Modeling a Dual Mirror Cherenkov Telescope to Analyse Pointing Precision
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Next Generation of Cherenkov Telescopes. a White Paper for INAF*
The Next Generation of Cherenkov Telescopes. A White Paper for INAF*. (Artist view of CTA - courtesy of CTA Collaboration.) Prepared by: L. A. Antonelli1, P. Blasi2, G. Bonanno3, O. Catalano4, S. Covino5, A. De Angelis7, B. De Lotto7, M. Ghigo5, G. Ghisellini5, G.L. Israel1, A. La Barbera4, G. Pareschi5, M. Persic6, M. Roncadelli8, B. Sacco4, M. Salvati2, F. Tavecchio5, P. Vallania9 1INAF-Osservatorio Astronomico di Roma 2INAF-Osservatorio Astrofisico di Arcetri 3INAF-Osservatorio Astrofisico di Catania 4INAF-Istituto di Astrofisica Spaziale e Fisica Cosmica, Palermo 5INAF-Osservatorio Astronomico di Brera 6INAF-Osservatorio Astronomico di Trieste 7Università degli Studi di Udine, 8INFN-Pavia 9INAF-Istituto di Fisica dello Spazio Interplanetario, Torino * INAF: Italian National Institute for Astrophysics 1 2 Contents. Contents.......................................................................................................................................... 3 Executive Summary........................................................................................................................ 5 1 Introduction. ............................................................................................................................. 7 1.1 Ground-based Gamma-ray Astronomy: Historical Overview. ............................................. 7 1.2 The Imaging Atmospheric Cherenkov Technique. .............................................................. 8 1.3 The current status of IACTs............................................................................................... -

The Cherenkov Telescope Array Observatory Comes of Age
The Organisation DOI: 10.18727/0722-6691/5194 The Cherenkov Telescope Array Observatory Comes of Age Federico Ferrini 1 Conceived around a decade ago by a the detection of a clear signal from Wolfgang Wild 1, 2 group of scientists, we are now on the the Crab nebula above 1 TeV with the cusp of constructing the largest observa- Whipple 10-m imaging atmospheric tory to study the gamma-ray Universe. Cherenkov telescope (IACT). Since then, 1 CTAO, Heidelberg (DE) and Bologna (IT) Here we present a short look back at the the instrumentation for, and techniques 2 ESO evolution and recent matu ration of the of, astronomy with IACTs have evolved CTA project, as well as an outline of our to the extent that a flourishing new scien- expectations for the near future. A com- tific discipline has been established, with The Cherenkov Telescope Array (CTA) is prehensive introduction to CTA, including the detection of more than 150 sources the next-generation ground-based the detection technique, its history, the and a major impact in astrophysics — observatory for gamma-ray astronomy extraordinary improvements with respect and, more widely, in physics. The current at very high energies. With up to 120 to previous experimental facilities, and the major arrays of IACTs (the High Energy telescopes on two sites, CTA will be the scientific objectives has been provided by Stereoscopic System [H.E.S.S.], the world’s largest and most sensitive Werner Hofmann, Spokesperson of the Major Atmospheric Gamma Imaging high-energy gamma-ray observatory CTA Consortium (Hofmann, 2017). Cherenkov Telescope [MAGIC], and the covering the entire sky. -
The IACT/ATMO Package
The IACT/ATMO package Introduction to the IACT/ATMO package This is the README file for the CORSIKA supplements for Cherenkov light by Konrad Bernlohr.¨ It was last updated for release 1.63 (November 2020). The Software and data files provided with this package are intended to enhance the COR- SIKA air shower simulation program by a) tabulated atmospheres for different climate zones, including accurate indices of refrac- tion and b) a flexible interface for arbitrary configurations of Cherenkov light detectors, which don’t need to be in a horizontal plane. Although intended for systems of Imaging Atmospheric Cherenkov Telescopes (IACTs), it can be used for any kind of Cherenkov detectors. c) A machine-independent output format for the ’photon bunches’ collected at each of the assumed telescopes or other detector (format and relevant software