Identification of Fishing Vessel Types and Analysis of Seasonal Activities
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

SUSTAINABLE FISHERIES and RESPONSIBLE AQUACULTURE: a Guide for USAID Staff and Partners
SUSTAINABLE FISHERIES AND RESPONSIBLE AQUACULTURE: A Guide for USAID Staff and Partners June 2013 ABOUT THIS GUIDE GOAL This guide provides basic information on how to design programs to reform capture fisheries (also referred to as “wild” fisheries) and aquaculture sectors to ensure sound and effective development, environmental sustainability, economic profitability, and social responsibility. To achieve these objectives, this document focuses on ways to reduce the threats to biodiversity and ecosystem productivity through improved governance and more integrated planning and management practices. In the face of food insecurity, global climate change, and increasing population pressures, it is imperative that development programs help to maintain ecosystem resilience and the multiple goods and services that ecosystems provide. Conserving biodiversity and ecosystem functions are central to maintaining ecosystem integrity, health, and productivity. The intent of the guide is not to suggest that fisheries and aquaculture are interchangeable: these sectors are unique although linked. The world cannot afford to neglect global fisheries and expect aquaculture to fill that void. Global food security will not be achievable without reversing the decline of fisheries, restoring fisheries productivity, and moving towards more environmentally friendly and responsible aquaculture. There is a need for reform in both fisheries and aquaculture to reduce their environmental and social impacts. USAID’s experience has shown that well-designed programs can reform capture fisheries management, reducing threats to biodiversity while leading to increased productivity, incomes, and livelihoods. Agency programs have focused on an ecosystem-based approach to management in conjunction with improved governance, secure tenure and access to resources, and the application of modern management practices. -

Arizona Fishing Regulations 3 Fishing License Fees Getting Started
2019 & 2020 Fishing Regulations for your boat for your boat See how much you could savegeico.com on boat | 1-800-865-4846insurance. | Local Offi ce geico.com | 1-800-865-4846 | Local Offi ce See how much you could save on boat insurance. Some discounts, coverages, payment plans and features are not available in all states or all GEICO companies. Boat and PWC coverages are underwritten by GEICO Marine Insurance Company. GEICO is a registered service mark of Government Employees Insurance Company, Washington, D.C. 20076; a Berkshire Hathaway Inc. subsidiary. TowBoatU.S. is the preferred towing service provider for GEICO Marine Insurance. The GEICO Gecko Image © 1999-2017. © 2017 GEICO AdPages2019.indd 2 12/4/2018 1:14:48 PM AdPages2019.indd 3 12/4/2018 1:17:19 PM Table of Contents Getting Started License Information and Fees ..........................................3 Douglas A. Ducey Governor Regulation Changes ...........................................................4 ARIZONA GAME AND FISH COMMISSION How to Use This Booklet ...................................................5 JAMES S. ZIELER, CHAIR — St. Johns ERIC S. SPARKS — Tucson General Statewide Fishing Regulations KURT R. DAVIS — Phoenix LELAND S. “BILL” BRAKE — Elgin Bag and Possession Limits ................................................6 JAMES R. AMMONS — Yuma Statewide Fishing Regulations ..........................................7 ARIZONA GAME AND FISH DEPARTMENT Common Violations ...........................................................8 5000 W. Carefree Highway Live Baitfish -

Fish & Fishing Session Outline
Fish & Fishing Session Outline For the Outdoor Skills Program th th 7 & 8 Grade Lessons I. Welcome students and ask group what they remember or learned in the last session. II. Fish & Fishing Lessons A. Activity: Attract a Fish B. Activity: Lures and Knot Tying C. Activity: Tackle Box and Fishing Plan III. Review: Ask the students what they enjoyed most about today’s session and what they enjoyed the least. (Another way to ask is “what was your high today, and what was your low? As the weeks progress this can be called “Time for Highs & Lows”.) The Outdoor Skills program is a partnership with Nebraska Games & Parks and the UNL Extension/4-H Youth Development Program to provide hands-on lessons for youth during their afterschool time and school days off. It provides the opportunity to master skills in the areas of hunting, fishing, and exploring the outdoors. This educational program is part of the 20 year plan to recruit, develop and retain hunters, anglers, and outdoor enthusiasts in Nebraska. Inventory Activity: Fishing Lures Curriculum Level: 7-8 Kit Materials & Equipment Feathers Waterproof glue Fish anatomy poster Pliers Fish models (catfish, bluegill, crappie, Tackle box with “filling your tackle & bass) box” components ID/habitat cards Laminated copy of “Awesome Lures” Lures displays Cabela’s Fishing Catalog Supplies Instructor Provides (15) Nebraska Fishing Guide Paperclips (15) NGPC Fish ID Book Pop cans Trilene line Scissors Knot tying cards Masking tape Knot tying kit (6 shark hooks & 6 lengths of rope) Copies of “Plan Your Trip” worksheet (15) Knot-testing weights Treble hooks Duct tape Materials to be Restocked-After Each Use (15) Nebraska Fishing Guide (15) NGPC Fish ID Book For information on restocking items contact Julia Plugge at 402-471-6009 or [email protected] All orders must be placed at least 2 weeks in advance. -

