LU Decomposition
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Recursive Approach in Sparse Matrix LU Factorization
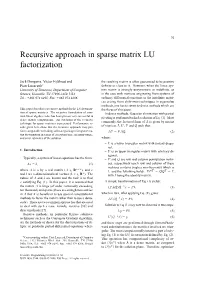
51 Recursive approach in sparse matrix LU factorization Jack Dongarra, Victor Eijkhout and the resulting matrix is often guaranteed to be positive Piotr Łuszczek∗ definite or close to it. However, when the linear sys- University of Tennessee, Department of Computer tem matrix is strongly unsymmetric or indefinite, as Science, Knoxville, TN 37996-3450, USA is the case with matrices originating from systems of Tel.: +865 974 8295; Fax: +865 974 8296 ordinary differential equations or the indefinite matri- ces arising from shift-invert techniques in eigenvalue methods, one has to revert to direct methods which are This paper describes a recursive method for the LU factoriza- the focus of this paper. tion of sparse matrices. The recursive formulation of com- In direct methods, Gaussian elimination with partial mon linear algebra codes has been proven very successful in pivoting is performed to find a solution of Eq. (1). Most dense matrix computations. An extension of the recursive commonly, the factored form of A is given by means technique for sparse matrices is presented. Performance re- L U P Q sults given here show that the recursive approach may per- of matrices , , and such that: form comparable to leading software packages for sparse ma- LU = PAQ, (2) trix factorization in terms of execution time, memory usage, and error estimates of the solution. where: – L is a lower triangular matrix with unitary diago- nal, 1. Introduction – U is an upper triangular matrix with arbitrary di- agonal, Typically, a system of linear equations has the form: – P and Q are row and column permutation matri- Ax = b, (1) ces, respectively (each row and column of these matrices contains single a non-zero entry which is A n n A ∈ n×n x where is by real matrix ( R ), and 1, and the following holds: PPT = QQT = I, b n b, x ∈ n and are -dimensional real vectors ( R ). -

Lecture 5 - Triangular Factorizations & Operation Counts
Lecture 5 - Triangular Factorizations & Operation Counts LU Factorization We have seen that the process of GE essentially factors a matrix A into LU. Now we want to see how this factorization allows us to solve linear systems and why in many cases it is the preferred algorithm compared with GE. Remember on paper, these methods are the same but computationally they can be different. First, suppose we want to solve A~x = ~b and we are given the factorization A = LU. It turns out that the system LU~x = ~b is \easy" to solve because we do a forward solve L~y = ~b and then back solve U~x = ~y. We have seen that we can easily implement the equations for the back solve and for homework you will write out the equations for the forward solve. Example If 0 2 −1 2 1 0 1 0 0 1 0 2 −1 2 1 A = @ 4 1 9 A = LU = @ 2 1 0 A @ 0 3 5 A 8 5 24 4 3 1 0 0 1 solve the linear system A~x = ~b where ~b = (0; −5; −16)T . ~ We first solve L~y = b to get y1 = 0, 2y1 +y2 = −5 implies y2 = −5 and 4y1 +3y2 +y3 = −16 T implies y3 = −1. Now we solve U~x = ~y = (0; −5; −1) . Back solving yields x3 = −1, 3x2 + 5x3 = −5 implies x2 = 0 and finally 2x1 − x2 + 2x3 = 0 implies x1 = 1 giving the solution (1; 0; −1)T . If GE and LU factorization are equivalent on paper, why would one be computationally advantageous in some settings? Recall that when we solve A~x = ~b by GE we must also multiply the right hand side by the Gauss transformation matrices. -

