Dynamic Power Management for Multidomain System-On-Chip Platforms: an Optimal Control Approach
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Power Management 24
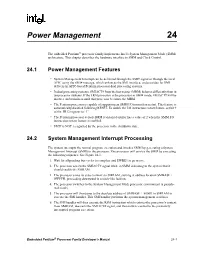
Power Management 24 The embedded Pentium® processor family implements Intel’s System Management Mode (SMM) architecture. This chapter describes the hardware interface to SMM and Clock Control. 24.1 Power Management Features • System Management Interrupt can be delivered through the SMI# signal or through the local APIC using the SMI# message, which enhances the SMI interface, and provides for SMI delivery in APIC-based Pentium processor dual processing systems. • In dual processing systems, SMIACT# from the bus master (MRM) behaves differently than in uniprocessor systems. If the LRM processor is the processor in SMM mode, SMIACT# will be inactive and remain so until that processor becomes the MRM. • The Pentium processor is capable of supporting an SMM I/O instruction restart. This feature is automatically disabled following RESET. To enable the I/O instruction restart feature, set bit 9 of the TR12 register to “1”. • The Pentium processor default SMM revision identifier has a value of 2 when the SMM I/O instruction restart feature is enabled. • SMI# is NOT recognized by the processor in the shutdown state. 24.2 System Management Interrupt Processing The system interrupts the normal program execution and invokes SMM by generating a System Management Interrupt (SMI#) to the processor. The processor will service the SMI# by executing the following sequence. See Figure 24-1. 1. Wait for all pending bus cycles to complete and EWBE# to go active. 2. The processor asserts the SMIACT# signal while in SMM indicating to the system that it should enable the SMRAM. 3. The processor saves its state (context) to SMRAM, starting at address location SMBASE + 0FFFFH, proceeding downward in a stack-like fashion. -
Power Management Using FPGA Architectural Features Abu Eghan, Principal Engineer Xilinx Inc
Power Management Using FPGA Architectural Features Abu Eghan, Principal Engineer Xilinx Inc. Agenda • Introduction – Impact of Technology Node Adoption – Programmability & FPGA Expanding Application Space – Review of FPGA Power characteristics • Areas for power consideration – Architecture Features, Silicon design & Fabrication – now and future – Power & Package choices – Software & Implementation of Features – The end-user choices & Enablers • Thermal Management – Enabling tools • Summary Slide 2 2008 MEPTEC Symposium “The Heat is On” Abu Eghan, Xilinx Inc Technology Node Adoption in FPGA • New Tech. node Adoption & level of integration: – Opportunities – at 90nm, 65nm and beyond. FPGAs at leading edge of node adoption. • More Programmable logic Arrays • Higher clock speeds capability and higher performance • Increased adoption of Embedded Blocks: Processors, SERDES, BRAMs, DCM, Xtreme DSP, Ethernet MAC etc – Impact – general and may not be unique to FPGA • Increased need to manage leakage current and static power • Heat flux (watts/cm2) trend is generally up and can be non-uniform. • Potentially higher dynamic power as transistor counts soar. • Power Challenges -- Shared with Industry – Reliability limitation & lower operating temperatures – Performance & Cost Trade-offs – Lower thermal budgets – Battery Life expectancy challenges Slide 3 2008 MEPTEC Symposium “The Heat is On” Abu Eghan, Xilinx Inc FPGA-101: FPGA Terms • FPGA – Field Programmable Gate Arrays • Configurable Logic Blocks – used to implement a wide range of arbitrary digital -
Clock Gating for Power Optimization in ASIC Design Cycle: Theory & Practice
Clock Gating for Power Optimization in ASIC Design Cycle: Theory & Practice Jairam S, Madhusudan Rao, Jithendra Srinivas, Parimala Vishwanath, Udayakumar H, Jagdish Rao SoC Center of Excellence, Texas Instruments, India (sjairam, bgm-rao, jithendra, pari, uday, j-rao) @ti.com 1 AGENDA • Introduction • Combinational Clock Gating – State of the art – Open problems • Sequential Clock Gating – State of the art – Open problems • Clock Power Analysis and Estimation • Clock Gating In Design Flows JS/BGM – ISLPED08 2 AGENDA • Introduction • Combinational Clock Gating – State of the art – Open problems • Sequential Clock Gating – State of the art – Open problems • Clock Power Analysis and Estimation • Clock Gating In Design Flows JS/BGM – ISLPED08 3 Clock Gating Overview JS/BGM – ISLPED08 4 Clock Gating Overview • System level gating: Turn off entire block disabling all functionality. • Conditions for disabling identified by the designer JS/BGM – ISLPED08 4 Clock Gating Overview • System level gating: Turn off entire block disabling all functionality. • Conditions for disabling identified by the designer • Suspend clocks selectively • No change to functionality • Specific to circuit structure • Possible to automate gating at RTL or gate-level JS/BGM – ISLPED08 4 Clock Network Power JS/BGM – ISLPED08 5 Clock Network Power • Clock network power consists of JS/BGM – ISLPED08 5 Clock Network Power • Clock network power consists of – Clock Tree Buffer Power JS/BGM – ISLPED08 5 Clock Network Power • Clock network power consists of – Clock Tree Buffer -

Computer Architecture Techniques for Power-Efficiency
MOCL005-FM MOCL005-FM.cls June 27, 2008 8:35 COMPUTER ARCHITECTURE TECHNIQUES FOR POWER-EFFICIENCY i MOCL005-FM MOCL005-FM.cls June 27, 2008 8:35 ii MOCL005-FM MOCL005-FM.cls June 27, 2008 8:35 iii Synthesis Lectures on Computer Architecture Editor Mark D. Hill, University of Wisconsin, Madison Synthesis Lectures on Computer Architecture publishes 50 to 150 page publications on topics pertaining to the science and art of designing, analyzing, selecting and interconnecting hardware components to create computers that meet functional, performance and cost goals. Computer Architecture Techniques for Power-Efficiency Stefanos Kaxiras and Margaret Martonosi 2008 Chip Mutiprocessor Architecture: Techniques to Improve Throughput and Latency Kunle Olukotun, Lance Hammond, James Laudon 2007 Transactional Memory James R. Larus, Ravi Rajwar 2007 Quantum Computing for Computer Architects Tzvetan S. Metodi, Frederic T. Chong 2006 MOCL005-FM MOCL005-FM.cls June 27, 2008 8:35 Copyright © 2008 by Morgan & Claypool All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means—electronic, mechanical, photocopy, recording, or any other except for brief quotations in printed reviews, without the prior permission of the publisher. Computer Architecture Techniques for Power-Efficiency Stefanos Kaxiras and Margaret Martonosi www.morganclaypool.com ISBN: 9781598292084 paper ISBN: 9781598292091 ebook DOI: 10.2200/S00119ED1V01Y200805CAC004 A Publication in the Morgan & Claypool Publishers -

Dynamic Voltage/Frequency Scaling and Power-Gating of Network-On-Chip with Machine Learning
Dynamic Voltage/Frequency Scaling and Power-Gating of Network-on-Chip with Machine Learning A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University In partial fulfillment of the requirements for the degree Master of Science Mark A. Clark May 2019 © 2019 Mark A. Clark. All Rights Reserved. 2 This thesis titled Dynamic Voltage/Frequency Scaling and Power-Gating of Network-on-Chip with Machine Learning by MARK A. CLARK has been approved for the School of Electrical Engineering and Computer Science and the Russ College of Engineering and Technology by Avinash Karanth Professor of Electrical Engineering and Computer Science Dennis Irwin Dean, Russ College of Engineering and Technology 3 Abstract CLARK, MARK A., M.S., May 2019, Electrical Engineering Dynamic Voltage/Frequency Scaling and Power-Gating of Network-on-Chip with Machine Learning (89 pp.) Director of Thesis: Avinash Karanth Network-on-chip (NoC) continues to be the preferred communication fabric in multicore and manycore architectures as the NoC seamlessly blends the resource efficiency of the bus with the parallelization of the crossbar. However, without adaptable power management the NoC suffers from excessive static power consumption at higher core counts. Static power consumption will increase proportionally as the size of the NoC increases to accommodate higher core counts in the future. NoC also suffers from excessive dynamic energy as traffic loads fluctuate throughout the execution of an application. Power- gating (PG) and Dynamic Voltage and Frequency Scaling (DVFS) are two highly effective techniques proposed in literature to reduce static power and dynamic energy in the NoC respectively. -

Power Reduction Techniques for Microprocessor Systems