101 Fishing Tips by Capt
101 Fishing Tips By Capt. Lawrence Piper www.TheAnglersMark.com [email protected] 904-557 -1027 Table of Contents Tackle and Angling Page 2 Fish and Fishing Page 5 Fishing Spots Page 13 Trailering and Boating Page 14 General Page 15 1 Amelia Island Back Country Light Tackle Fishing Tips Tackle and Angling 1) I tell my guests who want to learn to fish the back waters “learn your knots”! You don’t have to know a whole bunch but be confident in the ones you’re going to use and know how to tie them good and fast so you can bet back to fishing after you’ve broken off. 2) When fishing with soft plastics keep a tube of Super Glue handy in your tackle box. When you rig the grub on to your jig, place a drop of the glue below the head and then finish pushing the grub up. This will secure the grub better to the jig and help make it last longer. 3) Many anglers get excited when they hook up with big fish. When fishing light tackle, check your drag so that it’s not too tight and the line can pull out. When you hookup, the key is to just keep the pressure on the fish. If you feel any slack, REEL! When the fish is pulling away from you, use the rod and the rod tip action to tire the fish. Slowly work the fish in, lifting up, reeling down. Keep that pressure on! 4) Net a caught fish headfirst. Get the net down in the water and have the angler work the fish towards you and as it tires, bring the fish headfirst into the net. -
SOLUTION: Gathering and Sonic Blasts for Oil Exploration Because These Practices Can Harm and Kill Whales
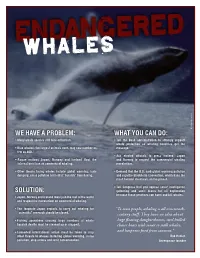
ENDANGEREDWHALES © Nolan/Greenpeace WE HAVE A PROBLEM: WHAT YOU CAN DO: • Many whale species still face extinction. • Tell the Bush administration to strongly support whale protection so whaling countries get the • Blue whales, the largest animals ever, may now number as message. few as 400.1 • Ask elected officials to press Iceland, Japan • Rogue nations Japan, Norway and Iceland flout the and Norway to respect the commercial whaling international ban on commercial whaling. moratorium. • Other threats facing whales include global warming, toxic • Demand that the U.S. curb global warming pollution dumping, noise pollution and lethal “bycatch” from fishing. and sign the Stockholm Convention, which bans the most harmful chemicals on the planet. • Tell Congress that you oppose sonar intelligence SOLUTION: gathering and sonic blasts for oil exploration because these practices can harm and kill whales. • Japan, Norway and Iceland must join the rest of the world and respect the moratorium on commercial whaling. • The loophole Japan exploits to carry out whaling for “Tomostpeople,whalingisallnineteenth- “scientific” research should be closed. centurystuff.Theyhavenoideaabout • Fishing operations causing large numbers of whale hugefloatingslaughterhouses,steel-hulled bycatch deaths must be cleaned up or stopped. chaserboatswithsonartostalkwhales, • Concerted international action must be taken to stop andharpoonsfiredfromcannons.” other threats to whales including global warming, noise Bob Hunter, pollution, ship strikes and toxic contamination. -

Commercial Fishing Guide
1981 Commercial Fishing Guide Includes: STOCK EXPECTATIONS and PROPOSED FISHING PLANS Government Gouvernement I+ of Canada du Canada Fisheries Pech es and Oceans et Oceans LIBRARY PACIFIC BIULUG!CAL STATION ADDENDUM 1981 Commercial Fishing Guide - Page 28 Two-Area Troll Licensing - clarification Fishermen electing for an inside licence will receive an inside trolling privilege only and will not be eligible to participate in any other salmon fishery on the coast. Fishermen electing for an outside licence may participate in any troll or net fishery on the coast except the troll fishery in the Strait of Georgia. , ....... c l l r t 1981 Commercial Fishing Guide Department of Fisheries and Oceans Pacific Region 1090 West Pender Street Vancouver, B.C. Government Gouvernement I+ of Canada du Canada Fisheries Pee hes and Oceans et Oceans \ ' Editor: Brenda Austin Management Plans Coordinator: Hank Scarth Cover: Bev Bowler Canada Joe Kambeitz 1981 Calendar JANUARY FEBRUARY MARCH s M T w T F s s M T w T F s s M T w T F s 2 3 2 3 4 5 6 7 1 2 3 4 5 6 7 4 5 6 7 8 9 10 8 9 10 11 12 13 14 8 9 10 11 12 13 14 1-1 12 13 14 15 16 17 15 16 17 18 19 20 21 15 -16 17 18 19 20 21 18 19 20 21 22 23 24 22 23 24 25 26 27 28 ?2 23 _24 25 26 27 28 25 26 27 28 29 30 31 29 30 31 APRIL MAY JUNE s M T w T F s s M T w T F s s M T w T F s 1 2 3 4 1 2 2 3 4 5 6 5 6 7 8 9 10 11 3 4 5 6 7 8 9 7 8 9 10 11 12 13 12 13 14 15 16 17 18 10 11 12 13 14 15 16 14 15 16 17 18 19 20 19 20 21 22 23 24 25 17 18 19 20 21 22 23 21 22 23 24 25 26 27 26 27 28 29 30 24 25 26 27 28 29 30 28 -