LU Factorization LU Decomposition LU Decomposition: Motivation LU Decomposition
LU Factorization LU Decomposition To further improve the efficiency of solving linear systems Factorizations of matrix A : LU and QR A matrix A can be decomposed into a lower triangular matrix L and upper triangular matrix U so that LU Factorization Methods: Using basic Gaussian Elimination (GE) A = LU ◦ Factorization of Tridiagonal Matrix ◦ LU decomposition is performed once; can be used to solve multiple Using Gaussian Elimination with pivoting ◦ right hand sides. Direct LU Factorization ◦ Similar to Gaussian elimination, care must be taken to avoid roundoff Factorizing Symmetrix Matrices (Cholesky Decomposition) ◦ errors (partial or full pivoting) Applications Special Cases: Banded matrices, Symmetric matrices. Analysis ITCS 4133/5133: Intro. to Numerical Methods 1 LU/QR Factorization ITCS 4133/5133: Intro. to Numerical Methods 2 LU/QR Factorization LU Decomposition: Motivation LU Decomposition Forward pass of Gaussian elimination results in the upper triangular ma- trix 1 u12 u13 u1n 0 1 u ··· u 23 ··· 2n U = 0 0 1 u3n . ···. 0 0 0 1 ··· We can determine a matrix L such that LU = A , and l11 0 0 0 l l 0 ··· 0 21 22 ··· L = l31 l32 l33 0 . ···. . l l l 1 n1 n2 n3 ··· ITCS 4133/5133: Intro. to Numerical Methods 3 LU/QR Factorization ITCS 4133/5133: Intro. to Numerical Methods 4 LU/QR Factorization LU Decomposition via Basic Gaussian Elimination LU Decomposition via Basic Gaussian Elimination: Algorithm ITCS 4133/5133: Intro. to Numerical Methods 5 LU/QR Factorization ITCS 4133/5133: Intro. to Numerical Methods 6 LU/QR Factorization LU Decomposition of Tridiagonal Matrix Banded Matrices Matrices that have non-zero elements close to the main diagonal Example: matrix with a bandwidth of 3 (or half band of 1) a11 a12 0 0 0 a21 a22 a23 0 0 0 a32 a33 a34 0 0 0 a43 a44 a45 0 0 0 a a 54 55 Efficiency: Reduced pivoting needed, as elements below bands are zero. -

LU-Factorization 1 Introduction 2 Upper and Lower Triangular Matrices
MAT067 University of California, Davis Winter 2007 LU-Factorization Isaiah Lankham, Bruno Nachtergaele, Anne Schilling (March 12, 2007) 1 Introduction Given a system of linear equations, a complete reduction of the coefficient matrix to Reduced Row Echelon (RRE) form is far from the most efficient algorithm if one is only interested in finding a solution to the system. However, the Elementary Row Operations (EROs) that constitute such a reduction are themselves at the heart of many frequently used numerical (i.e., computer-calculated) applications of Linear Algebra. In the Sections that follow, we will see how EROs can be used to produce a so-called LU-factorization of a matrix into a product of two significantly simpler matrices. Unlike Diagonalization and the Polar Decomposition for Matrices that we’ve already encountered in this course, these LU Decompositions can be computed reasonably quickly for many matrices. LU-factorizations are also an important tool for solving linear systems of equations. You should note that the factorization of complicated objects into simpler components is an extremely common problem solving technique in mathematics. E.g., we will often factor a polynomial into several polynomials of lower degree, and one can similarly use the prime factorization for an integer in order to simply certain numerical computations. 2 Upper and Lower Triangular Matrices We begin by recalling the terminology for several special forms of matrices. n×n A square matrix A =(aij) ∈ F is called upper triangular if aij = 0 for each pair of integers i, j ∈{1,...,n} such that i>j. In other words, A has the form a11 a12 a13 ··· a1n 0 a22 a23 ··· a2n A = 00a33 ··· a3n . -

Geometric Polarimetry − Part I: Spinors and Wave States
1 Geometric Polarimetry Part I: Spinors and − Wave States David Bebbington, Laura Carrea, and Ernst Krogager, Member, IEEE Abstract A new approach to polarization algebra is introduced. It exploits the geometric properties of spinors in order to represent wave states consistently in arbitrary directions in three dimensional space. In this first expository paper of an intended series the basic derivation of the spinorial wave state is seen to be geometrically related to the electromagnetic field tensor in the spatio-temporal Fourier domain. Extracting the polarization state from the electromagnetic field requires the introduction of a new element, which enters linearly into the defining relation. We call this element the phase flag and it is this that keeps track of the polarization reference when the coordinate system is changed and provides a phase origin for both wave components. In this way we are able to identify the sphere of three dimensional unit wave vectors with the Poincar´esphere. Index Terms state of polarization, geometry, covariant and contravariant spinors and tensors, bivectors, phase flag, Poincar´esphere. I. INTRODUCTION arXiv:0804.0745v1 [physics.optics] 4 Apr 2008 The development of applications in radar polarimetry has been vigorous over the past decade, and is anticipated to continue with ambitious new spaceborne remote sensing missions (for example TerraSAR-X [1] and TanDEM-X [2]). As technical capabilities increase, and new application areas open up, innovations in data analysis often result. Because polarization data are This work was supported by the Marie Curie Research Training Network AMPER (Contract number HPRN-CT-2002-00205). D. Bebbington and L. -

