NP-Completeness
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Time Complexity
Chapter 3 Time complexity Use of time complexity makes it easy to estimate the running time of a program. Performing an accurate calculation of a program’s operation time is a very labour-intensive process (it depends on the compiler and the type of computer or speed of the processor). Therefore, we will not make an accurate measurement; just a measurement of a certain order of magnitude. Complexity can be viewed as the maximum number of primitive operations that a program may execute. Regular operations are single additions, multiplications, assignments etc. We may leave some operations uncounted and concentrate on those that are performed the largest number of times. Such operations are referred to as dominant. The number of dominant operations depends on the specific input data. We usually want to know how the performance time depends on a particular aspect of the data. This is most frequently the data size, but it can also be the size of a square matrix or the value of some input variable. 3.1: Which is the dominant operation? 1 def dominant(n): 2 result = 0 3 fori in xrange(n): 4 result += 1 5 return result The operation in line 4 is dominant and will be executedn times. The complexity is described in Big-O notation: in this caseO(n)— linear complexity. The complexity specifies the order of magnitude within which the program will perform its operations. More precisely, in the case ofO(n), the program may performc n opera- · tions, wherec is a constant; however, it may not performn 2 operations, since this involves a different order of magnitude of data. -

Quick Sort Algorithm Song Qin Dept
Quick Sort Algorithm Song Qin Dept. of Computer Sciences Florida Institute of Technology Melbourne, FL 32901 ABSTRACT each iteration. Repeat this on the rest of the unsorted region Given an array with n elements, we want to rearrange them in without the first element. ascending order. In this paper, we introduce Quick Sort, a Bubble sort works as follows: keep passing through the list, divide-and-conquer algorithm to sort an N element array. We exchanging adjacent element, if the list is out of order; when no evaluate the O(NlogN) time complexity in best case and O(N2) exchanges are required on some pass, the list is sorted. in worst case theoretically. We also introduce a way to approach the best case. Merge sort [4]has a O(NlogN) time complexity. It divides the 1. INTRODUCTION array into two subarrays each with N/2 items. Conquer each Search engine relies on sorting algorithm very much. When you subarray by sorting it. Unless the array is sufficiently small(one search some key word online, the feedback information is element left), use recursion to do this. Combine the solutions to brought to you sorted by the importance of the web page. the subarrays by merging them into single sorted array. 2 Bubble, Selection and Insertion Sort, they all have an O(N2) In Bubble sort, Selection sort and Insertion sort, the O(N ) time time complexity that limits its usefulness to small number of complexity limits the performance when N gets very big. element no more than a few thousand data points. -

Complexity Theory Lecture 9 Co-NP Co-NP-Complete
Complexity Theory 1 Complexity Theory 2 co-NP Complexity Theory Lecture 9 As co-NP is the collection of complements of languages in NP, and P is closed under complementation, co-NP can also be characterised as the collection of languages of the form: ′ L = x y y <p( x ) R (x, y) { |∀ | | | | → } Anuj Dawar University of Cambridge Computer Laboratory NP – the collection of languages with succinct certificates of Easter Term 2010 membership. co-NP – the collection of languages with succinct certificates of http://www.cl.cam.ac.uk/teaching/0910/Complexity/ disqualification. Anuj Dawar May 14, 2010 Anuj Dawar May 14, 2010 Complexity Theory 3 Complexity Theory 4 NP co-NP co-NP-complete P VAL – the collection of Boolean expressions that are valid is co-NP-complete. Any language L that is the complement of an NP-complete language is co-NP-complete. Any of the situations is consistent with our present state of ¯ knowledge: Any reduction of a language L1 to L2 is also a reduction of L1–the complement of L1–to L¯2–the complement of L2. P = NP = co-NP • There is an easy reduction from the complement of SAT to VAL, P = NP co-NP = NP = co-NP • ∩ namely the map that takes an expression to its negation. P = NP co-NP = NP = co-NP • ∩ VAL P P = NP = co-NP ∈ ⇒ P = NP co-NP = NP = co-NP • ∩ VAL NP NP = co-NP ∈ ⇒ Anuj Dawar May 14, 2010 Anuj Dawar May 14, 2010 Complexity Theory 5 Complexity Theory 6 Prime Numbers Primality Consider the decision problem PRIME: Another way of putting this is that Composite is in NP. -