termed ’eventio’). If you find this software useful for your work, a reference in your publications to • K. Bernlohr,¨ Simulation of Imaging Atmospheric Cherenkov Telescopes with COR- SIKA and sim telarray, Astroparticle Physics 30 (2008) 149–158. [arXiv:0808.2253] would be appreciated. The main CORSIKA distribution comes with suitable function interfaces which can be selected in the compiler pre-processing step. See the IACT and ATMEXT options in the COR- SIKA User’s Guide. For successfully compiling and linking CORSIKA when either or both of these options is selected, you need the software provided here. CORSIKA versions 6.4xx to 7.7400 are supported by this package. For support to older CORSIKA versions (5.8xx to 6.3xx), use version 1.47 of the IACT/ATMO package. -

Investigation on Gamma-Electron Air Shower Separation for CTA
Taras Shevchenko National University of Kyiv The Faculty of Physics Astronomy and Space Physics Department Investigation on gamma-electron air shower separation for CTA Field of study: 0701 { physics Speciality: 8.04020601 { astronomy Specialisation: astrophysics Master's thesis the second year master student Iryna Lypova Supervisor: Dr. Gernot Maier leader of Helmholtz-University Young Investigator Group at DESY and Humboldt University (Berlin) Kyiv, 2013 Contents Introduction 2 1 Extensive air showers 3 1.1 Electromagnetic showers . 3 1.2 Hadronic showers . 7 1.3 Cherenkov radiation . 11 2 Cherenkov technique 13 2.1 Cherenkov telescopes . 13 2.2 Cherenkov Telescope Array . 18 2.3 Air shower reconstruction . 24 3 γ-electron separation with telescope arrays 31 3.1 Hybrid array . 31 3.2 The Cherenkov Telescope Array . 39 Summary 42 Reference 44 Appendix A 47 Appendix B 50 Introduction Very high energy (VHE) ground-based γ-ray astrophysics is a quite young science. The earth atmosphere absorbs gamma-rays and direct detection is possible only with satellite or balloon experiments. The flux of gamma rays falls rapidly with increasing energy and satellite detectors become not effective anymore due to the limited collection area. Another possibility for gamma- ray detection is usage of Imaging Atmospheric Cherenkov telescopes. The primary γ-ray creates a cascade of the secondary particles which move through the atmosphere. The charged component of the cascade which moves with velocities faster the light in the air, emits Cherenkov light which can be detected by the ground based optical detectors. The ground based gamma astronomy was pioneered by the 10 m single Cherenkov telescope WHIPPLE (1968) [1] in Arizona. -
Astro-Particle Physics: Imaging Air Cherenkov Telescopes (Iacts)
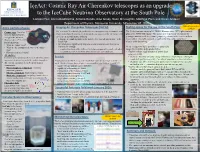
IceAct: Cosmic Ray Air Cherenkov telescopes as an upgrade to the IceCube Neutrino Observatory at the South Pole Larissa Paul, Anna AbadSantos, Antonio Banda, Aine Grady, Sean McLaughlin, Matthias Plum and Karen Andeen Department of Physics, Marquette University, Milwaukee WI, USA Student researchers Astro-particle physics: Imaging Air Cherenkov Telescopes (IACTs): Testing epoxy for the use at the South Pole: at work • Cosmic rays - Particles Source? IACTs detect Cherenkov light produced in the atmosphere by air showers: this The IceAct cameras consist of 61 PMMA Winston cones (WCs) glued onto the with the highest known allows us to study the purely electromagnetic component of the air shower with glass of 61 SiPMs with epoxy. The epoxy used in previous versions of the energy in the universe excellent energy and mass resolution prototype was not cold-rated, causing rapid degradation of the camera at Polar • Discovered in 1912, still a • technique is complementary to the particle detectors already in place at the temperatures. A reliable cold-rated epoxy is vital to ensure many years South Pole of successful data taking. the IceAct lot of unknowns: camera • What are cosmic rays? • will allow us to significantly improve several measurements that we are • What are the astrophysical sources of cosmic interested in through: We are testing two different cold-rated epoxies for rays? • cross-calibrations of the different detector components against each other long-term reliability and reproducibility: • How are they accelerated? • reconstruction of events with different detector configurations • Goal #1: release equal amounts of epoxy drops • Air showers onto each SiPM. Cascades of secondary particles generated by cosmic IceAct: • Problem: viscosity of epoxy changes with time exposed to air, causing the ray particles interacting with the earth's atmosphere. -