LU, QR and Cholesky Factorizations Using Vector Capabilities of Gpus LAPACK Working Note 202 Vasily Volkov James W
LU, QR and Cholesky Factorizations using Vector Capabilities of GPUs LAPACK Working Note 202 Vasily Volkov James W. Demmel Computer Science Division Computer Science Division and Department of Mathematics University of California at Berkeley University of California at Berkeley Abstract GeForce Quadro GeForce GeForce GPU name We present performance results for dense linear algebra using 8800GTX FX5600 8800GTS 8600GTS the 8-series NVIDIA GPUs. Our matrix-matrix multiply routine # of SIMD cores 16 16 12 4 (GEMM) runs 60% faster than the vendor implementation in CUBLAS 1.1 and approaches the peak of hardware capabilities. core clock, GHz 1.35 1.35 1.188 1.458 Our LU, QR and Cholesky factorizations achieve up to 80–90% peak Gflop/s 346 346 228 93.3 of the peak GEMM rate. Our parallel LU running on two GPUs peak Gflop/s/core 21.6 21.6 19.0 23.3 achieves up to ~300 Gflop/s. These results are accomplished by memory bus, MHz 900 800 800 1000 challenging the accepted view of the GPU architecture and memory bus, pins 384 384 320 128 programming guidelines. We argue that modern GPUs should be viewed as multithreaded multicore vector units. We exploit bandwidth, GB/s 86 77 64 32 blocking similarly to vector computers and heterogeneity of the memory size, MB 768 1535 640 256 system by computing both on GPU and CPU. This study flops:word 16 18 14 12 includes detailed benchmarking of the GPU memory system that Table 1: The list of the GPUs used in this study. Flops:word is the reveals sizes and latencies of caches and TLB. -