On the Randomness Complexity of Interactive Proofs and Statistical Zero-Knowledge Proofs*
On the Randomness Complexity of Interactive Proofs and Statistical Zero-Knowledge Proofs* Benny Applebaum† Eyal Golombek* Abstract We study the randomness complexity of interactive proofs and zero-knowledge proofs. In particular, we ask whether it is possible to reduce the randomness complexity, R, of the verifier to be comparable with the number of bits, CV , that the verifier sends during the interaction. We show that such randomness sparsification is possible in several settings. Specifically, unconditional sparsification can be obtained in the non-uniform setting (where the verifier is modelled as a circuit), and in the uniform setting where the parties have access to a (reusable) common-random-string (CRS). We further show that constant-round uniform protocols can be sparsified without a CRS under a plausible worst-case complexity-theoretic assumption that was used previously in the context of derandomization. All the above sparsification results preserve statistical-zero knowledge provided that this property holds against a cheating verifier. We further show that randomness sparsification can be applied to honest-verifier statistical zero-knowledge (HVSZK) proofs at the expense of increasing the communica- tion from the prover by R−F bits, or, in the case of honest-verifier perfect zero-knowledge (HVPZK) by slowing down the simulation by a factor of 2R−F . Here F is a new measure of accessible bit complexity of an HVZK proof system that ranges from 0 to R, where a maximal grade of R is achieved when zero- knowledge holds against a “semi-malicious” verifier that maliciously selects its random tape and then plays honestly. -

Dspace 6.X Documentation
DSpace 6.x Documentation DSpace 6.x Documentation Author: The DSpace Developer Team Date: 27 June 2018 URL: https://wiki.duraspace.org/display/DSDOC6x Page 1 of 924 DSpace 6.x Documentation Table of Contents 1 Introduction ___________________________________________________________________________ 7 1.1 Release Notes ____________________________________________________________________ 8 1.1.1 6.3 Release Notes ___________________________________________________________ 8 1.1.2 6.2 Release Notes __________________________________________________________ 11 1.1.3 6.1 Release Notes _________________________________________________________ 12 1.1.4 6.0 Release Notes __________________________________________________________ 14 1.2 Functional Overview _______________________________________________________________ 22 1.2.1 Online access to your digital assets ____________________________________________ 23 1.2.2 Metadata Management ______________________________________________________ 25 1.2.3 Licensing _________________________________________________________________ 27 1.2.4 Persistent URLs and Identifiers _______________________________________________ 28 1.2.5 Getting content into DSpace __________________________________________________ 30 1.2.6 Getting content out of DSpace ________________________________________________ 33 1.2.7 User Management __________________________________________________________ 35 1.2.8 Access Control ____________________________________________________________ 36 1.2.9 Usage Metrics _____________________________________________________________ -

The Complexity Zoo
The Complexity Zoo Scott Aaronson www.ScottAaronson.com LATEX Translation by Chris Bourke [email protected] 417 classes and counting 1 Contents 1 About This Document 3 2 Introductory Essay 4 2.1 Recommended Further Reading ......................... 4 2.2 Other Theory Compendia ............................ 5 2.3 Errors? ....................................... 5 3 Pronunciation Guide 6 4 Complexity Classes 10 5 Special Zoo Exhibit: Classes of Quantum States and Probability Distribu- tions 110 6 Acknowledgements 116 7 Bibliography 117 2 1 About This Document What is this? Well its a PDF version of the website www.ComplexityZoo.com typeset in LATEX using the complexity package. Well, what’s that? The original Complexity Zoo is a website created by Scott Aaronson which contains a (more or less) comprehensive list of Complexity Classes studied in the area of theoretical computer science known as Computa- tional Complexity. I took on the (mostly painless, thank god for regular expressions) task of translating the Zoo’s HTML code to LATEX for two reasons. First, as a regular Zoo patron, I thought, “what better way to honor such an endeavor than to spruce up the cages a bit and typeset them all in beautiful LATEX.” Second, I thought it would be a perfect project to develop complexity, a LATEX pack- age I’ve created that defines commands to typeset (almost) all of the complexity classes you’ll find here (along with some handy options that allow you to conveniently change the fonts with a single option parameters). To get the package, visit my own home page at http://www.cse.unl.edu/~cbourke/. -

