2007 Usatf Competition Rules
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2018 Iowa Association of Track Officials Manual
IOWA ASSOCIATION of TRACK OFFICIALS MEMO FROM: Cornie Wassink, Alton TO: IHSAA & IGHSAU Member High Schools DATE: February, 2019 RE: IATO Recommended Procedure Manual The updated materials for your 2019 Iowa Association of Track Officials Recommended Procedures Manual follow in this PDF file. Each year we update the contents of the manual as needed. These updates are based primarily on rule changes and also suggestions from our membership, the Iowa Association of Track Coaches, the Iowa High School Athletic Association (IHSAA) and the Iowa Girls’ High School Athletic Union (IGHSAU). Please feel free to suggest improvements for either the content or the format of this manual. The manual contains important suggestions pertaining to the use of red and white flags by field event officials and the Iowa uniform undergarment exception to the National Federation rules. Also note the change in the height of the boy’s shuttle hurdle relay to 36”, the need for manual timing backup for meets with just a single FAT timing system, and the addition of the 800m race in wheelchair competition. The officials’ edition of this manual contains five (5) additional sections of information pertaining specifically to starters and IATO members. This edition is only available to current IATO members from the IATO. Do not discard any materials from your current manual unless you have replacement material for it in this packet. Visit the official websites of the IHSAA and the IGHSAU for the current order of events for all 2019 girl’s, boy’s, and coed track and field meets. The primary objective of our organization is to improve the officiating and administration of the track and field meets in the state of Iowa. -

LETS MAKE TRACK WEIRD Off Distance Events, Mixed Gender
LETS MAKE TRACK WEIRD Off distance events, mixed gender relays, combined height field event relays, and so much more. The Jax Nitro Track & Field Special is a twist on the traditional track meet format. Based on Athletics Australia and Usain Bolts Nitro Athletics concept, this track meet focuses on the sports underlying principles of teamwork, power, endurance and technical skill in a fun and exciting way. ENTRY FEE $150 for both boys and girls Please make checks payable to Bishop Kenny HS. SCHEDULE FIELD EVENTS 10:00am Discus (B then G) – 6 entries Shot Put (G then B) – 6 entries Pole Vault (B and G together) – 6 entries High Jump (B and G together) – 6 entries Long Jump (G then B) – 6 entries RUNNING EVENTS Open - JV Races 10:00am - 60m Dash JV Open Run (FAT but unscored - G then B) – unlimited entries 11:00am - 1600m JV Open Run (FAT but unscored - G then B) – unlimited entries Varsity Races 12:00pm – 60m Dash Varsity Prelim (G then B) – 6 entries 12:30pm - 100m Low Hurdles (G) (run 30" height) – unlimited entries 12:50pm - 110m Intermediate Hurdles (B) (run at 36" height) – unlimited entries 1:10pm - 2400m Distance Medley Relay (mixed G800 - B800 - G400 - B400) – 2 relay team entries 1:30pm - 4x100m Relay (mixed 2G and 2B) – 2 relay team entries 1:45pm - 4x100m Throwers Relay (mixed 2G and 2B) – 1 relay team entry 2:00pm - 600m Run (G then B) – 4 entries 2:20pm - 800m Sprint Medley Relay (mixed G100-G100-B200-B400) – 1 relay team entry 2:30pm - 150m Dash (G then B) – 4 entries 2:50pm – 2000m Run (G then B) – 4 entries PRIMETIME 3:15 pm - 60m Dash Finals (G then B) – Top 5 advancing from prelim 3:25 pm - Elimination 1600m Run (G then B) – 4 entries 3:40 pm - 4x400m Relay (mixed 2G then 2B) – 1 relay team entry 4:00pm – Awards – Coaches meet at the High Jump pit to pick up t-shirts WHAT MAKES IT WEIRD? THE EVENTS Combined Time Hurdle Relay: The times of each schools top two boys and top two girls hurdlers will be added as a hurdle relay team. -