Cosmic-Ray Studies with Experimental Apparatus at LHC
S S symmetry Article Cosmic-Ray Studies with Experimental Apparatus at LHC Emma González Hernández 1, Juan Carlos Arteaga 2, Arturo Fernández Tellez 1 and Mario Rodríguez-Cahuantzi 1,* 1 Facultad de Ciencias Físico Matemáticas, Benemérita Universidad Autónoma de Puebla, Av. San Claudio y 18 Sur, Edif. EMA3-231, Ciudad Universitaria, 72570 Puebla, Mexico; [email protected] (E.G.H.); [email protected] (A.F.T.) 2 Instituto de Física y Matemáticas, Universidad Michoacana, 58040 Morelia, Mexico; [email protected] * Correspondence: [email protected] Received: 11 September 2020; Accepted: 2 October 2020; Published: 15 October 2020 Abstract: The study of cosmic rays with underground accelerator experiments started with the LEP detectors at CERN. ALEPH, DELPHI and L3 studied some properties of atmospheric muons such as their multiplicity and momentum. In recent years, an extension and improvement of such studies has been carried out by ALICE and CMS experiments. Along with the LHC high luminosity program some experimental setups have been proposed to increase the potential discovery of LHC. An example is the MAssive Timing Hodoscope for Ultra-Stable neutraL pArticles detector (MATHUSLA) designed for searching of Ultra Stable Neutral Particles, predicted by extensions of the Standard Model such as supersymmetric models, which is planned to be a surface detector placed 100 meters above ATLAS or CMS experiments. Hence, MATHUSLA can be suitable as a cosmic ray detector. In this manuscript the main results regarding cosmic ray studies with LHC experimental underground apparatus are summarized. The potential of future MATHUSLA proposal is also discussed. Keywords: cosmic ray physics at CERN; atmospheric muons; trigger detectors; muon bundles 1. -

Towards Open and Reproducible Multi-Instrument Analysis in Gamma-Ray Astronomy C
A&A 625, A10 (2019) Astronomy https://doi.org/10.1051/0004-6361/201834938 & c ESO 2019 Astrophysics Towards open and reproducible multi-instrument analysis in gamma-ray astronomy C. Nigro1, C. Deil2, R. Zanin2, T. Hassan1, J. King3, J. E. Ruiz4, L. Saha5, R. Terrier6, K. Brügge7, M. Nöthe7, R. Bird8, T. T. Y. Lin9, J. Aleksic´10, C. Boisson11, J. L. Contreras5, A. Donath2, L. Jouvin10, N. Kelley-Hoskins1, B. Khelifi6, K. Kosack12, J. Rico10, and A. Sinha6 1 DESY, Platanenallee 6, 15738 Zeuthen, Germany e-mail: [email protected] 2 Max-Planck-Institut für Kernphysik, PO Box 103980, 69029 Heidelberg, Germany 3 Landessternwarte, Universität Heidelberg, Königstuhl, 69117 Heidelberg, Germany 4 Instituto de Astrofísica de Andalucía – CSIC, Glorieta de la Astronomía s/n, 18008 Granada, Spain 5 Unidad de Partículas y Cosmología (UPARCOS), Universidad Complutense, 28040 Madrid, Spain 6 APC, AstroParticule et Cosmologie, Université Paris Diderot, CNRS/IN2P3, CEA/Irfu, Observatoire de Paris, Sorbonne Paris Cité, 10 rue Alice Domon et Léonie Duquet, 75205 Paris Cedex 13, France 7 TU Dortmund, Astroteilchenphysik E5b, 44227 Dortmund, Deutschland 8 Department of Physics and Astronomy, University of California, Los Angeles, CA 90095, USA 9 Physics Department, McGill University, Montreal, QC H3A 2T8, Canada 10 Institut de Astrofísica d’Altes Energies (IFAE), The Barcelona Institute of Science and Technology (BIST), 08193 Bellaterra, Barcelona, Spain 11 LUTH, Observatoire de Paris, PSL Research University, CNRS, Université Paris Diderot, 5 Place Jules Janssen, 92190 Meudon, France 12 IRFU, CEA, Université Paris-Saclay, 91191 Gif-sur-Yvette, France Received 20 December 2018 / Accepted 14 March 2019 ABSTRACT The analysis and combination of data from different gamma-ray instruments involves the use of collaboration proprietary software and case-by-case methods. -
Gamma-Ray (+CR) Detection Principle of IACT(Imaging Atmospheric Cherenkov Telescope) Current IACT Systems and CTA Simul
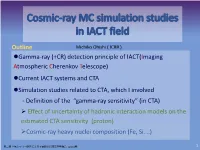