A Probabilistic Anytime Algorithm for the Halting Problem
Computability 7 (2018) 259–271 259 DOI 10.3233/COM-170073 IOS Press A probabilistic anytime algorithm for the halting problem Cristian S. Calude Department of Computer Science, University of Auckland, Auckland, New Zealand [email protected] www.cs.auckland.ac.nz/~cristian Monica Dumitrescu Faculty of Mathematics and Computer Science, Bucharest University, Romania [email protected] http://goo.gl/txsqpU The first author dedicates his contribution to this paper to the memory of his collaborator and friend S. Barry Cooper (1943–2015). Abstract. TheHaltingProblem,the most (in)famous undecidableproblem,has important applications in theoretical andapplied computer scienceand beyond, hencethe interest in its approximate solutions. Experimental results reportedonvarious models of computationsuggest that haltingprogramsare not uniformly distributed– running times play an important role.A reason is thataprogram whicheventually stopsbut does not halt “quickly”, stops ata timewhich is algorithmically compressible. In this paperweworkwith running times to defineaclass of computable probability distributions on theset of haltingprograms in ordertoconstructananytimealgorithmfor theHaltingproblem withaprobabilisticevaluationofthe errorofthe decision. Keywords: HaltingProblem,anytimealgorithm, running timedistribution 1. Introduction The Halting Problem asks to decide, from a description of an arbitrary program and an input, whether the computation of the program on that input will eventually stop or continue forever. In 1936 Alonzo Church, and independently Alan Turing, proved that (in Turing’s formulation) an algorithm to solve the Halting Problem for all possible program-input pairs does not exist; two equivalent models have been used to describe computa- tion by algorithms (an informal notion), the lambda calculus by Church and Turing machines by Turing. The Halting Problem is historically the first proved undecidable problem; it has many applications in mathematics, logic and theoretical as well as applied computer science, mathematics, physics, biology, etc. -
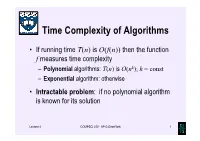
Time Complexity of Algorithms
Time Complexity of Algorithms • If running time T(n) is O(f(n)) then the function f measures time complexity – Polynomial algorithms: T(n) is O(nk); k = const – Exponential algorithm: otherwise • Intractable problem: if no polynomial algorithm is known for its solution Lecture 4 COMPSCI 220 - AP G Gimel'farb 1 Time complexity growth f(n) Number of data items processed per: 1 minute 1 day 1 year 1 century n 10 14,400 5.26⋅106 5.26⋅108 7 n log10n 10 3,997 883,895 6.72⋅10 n1.5 10 1,275 65,128 1.40⋅106 n2 10 379 7,252 72,522 n3 10 112 807 3,746 2n 10 20 29 35 Lecture 4 COMPSCI 220 - AP G Gimel'farb 2 Beware exponential complexity ☺If a linear O(n) algorithm processes 10 items per minute, then it can process 14,400 items per day, 5,260,000 items per year, and 526,000,000 items per century ☻If an exponential O(2n) algorithm processes 10 items per minute, then it can process only 20 items per day and 35 items per century... Lecture 4 COMPSCI 220 - AP G Gimel'farb 3 Big-Oh vs. Actual Running Time • Example 1: Let algorithms A and B have running times TA(n) = 20n ms and TB(n) = 0.1n log2n ms • In the “Big-Oh”sense, A is better than B… • But: on which data volume can A outperform B? TA(n) < TB(n) if 20n < 0.1n log2n, 200 60 or log2n > 200, that is, when n >2 ≈ 10 ! • Thus, in all practical cases B is better than A… Lecture 4 COMPSCI 220 - AP G Gimel'farb 4 Big-Oh vs. -

A Short History of Computational Complexity
The Computational Complexity Column by Lance FORTNOW NEC Laboratories America 4 Independence Way, Princeton, NJ 08540, USA [email protected] http://www.neci.nj.nec.com/homepages/fortnow/beatcs Every third year the Conference on Computational Complexity is held in Europe and this summer the University of Aarhus (Denmark) will host the meeting July 7-10. More details at the conference web page http://www.computationalcomplexity.org This month we present a historical view of computational complexity written by Steve Homer and myself. This is a preliminary version of a chapter to be included in an upcoming North-Holland Handbook of the History of Mathematical Logic edited by Dirk van Dalen, John Dawson and Aki Kanamori. A Short History of Computational Complexity Lance Fortnow1 Steve Homer2 NEC Research Institute Computer Science Department 4 Independence Way Boston University Princeton, NJ 08540 111 Cummington Street Boston, MA 02215 1 Introduction It all started with a machine. In 1936, Turing developed his theoretical com- putational model. He based his model on how he perceived mathematicians think. As digital computers were developed in the 40's and 50's, the Turing machine proved itself as the right theoretical model for computation. Quickly though we discovered that the basic Turing machine model fails to account for the amount of time or memory needed by a computer, a critical issue today but even more so in those early days of computing. The key idea to measure time and space as a function of the length of the input came in the early 1960's by Hartmanis and Stearns. -