University/College Women 100 Meter Hurdles High
Wednesday March 27, 2019 Official Start Time 10:30 a.m. Heptathlon - University/College Women ● 100 Meter Hurdles ● High Jump ● Shot Put ● 200 Meter Dash 11:00 a.m. Decathlon - University/College Men ● 100 Meters ● Long Jump ● Shot Put ● High Jump ● 400 Meters Thursday March 28, 2019 10:00 a.m. Decathlon - University/College Men ● 110 Meter Hurdles ● Discus ● Pole Vault ● Javelin ● 1,500 Meters 11:00 a.m. Heptathlon - University/College Women ● Long Jump ● Javelin ● 800 Meters Running Events (Afternoon Session) 4:30 p.m. 400 Meter Hurdles - University/College Women (Prelims) 5:00 p.m. 400 Meter Hurdles - Univ/College Men (Prelims) Field Events (Prelims and Finals) 11:00 a.m. Hammer - University/College Women 2:00 p.m. Hammer - University/College Men 2:15 p.m. Javelin - University/College Men (Section B) 2:30 p.m. Pole Vault - University/College Men (Pit 1) Pole Vault - University/College Men (Pit 2) 5:15 p.m. Javelin - University/College Women (Section B) Running Events (Evening Session) 7:00 p.m. 800 Meters - Invitational Men 7:05 p.m. 800 Meters - Invitational Women 7:10 p.m. 1500 Meters - Univ/College Women (Section B) 7:20 p.m. 1500 Meters - University/College Men (Section B) 7:30 p.m. 1500 Meters - University/College Men (Section A) 7:40 p.m. 3,000 Meter Steeplechase - University/College Women 8:00 p.m. 3,000 Meter Steeplechase - University/College Men 8:15 p.m. 2,000 Meter Steeplechase - High School Girls 8:35 p.m. 2,000 Meter Steeplechase - High School Boys 9:00 p.m. -

Boys Outdoor
Relay Event Team Performances Dan Duffy (JR) - 4:37 4x1600m Matt Vargas (JR) - 4:43 Boys Outdoor Dylan Stinner (SO) - 4:52 Record I8:38.87 Joe DeVito (SO) - 4:34 Track & Field Records April 15, 2018 - Eagle Relays 2006-Present Relay Event Team Performances Mike Davies (SR) - 2:01.6 4x800m Ron Brown (SR) - 1:56.1 Nick Germe (SR) - 1:57.1 100m Top Performances 11.05 - Josh Pagan (2008) Jordan Boothe (SR) - 1:52.9 11.11 - Emilio Aponte (2009) Record 7:48.07 C.J. Bailey 11.25 - Alonzo Aponte (2014) June 9, 2011 - NJSIAA Meet of Champions 100m Class Records 3rd Place Overall at NJ Meet of Champions Freshman- 11.25 Alonzo Aponte (2014) Qualified and Ran in 2011 Penn relays 4x800 Record ii.03 Sophomore- 11.43 Thomas Mata (2016) May 8, 2014 - Ocean County Championships Junior- 11.05 Josh Pagan (2008) 100 M Event 2014 Ocean County Champion 100m Senior- 11.03 CJ Bailey (2014) Relay Event Team Performances 200m Top Performances Nick Germe (SR) - 50.2 22.36 - Emilio Aponte (2009) 4x400m Ron Brown (SR) - 50.5 22.50 - Josh Pagan (2008) Kristian Ruiz (SR) - 50.1 C.J. Bailey 22.69 - Alonzo Aponte (2015) Kindall Whack (JR) - 50.7 200m Class Records Freshman- 23.35 Alonzo Aponte (2014) Record 3:2I.84 Record 22.04 Sophomore- 22.69 Alonzo Aponte (2015) June 13, 2011 - NJSIAA Meet of Champions May 8, 2014 - Ocean County Championships Junior- 22.50 Josh Pagan (2008) 12th Place Overall at NJ Meet of Champions 200 M Event 2014 Ocean County Champion 200m Senior- 22.04 CJ Bailey (2014) 400m Top Performances 49.43 - Brandon McLish (2015) Relay Event C.J. -