Power Reduction Techniques For Microprocessor Systems VASANTH VENKATACHALAM AND MICHAEL FRANZ University of California, Irvine Power consumption is a major factor that limits the performance of computers. We survey the “state of the art” in techniques that reduce the total power consumed by a microprocessor system over time. These techniques are applied at various levels ranging from circuits to architectures, architectures to system software, and system software to applications. They also include holistic approaches that will become more important over the next decade. We conclude that power management is a multifaceted discipline that is continually expanding with new techniques being developed at every level. These techniques may eventually allow computers to break through the “power wall” and achieve unprecedented levels of performance, versatility, and reliability. Yet it remains too early to tell which techniques will ultimately solve the power problem. Categories and Subject Descriptors: C.5.3 [Computer System Implementation]: Microcomputers—Microprocessors;D.2.10 [Software Engineering]: Design— Methodologies; I.m [Computing Methodologies]: Miscellaneous General Terms: Algorithms, Design, Experimentation, Management, Measurement, Performance Additional Key Words and Phrases: Energy dissipation, power reduction 1. INTRODUCTION of power; so much power, in fact, that their power densities and concomitant Computer scientists have always tried to heat generation are rapidly approaching improve the performance of computers. levels comparable to nuclear reactors But although today’s computers are much (Figure 1). These high power densities faster and far more versatile than their impair chip reliability and life expectancy, predecessors, they also consume a lot increase cooling costs, and, for large Parts of this effort have been sponsored by the National Science Foundation under ITR grant CCR-0205712 and by the Office of Naval Research under grant N00014-01-1-0854. -
Happy: Hyperthread-Aware Power Profiling Dynamically
HaPPy: Hyperthread-aware Power Profiling Dynamically Yan Zhai, University of Wisconsin; Xiao Zhang and Stephane Eranian, Google Inc.; Lingjia Tang and Jason Mars, University of Michigan https://www.usenix.org/conference/atc14/technical-sessions/presentation/zhai This paper is included in the Proceedings of USENIX ATC ’14: 2014 USENIX Annual Technical Conference. June 19–20, 2014 • Philadelphia, PA 978-1-931971-10-2 Open access to the Proceedings of USENIX ATC ’14: 2014 USENIX Annual Technical Conference is sponsored by USENIX. HaPPy: Hyperthread-aware Power Profiling Dynamically Yan Zhai Xiao Zhang, Stephane Eranian Lingjia Tang, Jason Mars University of Wisconsin Google Inc. University of Michigan [email protected] xiaozhang,eranian @google.com lingjia,profmars @eesc.umich.edu { } { } Abstract specified power threshold by suspending a subset of jobs. Quantifying the power consumption of individual appli- Scheduling can also be used to limit processor utilization cations co-running on a single server is a critical compo- to reach energy consumption goals. Beyond power bud- nent for software-based power capping, scheduling, and geting, pricing the power consumed by jobs in datacen- provisioning techniques in modern datacenters. How- ters is also important in multi-tenant environments. ever, with the proliferation of hyperthreading in the last One capability that proves critical in enabling software few generations of server-grade processor designs, the to monitor and manage power resources in large-scale challenge of accurately and dynamically performing this datacenter infrastructures is the attribution of power con- power attribution to individual threads has been signifi- sumption to the individual applications co-running on cantly exacerbated. -

Learning-Directed Dynamic Voltage and Frequency Scaling Scheme with Adjustable Performance for Single-Core and Multi-Core Embedded and Mobile Systems †
sensors Article Learning-Directed Dynamic Voltage and Frequency Scaling Scheme with Adjustable Performance for Single-Core and Multi-Core Embedded and Mobile Systems † Yen-Lin Chen 1,* , Ming-Feng Chang 2, Chao-Wei Yu 1 , Xiu-Zhi Chen 1 and Wen-Yew Liang 1 1 Department of Computer Science and Information Engineering, National Taipei University of Technology, Taipei 10608, Taiwan; [email protected] (C.-W.Y.); [email protected] (X.-Z.C.); [email protected] (W.