Outline Michiko Ohishi ( ICRR ) ⚫Gamma-ray (+CR) detection principle of IACT(Imaging Atmospheric Cherenkov Telescope) ⚫Current IACT systems and CTA ⚫Simulation studies related to CTA, which I involved - Definition of the “gamma-ray sensitivity” (in CTA) ➢ Effect of uncertainty of hadronic interaction models on the estimated CTA sensitivity (proton) ➢Cosmic-ray heavy nuclei composition (Fe, Si….) 第三回 空気シャワー観測による宇宙線の起源探索勉強会, upload版 1 ⚫ Detect Cherenkov photons (in visible light wavelength) emitted by charged particles in the air showers by a large telescope ⚫ Lower energy threshold than air shower array (if the 500GeV γ observation altitude is same) ⚫ If the primary is gamma (or electron), Cherenkov photons make a symmetric pattern called “light pool” But we can’t observe under • The Sun ☀ • The (bright) moon ☽ • Clouds ☁ →typical duty cycle of Light pool, radius of 140m* ~10% (current systems) 2 *depends on the observation altitude 2 Arrival direction reconstruction in the focal plane ⚫ We require angular resolution of <0.1 degree (full angle) for optics and focal plane instrument (camera) ⚫ We can determine • Arrival direction Aharonian 2008 • Core location • energy • Gamma-ray likeness *In the current analysis By the image information in simple weighted mean of the camera the intersection point is not used. We partlyuse machine learning regression analysis. We can determine × To achieve <0.1 deg arrival direction and resolution for we need a fine core location optics → FOV is small Light pool, radius of ~140m* (typically ~10-3 str) 3 *depends on the observation altitude ⚫ Core location reconstruction gamma → Impact parameter of each Edge of the light pool telescope is known ⚫ Look-up-table (LUT) is prepared from MC gamma-ray events; we can extract “expected” p.e. -
Deep Learning for Energy Estimation and Particle Identification in Gamma-Ray Astronomy
Deep learning for energy estimation and particle identification in gamma-ray astronomy Evgeny Postnikov, Alexander Kryukov, Stanislav Polyakov, Dmitry Shipilov, Dmitriy Zhurov manually choose features and a classifier to sort images feature extraction and modeling steps are automatic Why using CNN • It’s a kind of ANN that uses a special architecture which is particularly well-adapted to classify images. • Today, deep CNN or some close variant are used in most neural networks for image recognition. • Feature extraction is automatic instead of manual choice (Hillas parameters). CNN background in other gamma-ray astronomy projects • VERITAS • H.E.S.S. • CTA – Schwarzschild-Couder Telescopes (medium telescopes) – Large-Sized Telescopes • Deep learning techniques (CNN) have previously been developed to select gamma-ray events in the TAIGA experiment A good quality of selection was achieved as compared with the conventional approach TAIGA telescope • TAIGA is an array of telescopes (currently only the 1st one installed) designed to detect the very high energy gamma-rays (>1x1012 eV) through their interaction with the Earth's atmosphere. The gamma-rays produce a shower of particles that travel through the atmosphere, emitting Cherenkov light which is then detected by our telescope (8.5 m2 mirror area) and projected onto the photomultiplier-based camera (560 photomultipliers 560 pixels of the image). TAIGA telescope Purpose of image analysis • Particle identification: – gamma ray VS – charged cosmic ray, mostly proton. The idea behind CNN • The idea of CNN is to behave in an invariant way across images. • Simple translation of the input image data instead of taking some preselected parameters of images (e.g. -

Performance of the VERITAS Experiment
Performance of the VERITAS experiment Nahee Park∗ for the VERITAS Collaboration† The University of Chicago E-mail: [email protected] VERITAS is a ground-based gamma-ray instrument operating at the Fred Lawrence Whipple Ob- servatory in southern Arizona. With an array of four imaging atmospheric Cherenkov telescopes (IACTs), VERITAS is designed to measure gamma rays with energies from ~ 85 GeV up to > 30 TeV. It has a sensitivity to detect a point source with a flux of 1% of the Crab Nebula flux within 25 hours. Since its first light observation in 2007, VERITAS has continued its successful mission for over seven years with two major upgrades: the relocation of telescope 1 in 2009 and a camera upgrade in 2012. We present the performance of VERITAS and how it has improved with these upgrades. The 34th International Cosmic Ray Conference, 30 July- 6 August, 2015 The Hague, The Netherlands ∗Speaker. † veritas.sao.arizona.edu Qc Copyright owned by the author(s) under