A Fast Method for Computing the Inverse of Symmetric Block Arrowhead Matrices
Appl. Math. Inf. Sci. 9, No. 2L, 319-324 (2015) 319 Applied Mathematics & Information Sciences An International Journal http://dx.doi.org/10.12785/amis/092L06 A Fast Method for Computing the Inverse of Symmetric Block Arrowhead Matrices Waldemar Hołubowski1, Dariusz Kurzyk1,∗ and Tomasz Trawi´nski2 1 Institute of Mathematics, Silesian University of Technology, Kaszubska 23, Gliwice 44–100, Poland 2 Mechatronics Division, Silesian University of Technology, Akademicka 10a, Gliwice 44–100, Poland Received: 6 Jul. 2014, Revised: 7 Oct. 2014, Accepted: 8 Oct. 2014 Published online: 1 Apr. 2015 Abstract: We propose an effective method to find the inverse of symmetric block arrowhead matrices which often appear in areas of applied science and engineering such as head-positioning systems of hard disk drives or kinematic chains of industrial robots. Block arrowhead matrices can be considered as generalisation of arrowhead matrices occurring in physical problems and engineering. The proposed method is based on LDLT decomposition and we show that the inversion of the large block arrowhead matrices can be more effective when one uses our method. Numerical results are presented in the examples. Keywords: matrix inversion, block arrowhead matrices, LDLT decomposition, mechatronic systems 1 Introduction thermal and many others. Considered subsystems are highly differentiated, hence formulation of uniform and simple mathematical model describing their static and A square matrix which has entries equal zero except for dynamic states becomes problematic. The process of its main diagonal, a one row and a column, is called the preparing a proper mathematical model is often based on arrowhead matrix. Wide area of applications causes that the formulation of the equations associated with this type of matrices is popular subject of research related Lagrangian formalism [9], which is a convenient way to with mathematics, physics or engineering, such as describe the equations of mechanical, electromechanical computing spectral decomposition [1], solving inverse and other components. -
LU and Cholesky Decompositions. J. Demmel, Chapter 2.7
LU and Cholesky decompositions. J. Demmel, Chapter 2.7 1/14 Gaussian Elimination The Algorithm — Overview Solving Ax = b using Gaussian elimination. 1 Factorize A into A = PLU Permutation Unit lower triangular Non-singular upper triangular 2/14 Gaussian Elimination The Algorithm — Overview Solving Ax = b using Gaussian elimination. 1 Factorize A into A = PLU Permutation Unit lower triangular Non-singular upper triangular 2 Solve PLUx = b (for LUx) : − LUx = P 1b 3/14 Gaussian Elimination The Algorithm — Overview Solving Ax = b using Gaussian elimination. 1 Factorize A into A = PLU Permutation Unit lower triangular Non-singular upper triangular 2 Solve PLUx = b (for LUx) : − LUx = P 1b − 3 Solve LUx = P 1b (for Ux) by forward substitution: − − Ux = L 1(P 1b). 4/14 Gaussian Elimination The Algorithm — Overview Solving Ax = b using Gaussian elimination. 1 Factorize A into A = PLU Permutation Unit lower triangular Non-singular upper triangular 2 Solve PLUx = b (for LUx) : − LUx = P 1b − 3 Solve LUx = P 1b (for Ux) by forward substitution: − − Ux = L 1(P 1b). − − 4 Solve Ux = L 1(P 1b) by backward substitution: − − − x = U 1(L 1P 1b). 5/14 Example of LU factorization We factorize the following 2-by-2 matrix: 4 3 l 0 u u = 11 11 12 . (1) 6 3 l21 l22 0 u22 One way to find the LU decomposition of this simple matrix would be to simply solve the linear equations by inspection. Expanding the matrix multiplication gives l11 · u11 + 0 · 0 = 4, l11 · u12 + 0 · u22 = 3, (2) l21 · u11 + l22 · 0 = 6, l21 · u12 + l22 · u22 = 3. -

Structured Factorizations in Scalar Product Spaces
STRUCTURED FACTORIZATIONS IN SCALAR PRODUCT SPACES D. STEVEN MACKEY¤, NILOUFER MACKEYy , AND FRANC»OISE TISSEURz Abstract. Let A belong to an automorphism group, Lie algebra or Jordan algebra of a scalar product. When A is factored, to what extent do the factors inherit structure from A? We answer this question for the principal matrix square root, the matrix sign decomposition, and the polar decomposition. For general A, we give a simple derivation and characterization of a particular generalized polar decomposition, and we relate it to other such decompositions in the literature. Finally, we study eigendecompositions and structured singular value decompositions, considering in particular the structure in eigenvalues, eigenvectors and singular values that persists across a wide range of scalar products. A key feature of our analysis is the identi¯cation of two particular classes of scalar products, termed unitary and orthosymmetric, which serve to unify assumptions for the existence of structured factorizations. A variety of di®erent characterizations of these scalar product classes is given. Key words. automorphism group, Lie group, Lie algebra, Jordan algebra, bilinear form, sesquilinear form, scalar product, inde¯nite inner product, orthosymmetric, adjoint, factorization, symplectic, Hamiltonian, pseudo-orthogonal, polar decomposition, matrix sign function, matrix square root, generalized polar decomposition, eigenvalues, eigenvectors, singular values, structure preservation. AMS subject classi¯cations. 15A18, 15A21, 15A23, 15A57, -