Ger-Line® Germany
GER-LINE GERMANY Featuring the finest ➢ monofilament, Founded in 2008, ➢ fluorocarbon, GER-LINE is providing ➢ braided fishing lines world’s best range of fishing lines ➢ A passion for quality ➢ An eye for precision engineering 100% Made in Germany Passion for Quality Focus on Customer Success Constant Innovative Passion for Fishing Sport GROW TOGETHER WITH OUR CUSTOMERS PRIMARY CUSTOMERS GROWING MARKETS Fishing tackle & line distributors, Within both emerging and wholesalers and brand developed markets including South manufacturers, both within Europe Africa, South America, the US, and across international markets. Australia, China, and Russia. Frank Hennig is the inspiring entrepreneur In parallel managing the wholesale and who founded GER-LINE. With over 35 distribution of his own range of products. years of fishing experience. Graduated from Fachhochschule Lübeck The very beginnings of his fishing tackle (University of Applied Science) with a business with more than 1,000 square double degree in both Economics and meter, fishing tackle shop. Engineering which further helps him and his partners achieve sustainable growth. Frank Hennig is a man that values premium quality into the very core of GER-LINE. FLUOROCARBON One of the World’s Best Fluorocarbon Outstanding Durability Strong Quality Assurance System State of the Art Production Superior Raw Material Exceptional Value for Money GREAT FEATURES ➢ Crystal clear 100% fluorocarbon ➢ Nearly virtually invisible in water ➢ Superior tensile and knot strength ➢ Exceptional abrasion resistance -

Ecosystem Effects of Fishing and Whaling in the North Pacific And
TWENTY-SIX Ecosystem Effects of Fishing and Whaling in the North Pacific and Atlantic Oceans BORIS WORM, HEIKE K. LOTZE, RANSOM A. MYERS Human alterations of marine ecosystems have occurred about the role of whales in the food web and (2) what has throughout history, but only over the last century have these been observed in other species playing a similar role. Then we reached global proportions. Three major types of changes may explore whether the available evidence supports these have been described: (1) the changing of nutrient cycles and hypotheses. Experiments and detailed observations in lakes, climate, which may affect ecosystem structure from the bot- streams, and coastal and shelf ecosystems have shown that tom up, (2) fishing, which may affect ecosystems from the the removal of large predatory fishes or marine mammals top down, and (3) habitat alteration and pollution, which almost always causes release of prey populations, which often affect all trophic levels and therefore were recently termed set off ecological chain reactions such as trophic cascades side-in impacts (Lotze and Milewski 2004). Although the (Estes and Duggins 1995; Micheli 1999; Pace et al. 1999; large-scale consequences of these changes for marine food Shurin et al. 2002; Worm and Myers 2003). Another impor- webs and ecosystems are only beginning to be understood tant interaction is competitive release, in which formerly (Pauly et al. 1998; Micheli 1999; Jackson et al. 2001; suppressed species replace formerly dominant ones that were Beaugrand et al. 2002; Worm et al. 2002; Worm and Myers reduced by fishing (Fogarty and Murawski 1998; Myers and 2003; Lotze and Milewski 2004), the implications for man- Worm 2003). -