Media Kit Contents
2005 IAAF World Outdoor Track & Field Championship in Athletics August 6-14, 2005, Helsinki, Finland Saturday, August 06, 2005 Monday, August 08, 2005 Morning session Afternoon session Time Event Round Time Event Round Status 10:05 W Triple Jump QUALIFICATION 18:40 M Hammer FINAL 10:10 W 100m Hurdles HEPTATHLON 18:50 W 100m SEMI-FINAL 10:15 M Shot Put QUALIFICATION 19:10 W High Jump FINAL 10:45 M 100m HEATS 19:20 M 10,000m FINAL 11:15 M Hammer QUALIFICATION A 20:05 M 1500m SEMI-FINAL 11:20 W High Jump HEPTATHLON 20:35 W 3000m Steeplechase FINAL 12:05 W 3000m Steeplechase HEATS 21:00 W 400m SEMI-FINAL 12:45 W 800m HEATS 21:35 W 100m FINAL 12:45 M Hammer QUALIFICATION B Tuesday, August 09, 2005 13:35 M 400m Hurdles HEATS Morning session 13:55 W Shot Put HEPTATHLON 11:35 M 100m DECATHLON\ Afternoon session 11:45 M Javelin QUALIFICATION A 18:35 M Discus QUALIFICATION A 12:10 M Pole Vault QUALIFICATION 18:40 M 20km Race Walking FINAL 12:20 M 200m HEATS 18:45 M 100m QUARTER-FINAL 12:40 M Long Jump DECATHLON 19:25 W 200m HEPTATHLON 13:20 M Javelin QUALIFICATION B 19:30 W High Jump QUALIFICATION 13:40 M 400m HEATS 20:05 M Discus QUALIFICATION B Afternoon session 20:30 M 1500m HEATS 14:15 W Long Jump QUALIFICATION 20:55 M Shot Put FINAL 14:25 M Shot Put DECATHLON 21:15 W 10,000m FINAL 17:30 M High Jump DECATHLON 18:35 W Discus FINAL Sunday, August 07, 2005 18:40 W 100m Hurdles HEATS Morning session 19:25 M 200m QUARTER-FINAL 11:35 W 20km Race Walking FINAL 20:00 M 3000m Steeplechase FINAL 11:45 W Discus QUALIFICATION 20:15 M Triple Jump QUALIFICATION -

Fully Automatic Timing for a Personal Device
Fully Automatic Timing for a Personal Device Jack Jorgensen Darin Im Department of Mechanical Engineering Department of Chemical Engineering Stanford University Stanford University Stanford, CA Stanford, CA Email: [email protected] Email: [email protected] Abstract—This paper presents a method for implementing fully II. DECRIPTION OF ALGORITHM automatic timing on a personal electronic device. An initial first- pass is done through all of the video frames, finding the A. Use subtracted image between the video frames and the initial image The user first takes a picture of the finish area where the of finish line to determine an estimated frame where the object runner will cross, then a column of pixels within the image is first crosses the finish line. After this frame has been found, the designated as the finish line. Next, a video of the run is SIFT and RANSAC algorithms are performed on a small window recorded and both the image and video are sent to be processed. of frames around the estimated finish frame and correct for any The flow chart of the image processing algorithm can be found camera translation or rotation that may have taken place. The subtraction algorithm is then repeated on this small window of in Appendix B. It is assumed that the picture and video are corrected frames to find the final finish frame. Experimental recorded orthogonal to the plane of motion. This is likely a results show the proposed method performs well in a variety of reasonable assumption since professional timing systems conditions. operate in this manner and a human timer would position themselves orthogonal to the plane of motion to obtain the I. -

Colin Shields 4.5Mile 29/10/11 Trainer & Coyle Take Early Lead
Colin Shields 4.5Mile 29/10/11 Trainer & Coyle Take Early Lead Junior results to follow. Well done everyone for a fantastic record turnout. Suzanne Coyle and Stephen Trainer swept aside the opposition in the wet and windy conditions to win in Greenock Glenpark Harriers Colin Shields trophy race. A total of 58 seniors were set off in pairs at 30 second intervals, a format more common with cycling events, rarely in running, tested the runners mental concentration and toughness as they pitted themselves against the clock. The Harriers who have had a surge of women joining over recent months and were delighted to see a record 17 compete in one of the clubs toughest races, a time trial over the hilly 4 ½ mile route around Larkfield and back to the Dunlop street. With the added competition, pre-race favourite Suzanne Coyle knew it was going to be hard with her biggest threat Jillian McNee starting 30 seconds behind her. Coyle never let the pressure get to her as she attempted to shake off McNee who was working hard and maintaining the gap. Only in the 2nd half of the race as the pair battled it out pulling in all 16 of the earlier starters did the gap grow when Jillian began to tire. Veteran runners Lorna Coyle and Susan Clark who have been in great shape recently, were next quickest, with the following 8 woman led by Fiona Cushnaghan separated by a little over a minute, leaving the prospect of a fascinating championship over the coming season. Club Champion Stephen Trainer had the benefit of starting in the last pairing knowing he could respond to any moves by brothers Alan and David Henderson. -
About the Program Schedule Canceling a Meet Eligibility
ABOUT THE PROGRAM The objectives of our program are to unite the youth of our parishes and to help promote their spiritual, physical and social welfare by bringing Catholic truths, principles and ideas into their everyday life. The programs are intended to be character builders, reflecting the ideals of good sportsmanship and Christianity. Once an individual accepts the position as coach in the Diocesan Recreation Association program, he or she accepts the responsibility to implement the philosophy of the Association. SCHEDULE 1. This year the season will consist of 2 Qualifying Meets and 1 Championship Meet. 2. At this time we do not have a “rain” date. IF needed, I will look into it. 3. The dates of the Track Meets are April 10, April 24 and May 8. CANCELING A MEET 1. Track & Field is an outdoor sport. Canceling a meet is a difficult decision and is usually done due to inclement weather. 2. The decision to cancel a meet can be done as early as the day before or as late as 2 hours prior to the start of a meet. 3. Notification will be made via email to the track coaches and Athletic Directors. 4. Canceling simply means that meet will be contested on the next scheduled date pushing each subsequent meet forward. ELIGIBILITY FORMS & FEES 1. All on line eligibility lists, parent consent cards and fees are due in the Diocesan Recreation Office by 9:00am Monday, March 29, 2021. All copies are to be submitted electronically. 2. The league fee is $60.00 for boys and $60.00 for girls, for a total of $120. -