Linear Algebra - Part II Projection, Eigendecomposition, SVD
Linear Algebra - Part II Projection, Eigendecomposition, SVD (Adapted from Punit Shah's slides) 2019 Linear Algebra, Part II 2019 1 / 22 Brief Review from Part 1 Matrix Multiplication is a linear tranformation. Symmetric Matrix: A = AT Orthogonal Matrix: AT A = AAT = I and A−1 = AT L2 Norm: s X 2 jjxjj2 = xi i Linear Algebra, Part II 2019 2 / 22 Angle Between Vectors Dot product of two vectors can be written in terms of their L2 norms and the angle θ between them. T a b = jjajj2jjbjj2 cos(θ) Linear Algebra, Part II 2019 3 / 22 Cosine Similarity Cosine between two vectors is a measure of their similarity: a · b cos(θ) = jjajj jjbjj Orthogonal Vectors: Two vectors a and b are orthogonal to each other if a · b = 0. Linear Algebra, Part II 2019 4 / 22 Vector Projection ^ b Given two vectors a and b, let b = jjbjj be the unit vector in the direction of b. ^ Then a1 = a1 · b is the orthogonal projection of a onto a straight line parallel to b, where b a = jjajj cos(θ) = a · b^ = a · 1 jjbjj Image taken from wikipedia. Linear Algebra, Part II 2019 5 / 22 Diagonal Matrix Diagonal matrix has mostly zeros with non-zero entries only in the diagonal, e.g. identity matrix. A square diagonal matrix with diagonal elements given by entries of vector v is denoted: diag(v) Multiplying vector x by a diagonal matrix is efficient: diag(v)x = v x is the entrywise product. Inverting a square diagonal matrix is efficient: 1 1 diag(v)−1 = diag [ ;:::; ]T v1 vn Linear Algebra, Part II 2019 6 / 22 Determinant Determinant of a square matrix is a mapping to a scalar. -

Math 2270 - Lecture 27 : Calculating Determinants
Math 2270 - Lecture 27 : Calculating Determinants Dylan Zwick Fall 2012 This lecture covers section 5.2 from the textbook. In the last lecture we stated and discovered a number of properties about determinants. However, we didn’t talk much about how to calculate them. In fact, the only general formula was the nasty formula mentioned at the beginning, namely n det(A)= sgn(σ) a . X Y iσ(i) σ∈Sn i=1 We also learned a formula for calculating the determinant in a very special case. Namely, if we have a triangular matrix, the determinant is just the product of the diagonals. Today, we’re going to discuss how that special triangular case can be used to calculate determinants in a very efficient manner, and we’ll derive the nasty formula. We’ll also go over one other way of calculating a deter- minnat, the “cofactor expansion”, that, to be honest, is not all that useful computationally, but can be very useful when you need to prove things. The assigned problems for this section are: Section 5.2 - 1, 3, 11, 15, 16 1 1 Calculating the Determinant from the Pivots In practice, the easiest way to calculate the determinant of a general matrix is to use elimination to get an upper-triangular matrix with the same de- terminant, and then just calculate the determinant of the upper-triangular matrix by taking the product of the diagonal terms, a.k.a. the pivots. If there are no row exchanges required for the LU decomposition of A, then A = LU, and det(A)= det(L)det(U). -

LU Decomposition S = LU, Then We Can 1 0 0 2 4 −2 2 4 −2 Use It to Solve Sx = F
LU-Decomposition Example 1 Compare with Example 1 in gaussian elimination.pdf. Consider I The Gaussian elimination for the solution of the linear system Sx = f transforms the augmented matrix (Sjf) into (Ujc), where U 0 2 4 −21 is upper triangular. The transformations are determined by the S = 4 9 −3 : (1) matrix S only. @ A If we have to solve a system Sx = f~ with a different right hand side −2 −3 7 f~, then we start over. Most of the computations that lead us from We express Gaussian Elimination using Matrix-Matrix-multiplications (Sjf~) into (Ujc~), depend only on S and are identical to the steps that we executed when we applied Gaussian elimination to Sx = f. 0 1 0 0 1 0 2 4 −2 1 0 2 4 −2 1 We now express Gaussian elimination as a sequence of matrix-matrix I @ −2 1 0 A @ 4 9 −3 A = @ 0 1 1 A multiplications. This representation leads to the decomposition of S 1 0 1 −2 −3 7 0 1 5 into a product of a lower triangular matrix L and an upper triangular | {z } | {z } | {z } matrix U, S = LU. This is known as the LU-Decomposition of S. =E1 =S =E1S I If we have computed the LU decomposition S = LU, then we can 0 1 0 0 1 0 2 4 −2 1 0 2 4 −2 1 use it to solve Sx = f. @ 0 1 0 A @ 0 1 1 A = @ 0 1 1 A I We replace S by LU, 0 −1 1 0 1 5 0 0 4 LUx = f; | {z } | {z } | {z } and introduce y = Ux.