-Y.L.) 2 MediaTek Inc., Hsinchu 30078, Taiwan; [email protected] * Correspondence: [email protected]; Tel.: +886-2-27712171 (ext. 4239) † This paper is an expanded version of “Learning-Directed Dynamic Volt-age and Frequency Scaling for Computation Time Prediction” published in Proceedings of 2011 IEEE 10th International Conference on Trust, Security and Privacy in Computing and Communications, Changsha, China, 16–18 November 2011. Received: 6 August 2018; Accepted: 8 September 2018; Published: 12 September 2018 Abstract: Dynamic voltage and frequency scaling (DVFS) is a well-known method for saving energy consumption. Several DVFS studies have applied learning-based methods to implement the DVFS prediction model instead of complicated mathematical models. This paper proposes a lightweight learning-directed DVFS method that involves using counter propagation networks to sense and classify the task behavior and predict the best voltage/frequency setting for the system. An intelligent adjustment mechanism for performance is also provided to users under various performance requirements. The comparative experimental results of the proposed algorithms and other competitive techniques are evaluated on the NVIDIA JETSON Tegra K1 multicore platform and Intel PXA270 embedded platforms. -

Optimization of Clock Gating Logic for Low Power LSI Design
Optimization of Clock Gating Logic for Low Power LSI Design Xin MAN September 2012 Waseda University Doctoral Dissertation Optimization of Clock Gating Logic for Low Power LSI Design Xin MAN Graduate School of Information, Production and Systems Waseda University September 2012 Abstract Power consumption has become a major concern for usability and reliability problems of semiconductor products, especially with the significant spread of portable devices, like smartphone in recent years. Major source of dynamic power consumption is the clock tree which may account for 45% of the system power, and clock gating is a widely used technique to reduce this portion of power dissipation. The basic idea of clock gating is to reduce the dynamic power consumption of registers by switching off unnecessary clock signals to the registers selectively depending on the control signal without violating the functional correctness. Clock gating may lead to a considerable power reduction of overall system with proper control signals. Since the clock gating logic consumes chip area and power, it is imperative to minimize the number of inserted clock gating cells and their switching activity for power optimization. Commercial tools support clock gating as a power optimization feature based on the guard signal described in HDL and the minimum number of registers injecting the clock gating cell specified as the synthesis option (structural method). However, this approach requires manual identification of proper control signals and the proper grouping of registers to be gated. That is hard and designer-intensive work. Automatic clock gating generation and optimization is necessary. In this dissertation, we focus on the optimization of clock gating logic i ii based on switching activity analysis including clock gating control candidate extraction from internal signals in the original design and optimum control signal selection considering sharing of a clock gating cell among multiple registers for power and area optimization. -

White Paper | ADVANCED POWER MANAGEMENT HELPS BRING
White Paper | ADVANCED POWER MANAGEMENT HELPS BRING IMPROVED PERFORMANCE TO HIGHLY INTEGRATED X86 PROCESSORS TABLE OF CONTENTS THE IMPORTANCE OF POWER MANAGEMENT 3 THE X86 EXAMPLES 3 ESTABLISH A REALISTIC WORST-CASE FOR POWER 4 POWER LIMITS CAN TRANSLATE TO PERFORMANCE LIMITS 4 AMD TACKLES THE UNDERUSED TDP HEADROOM ISSUE 5 GOING ABOVE TDP 6 INTELLIGENT BOOST 7 CONFIGURABLE TDP 8 SUMMARY 9 Complex heterogeneous processors have the potential to leave a large amount of performance headroom untapped when workloads don’t utilize all cores. Advanced power management techniques for x86 processors are designed to reduce the power of underutilized cores while also allowing for dynamic allocation of the thermal budget between cores for improved performance. THE IMPORTANCE OF THE X86 EXAMPLE POWER MANAGEMENT Typical x86 processors widely used Those with experience implementing in both consumer and embedded microprocessors know the importance applications are a perfect example: of proper power management. Whether Integration of network and security for simple applications processors or engines, memory controllers, graphics high-end server processors, the ability processing units (GPUs), and video to down-clock, clock-gate, power-off, encode/decode engines has effectively or in some manner disable unused or turned them into heterogeneous underused hardware blocks is crucial in compute units that excel at a wide limiting power consumption. variety of workloads. Better power management benefits The notable thing about traditional range from energy savings within the reduction-based power management data center to improved battery life in is that a particular functional block is mobile devices. But don’t underestimate only turned off when unused, or down- the value of reducing power and clocked when higher performance is increasing efficiency. -