JOE BRANDI RELAYS 2020 High School Girls Meet Friday and Saturday, April 17Th and 18Th, 2020 Connetquot HS
JOE BRANDI RELAYS 2020 High School Girls Meet Friday and Saturday, April 17th and 18th, 2020 Connetquot HS Friday Elite Individual Events Under the Lights: Every team can enter up to two athletes per Friday event regardless of seed time but if you want to enter more than 2 they ALL must be able to break the seed time. WE WILL RUN AHEAD OF SCHEDULE IF POSSIBLE. 6:00 pm Pentathlon Long Jump 7:00 1500 (5:30) 7:15 Pentathlon Hurdles 7:20 100 Hurdles trials (19.0) 7:35 100 trials (14.0) 7:50 400 (66.0) 8:00 Pentathlon High Jump 8:05 3000 Racewalk (8:45 for 1500 walk) 8:25 100 Hurdles final 8:30 100 final 8:35 800 (2:40) 8:45 3000 (12:00) 9:00 200 (29.0) Saturday Events: Track Events Field Events 9:30 2 x 400 Hurdles 9:30 2 x Long Jump (3 team max) 9:55 4 x 1600 TBA 2 x Triple Jump (3 team max) 10:30 4 x 100 9:30 2 x High Jump 11:00 2 x 1500 Walk 9:30 2 x Shot Put (Pentathlon shot first) 11:30 Mile Medley (400-200-200-800) 9:30 2 x Discus 12:10 4 x 400 9:30 2 x Pole Vault 12:40 Shuttle Hurdles (4-girl) 12:55 2 x 2000 Steeplechase 1:30 Pentathlon 800 1:35 4 x 200 2:00 Swedish Medley (100-200-300-400) 2:15 4 x 800 2:50 Sprint Medley (100-100-200-400) 3:10 Distance Medley (1200-400-800-1600) Things you should know… • We will be selling Joe Brandi short sleeve shirts for $12. -
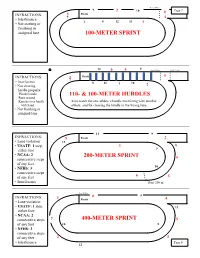
100-Meter Hurdles 200-Meter Sprint 400-Meter Sprint
Start 100 m 9 2 10 6 Page 7 5 Finish INFRACTIONS: 4 • Interference 7 8 12 11 • Not starting or 1 3 finishing in assigned lane 100-METER SPRINT 12 6 4 9 Start 100 m Start 110 m 5 INFRACTIONS: 3 Finish 7 • Interference 8 11 1 10 • Not clearing 2 hurdle properly: Hooks hurdle 110- & 100-METER HURDLES Runs around Knocks over hurdle Also watch for one athlete’s hurdle interfering with another with hand athlete, and for clearing the hurdle in the wrong lane. • Not finishing in assigned lane 11 9 INFRACTIONS: 5 Finish 2 • Lane violation 12 • USATF: 1 step, 1 8 either foot 7 • NCAA: 2 200-METER SPRINT 4 consecutive steps of any feet • NFHS: 3 10 consecutive steps 6 of any feet 3 • Interference Start 200 m Start 400 m 9 INFRACTIONS: 6 1 Finish 4 • Lane violation • USATF: 1 step, 11 either foot • NCAA: 2 consecutive steps 7 400-METER SPRINT 5 of any feet 10 8 • NFHS: 3 consecutive steps of any feet 2 3 • Interference Page 8 12 Start 400 m INFRACTIONS: 1 5 8 Page 9 Finish • Interference 4 • Not clearing hurdle properly [See 100/110 400-METER HURDLES hurdles.] 10 6 (& 300-m & 200-m hurdles) • Lane violation 9 11 2 3 12 7 Start 800 m 5 6 INFRACTIONS: 1 Finish • Interference • Cutting in before 10 800-METER RUN 12 breakline 8 (could have alley start; coned every 4 m to breakline) 11 • Lane violation If in lanes, cones out at start; remove from inside lanes before 9 after the 1st pass of runners. -