On Unapproximable Versions of NP-Complete Problems By
SIAM J. COMPUT. () 1996 Society for Industrial and Applied Mathematics Vol. 25, No. 6, pp. 1293-1304, December 1996 O09 ON UNAPPROXIMABLE VERSIONS OF NP-COMPLETE PROBLEMS* DAVID ZUCKERMANt Abstract. We prove that all of Karp's 21 original NP-complete problems have a version that is hard to approximate. These versions are obtained from the original problems by adding essentially the same simple constraint. We further show that these problems are absurdly hard to approximate. In fact, no polynomial-time algorithm can even approximate log (k) of the magnitude of these problems to within any constant factor, where log (k) denotes the logarithm iterated k times, unless NP is recognized by slightly superpolynomial randomized machines. We use the same technique to improve the constant such that MAX CLIQUE is hard to approximate to within a factor of n. Finally, we show that it is even harder to approximate two counting problems: counting the number of satisfying assignments to a monotone 2SAT formula and computing the permanent of -1, 0, 1 matrices. Key words. NP-complete, unapproximable, randomized reduction, clique, counting problems, permanent, 2SAT AMS subject classifications. 68Q15, 68Q25, 68Q99 1. Introduction. 1.1. Previous work. The theory of NP-completeness was developed in order to explain why certain computational problems appeared intractable [10, 14, 12]. Yet certain optimization problems, such as MAX KNAPSACK, while being NP-complete to compute exactly, can be approximated very accurately. It is therefore vital to ascertain how difficult various optimization problems are to approximate. One problem that eluded attempts at accurate approximation is MAX CLIQUE. -

Self-Referential Basis of Undecidable Dynamics: from the Liar Paradox and the Halting Problem to the Edge of Chaos
Self-referential basis of undecidable dynamics: from The Liar Paradox and The Halting Problem to The Edge of Chaos Mikhail Prokopenko1, Michael Harre´1, Joseph Lizier1, Fabio Boschetti2, Pavlos Peppas3;4, Stuart Kauffman5 1Centre for Complex Systems, Faculty of Engineering and IT The University of Sydney, NSW 2006, Australia 2CSIRO Oceans and Atmosphere, Floreat, WA 6014, Australia 3Department of Business Administration, University of Patras, Patras 265 00, Greece 4University of Pennsylvania, Philadelphia, PA 19104, USA 5University of Pennsylvania, USA [email protected] Abstract In this paper we explore several fundamental relations between formal systems, algorithms, and dynamical sys- tems, focussing on the roles of undecidability, universality, diagonalization, and self-reference in each of these com- putational frameworks. Some of these interconnections are well-known, while some are clarified in this study as a result of a fine-grained comparison between recursive formal systems, Turing machines, and Cellular Automata (CAs). In particular, we elaborate on the diagonalization argument applied to distributed computation carried out by CAs, illustrating the key elements of Godel’s¨ proof for CAs. The comparative analysis emphasizes three factors which underlie the capacity to generate undecidable dynamics within the examined computational frameworks: (i) the program-data duality; (ii) the potential to access an infinite computational medium; and (iii) the ability to im- plement negation. The considered adaptations of Godel’s¨ proof distinguish between computational universality and undecidability, and show how the diagonalization argument exploits, on several levels, the self-referential basis of undecidability. 1 Introduction It is well-known that there are deep connections between dynamical systems, algorithms, and formal systems. -

Sorting Algorithm 1 Sorting Algorithm
Sorting algorithm 1 Sorting algorithm In computer science, a sorting algorithm is an algorithm that puts elements of a list in a certain order. The most-used orders are numerical order and lexicographical order. Efficient sorting is important for optimizing the use of other algorithms (such as search and merge algorithms) that require sorted lists to work correctly; it is also often useful for canonicalizing data and for producing human-readable output. More formally, the output must satisfy two conditions: 1. The output is in nondecreasing order (each element is no smaller than the previous element according to the desired total order); 2. The output is a permutation, or reordering, of the input. Since the dawn of computing, the sorting problem has attracted a great deal of research, perhaps due to the complexity of solving it efficiently despite its simple, familiar statement. For example, bubble sort was analyzed as early as 1956.[1] Although many consider it a solved problem, useful new sorting algorithms are still being invented (for example, library sort was first published in 2004). Sorting algorithms are prevalent in introductory computer science classes, where the abundance of algorithms for the problem provides a gentle introduction to a variety of core algorithm concepts, such as big O notation, divide and conquer algorithms, data structures, randomized algorithms, best, worst and average case analysis, time-space tradeoffs, and lower bounds. Classification Sorting algorithms used in computer science are often classified by: • Computational complexity (worst, average and best behaviour) of element comparisons in terms of the size of the list . For typical sorting algorithms good behavior is and bad behavior is .