the terms of the Creative Commons Attribution-NonCommercial-ShareAlike Licence. http://pos.sissa.it/ Performance of the VERITAS experiment Nahee Park 1. VERITAS operation and upgrades VERITAS (the Very Energetic Radiation Imaging Telescope Array System) is an array of four imaging atmospheric Cherenkov telescopes (IACTs) located at the Fred Lawrence Whipple Observatory in southern Arizona (30°40′N 110°57′W , 1268 m a.s.l.) [1]. It is designed to study astrophysical sources of gamma-ray emission in the energy range from ~ 85 GeV up to > 30 TeV by measuring the Cherenkov light generated by particle showers initiated by primary gamma rays in the atmosphere. -

The Background from Single Π0 Events in the IACT Observations
The background from single p0 events in the IACT observations Dorota Sobczynska´ ∗ University of Łód´z,Department of Astrophysics, Pomorska 149/153, 90-236 Łód´z,Poland E-mail: [email protected] Katarzyna Admaczyk University of Łód´z,Department of Astrophysics, Pomorska 149/153, 90-236 Łód´z,Poland E-mail: [email protected] A system of Imaging Air Cherenkov Telescopes (IACTs) can be triggered by hadronic events containing Cherenkov light from at most two electromagnetic subcascades, which are products of a single p0 decay. The recorded images of those showers have similar shapes to the primary g-ray events. Therefore, they are hardly reducible background for observations using IACTs. In this paper, the impact of the single p0 events on the efficiency of the g/hadron separation was studied using the Monte Carlo simulations. The fraction of events containing the light from the single p0 in the expected total protonic background depends on the trigger threshold, reflector area and altitude of the observatory. The calculated quality factors are anti-correlated with contributions of single p0 events in the proton initiated showers with primary energies below 200 GeV. The occurrence of the single p0 images is one of main reasons for the deterioration of the g/hadron separation efficiency at low energy. The 34th International Cosmic Ray Conference, 30 July- 6 August, 2015 The Hague, The Netherlands ∗Speaker. c Copyright owned by the author(s) under the terms of the Creative Commons Attribution-NonCommercial-ShareAlike Licence. http://pos.sissa.it/ The background from single p0 events in IACTs Dorota Sobczynska´ 1. -
Highlights from the Very High Energy and Cosmic Rays Session (Session 19) T
Highlights from the Very High Energy and Cosmic Rays session (session 19) T. Montaruli and E. Prandini U. of Geneva • 29 oral presentations • IACT experimental results and future • Neutrinos and Gamma rays • 3 posters • Cosmic Rays • New theoretical models 1 Some of the facilities • HESS Direct γ-detection • MAGIC FERMI • VERITAS • FACT IACT • CTA Wide Field of View, Continuous Operations HAWC ARGO Shower particle interception UHECR EAS Shower imaging Pierre Auger Observatory Precision Neutrino Telescopes ANTARES IceCube 2 Recent improvements of TeV instruments MAGIC II (Oscar Blanch Bigas) Sensitivity (50h): 0.7% Crab Eth = 25 GeV VERITAS (J. Quinn): Sensitivity (25 hrs) 1% Crab Eth = 85 GeV 3 At this conference we heard about the benefit of pushing the Eth down for improved instruments. The largest telescope: H.E.S.S. II in the time domain compared to Fermi H.E.S.S. Sensitivity 0.5-2% of Crab Nebula Flux for Galactic plane survey We are ready to transit into the CTA precision era: it will push sensitivity an order of magnitude down and will be unbeatable in the time domain! 4 New Instruments almost completed! • SiPM: new technology successfully applied to IACT cameras • Future telescopes (CTA) G. Hughes (FACT) will adopt this technology ASTRI (S. Lombardi) SST-1M (M. Heller) FACT GCT (J. Hinton) 5 HAWC first science! 2 sr instantaneous FoV 2/3 of the sky each day Tliltepetl, Sierra Negra 4582m (15,000 ft) HAWC Newer data 1/3 HAWC: after likelihood analysis 6 R. Lauer Great potential for extended sources: Geminga Cosmic ray anisotropies Gammas: Preliminary 1 Deg Search Size of the Moon 86 billion events, collected over 181 sidereal days with ~1/3 of the array Contributor to the Positron Fraction Large scale (>60°) removed Positron Excess? (dipole,quadrupole,octupole) 10° radial smearing and multipole subtraction of large scale anisotropy Yuksel, Kistler & Stanev, Texas Symposium, December 18, 2015 PRL.