Mutual Impact Between Clock Gating and High Level Synthesis in Reconfigurable Hardware Accelerators
electronics Article Mutual Impact between Clock Gating and High Level Synthesis in Reconfigurable Hardware Accelerators Francesco Ratto 1 , Tiziana Fanni 2 , Luigi Raffo 1 and Carlo Sau 1,* 1 Dipartimento di Ingegneria Elettrica ed Elettronica, Università degli Studi di Cagliari, Piazza d’Armi snc, 09123 Cagliari, Italy; [email protected] (F.R.); [email protected] (L.R.) 2 Dipartimento di Chimica e Farmacia, Università degli Studi di Sassari, Via Vienna 2, 07100 Sassari, Italy; [email protected] * Correspondence: [email protected] Abstract: With the diffusion of cyber-physical systems and internet of things, adaptivity and low power consumption became of primary importance in digital systems design. Reconfigurable heterogeneous platforms seem to be one of the most suitable choices to cope with such challenging context. However, their development and power optimization are not trivial, especially considering hardware acceleration components. On the one hand high level synthesis could simplify the design of such kind of systems, but on the other hand it can limit the positive effects of the adopted power saving techniques. In this work, the mutual impact of different high level synthesis tools and the application of the well known clock gating strategy in the development of reconfigurable accelerators is studied. The aim is to optimize a clock gating application according to the chosen high level synthesis engine and target technology (Application Specific Integrated Circuit (ASIC) or Field Programmable Gate Array (FPGA)). Different levels of application of clock gating are evaluated, including a novel multi level solution. Besides assessing the benefits and drawbacks of the clock gating application at different levels, hints for future design automation of low power reconfigurable accelerators through high level synthesis are also derived. -

Dynamic Voltage and Frequency Scaling : the Laws of Diminishing Returns Authors Etienne Le Sueur and Gernot Heiser
Dynamic Voltage and Frequency Scaling : The laws of diminishing returns Authors Etienne Le Sueur and Gernot Heiser Workshop on Power Aware Computing and Systems, pp. 1–5, Vancouver, Canada, October, 2010 1. Senior Member of Technical Staff at Vmware. During the research he was at NICTA is Australia's Information and Communications Technology Presented By Research Centre of Excellence. 2. Scientia Professor and Prasanth B L John Lions Chair of Operating Systems Aakash Arora School of Computer science and Engineering UNSW , Sydney, Australia Introduction • What contributions are in this paper (according to the authors)? The Authors analyzed and examined the potential of DVFS across three platforms with recent generation of AMD processors in various aspects viz.,. Scaling of Silicon Transistor technology, Improved memory performance, Improved sleep/ idle mode, Multicore Processors. • What possible consequences can the contributions have? The results shows that on the most recent platform, the effectiveness of DVFS is markedly reduced, and actual savings are only observed when shorter executions (at higher frequency) are padded with the energy consumed when idle. Previous Works Before Author related to DVFS Previous research has attempted to leverage DVFS as a means to improve energy efficiency by lowering the CPU frequency when cycles are being wasted, stalled on memory resources. Energy can only be saved if the power consumption is reduced enough to cover the extra time it takes to run the work load at the lower frequency. "Hot" gigahertz Higher the frequency more the power consumption • An example to understand the scaling of Voltage and frequency by simple instruction execution Case 1: Equal execution time for each stage Case 2: Unequal execution time for each stage Previous Research works Referenced They used simulated execution traces and the level of slack time to choose a new CPU frequency at each OS scheduler invocation [7].