“Where the Best Meet the Best!”
“Where the Best Meet the Best!” (16 of the best performance in the state in each event compete for top honors!) 1 Welcome to Grand Rapids Public Schools Teresa Weatherall Neal Superintendent of Schools Dear Students, Parents, Prospective Parents, and Community Stakeholders: For more than 150 years, our highly qualified, dedicated and compassionate educators have been serving the children and families of this great community. We have a long standing tradition and legacy of cultivating the talents of our students so they may achieve their greatest potential and go on to change the world. We have produced astronauts, U.S. Senators, Mayors, movie stars, nuclear scientists, famous authors, a Nobel Peace prize winner, professional athletes, Civil Rights leaders, industrialists, and a First Lady of the United States of America, just to name a few. This is because of our deep rooted belief that all children can reach their academic potential through effort, high expectations, and strong support systems. GRPS has more than 1,400 highly qualified teachers who rank among the best, most dedicated, hard working educational professionals in this entire state. This includes more than 170 highly qualified, bilingual teachers and support staff that help set this district apart from the rest in serving English Language Learners. Just recently, the State Superintendent named one of our Ottawa Hills High School teachers the 2012-2013 Michigan Teacher of the Year. I believe this speaks volumes and is truly symbolic of the tremendous talent we have in this district working to support the success of our students. Athletic Vision Statement “Grand Rapids Public Schools will create educational opportunities and experiences, through athletics, that will enhance student achievement, student development and school culture.” 2 3 January 1, 2016 Dear Coach, There is a new Track & Field invitational coming in 2016 and we are extending a special invitation to you and your program. -

Thursday, March 25, 2021 - SESSION 1 Stadium Events- Session 1
Thursday, March 25, 2021 - SESSION 1 Stadium Events- Session 1 10:00 AM BOYS - Middle School Long Jump FINAL 10:00 AM BOYS - Middle School Pole Vault FINAL 10:00 AM BOYS - Middle School 110m Hurdles (33") Qualifying 10:15 AM BOYS - Freshman 110m Hurdles (39") Qualifying 10:30 AM GIRLS - Middle School 100m Hurdles (30") Qualifying 10:45 AM GIRLS - Freshman 100m Hurdles (33") Qualifying 11:00 AM Decathlon 100m Decathlon 11:00 AM BOYS - Middle School High Jump FINAL 11:25 AM Middle School - 100m Qualifying 11:55 AM Freshman - 100m Qualifying 12:25 PM Middle School - 400m FINAL 12:55 PM Freshman - 400m FINAL 1:00 PM GIRLS - Middle School Pole Vault FINAL 1:00 PM GIRLS - Middle School Long Jump (pit 1) FINAL 1:25 PM BOYS - Middle School 110m Hurdles (33") FINAL 1:30 PM BOYS - Freshman 110m Hurdles (39") FINAL 1:30 PM GIRLS - Middle School High Jump FINAL 1:30 PM Decathlon Long Jump (pit 2) Decathlon 1:35 PM GIRLS - Middle School 100m Hurdles (30") FINAL 1:40 PM GIRLS - Freshman 100m Hurdles (33") FINAL 1:45 PM Middle School - 100m FINAL 1:50 PM Freshman - 100m FINAL Shot Put Events - Session 1 10:00 AM BOYS - Middle School Shot Put (4kg) FINAL 12:30 PM GIRLS - Middle School Shot Put (6 lb) FINAL Discus/Hammer Events - Session 1 10:00 AM BOYS - Freshman Discus (1.6kg) FINAL 12:30 PM GIRLS - Freshman Discus (1kg - same as HS) FINAL Javelin Events - Session 1 10:00 AM GIRLS - Middle School Javelin (600g) FINAL 12:30 PM BOYS - Middle School Javelin (600g) FINAL Thursday, March 25, 2021 - SESSION 2 Stadium Events - Session 2 3:00 PM BOYS - Freshman