver. Direct Download USB Driver Verizon HTC Droid Incredible 4G LTE ADR - HTC Fireball For Windows 7-Xp-8 x86/x64, Free Download.