Should I Eat the Fish I Catch?
EPA 823-F-14-002 For More Information October 2014 Introduction What can I do to reduce my health risks from eating fish containing chemical For more information about reducing your Fish are an important part of a healthy diet. pollutants? health risks from eating fish that contain chemi- Office of Science and Technology (4305T) They are a lean, low-calorie source of protein. cal pollutants, contact your local or state health Some sport fish caught in the nation’s lakes, Following these steps can reduce your health or environmental protection department. You rivers, oceans, and estuaries, however, may risks from eating fish containing chemical can find links to state fish advisory programs Should I Eat the contain chemicals that could pose health risks if pollutants. The rest of the brochure explains and your state’s fish advisory program contact these fish are eaten in large amounts. these recommendations in more detail. on the National Fish Advisory Program website Fish I Catch? at: http://water.epa.gov/scitech/swguidance/fish- The purpose of this brochure is not to 1. Look for warning signs or call your shellfish/fishadvisories/index.cfm. discourage you from eating fish. It is intended local or state environmental health as a guide to help you select and prepare fish department. Contact them before you You may also contact: that are low in chemical pollutants. By following fish to see if any advisories are posted in these recommendations, you and your family areas where you want to fish. U.S. Environmental Protection Agency can continue to enjoy the benefits of eating fish. -

Shrimp Farming in the Asia-Pacific: Environmental and Trade Issues and Regional Cooperation
Shrimp Farming in the Asia-Pacific: Environmental and Trade Issues and Regional Cooperation Recommended Citation J. Honculada Primavera, "Shrimp Farming in the Asia-Pacific: Environmental and Trade Issues and Regional Cooperation", trade and environment, September 25, 1994, https://nautilus.org/trade-an- -environment/shrimp-farming-in-the-asia-pacific-environmental-and-trade-issues-- nd-regional-cooperation-4/ J. Honculada Primavera Aquaculture Department Southeast Asian Fisheries Development Center Tigbauan, Iloilo, Philippines 5021 Tel 63-33-271009 Fax 63-33-271008 Presented at the Nautilus Institute Workshop on Trade and Environment in Asia-Pacific: Prospects for Regional Cooperation 23-25 September 1994 East-West Center, Honolulu Abstract Production of farmed shrimp has grown at the phenomenal rate of 20-30% per year in the last two decades. The leading shrimp producers are in the Asia-Pacific region while the major markets are in Japan, the U.S.A. and Europe. The dramatic failures of shrimp farms in Taiwan, Thailand, Indonesia and China within the last five years have raised concerns about the sustainability of shrimp aquaculture, in particular intensive farming. After a brief background on shrimp farming, this paper reviews its environmental impacts and recommends measures that can be undertaken on the farm, 1 country and regional levels to promote long-term sustainability of the industry. Among the environmental effects of shrimp culture are the loss of mangrove goods and services as a result of conversion, salinization of soil and water, discharge of effluents resulting in pollution of the pond system itself and receiving waters, and overuse or misuse of chemicals. Recommendations include the protection and restoration of mangrove habitats and wild shrimp stocks, management of pond effluents, regulation of chemical use and species introductions, and an integrated coastal area management approach. -

Fishing License Report
Ministry of Fisheries, Marine Resources and Agriculture Male' Maldives LICENSED FISHING VESSEL LIST 13TH FEBRUARY 2020 S NO LICENSE NO ISSUED DATE EXPIRY DATE VESSEL NAME REG NO VESSEL TYPE 1 F20190297 15-04-2019 14-04-2020 AAGIRI P4931B-01-07-A PL/HL VESSELS 2 F20200112 23-01-2020 22-01-2021 AAHIYA P1691A-01-08-O PL/HL VESSELS 3 F20190272 04-04-2019 03-04-2020 AAILAA P8690A-01-04-M PL/HL VESSELS 4 F20200058 13-01-2020 12-01-2021 AAILAA P8878A-01-08-M PL/HL VESSELS 5 F20200165 03-02-2020 02-02-2021 AAILAA P1680A-01-10-T PL/HL VESSELS 6 F20190218 03-03-2019 02-03-2020 AAKURI P2445A-01-10-T PL/HL VESSELS 7 F20190313 22-04-2019 21-04-2020 AAROADHI P6899B-01-07-A PL/HL VESSELS 8 F20190414 15-07-2019 14-07-2020 AARU P8027A-01-04-L PL/HL VESSELS 9 F20200017 05-01-2020 04-01-2021 AARU 3 P9143A-01-07-A PL/HL VESSELS 10 F20200095 21-01-2020 20-01-2021 AARU 3 P8928A-01-07-A PL/HL VESSELS 11 F20190655 24-12-2019 23-12-2020 AASHAAN P7473A-01-06-S PL/HL VESSELS 12 F20190418 17-07-2019 16-07-2020 ABAARANA P4995B-01-07-A PL/HL VESSELS 13 F20190236 18-03-2019 17-03-2020 ADDANA 4 P3125B-01-07-A PL/HL VESSELS 14 F20200110 13-01-2020 12-01-2021 ADHUREAN P9160A-01-11-C PL/HL VESSELS 15 F20190650 24-12-2019 23-12-2020 AH NASRU P8078A-01-01-M PL/HL VESSELS 16 F20200072 11-01-2020 10-01-2021 AHDANA P7009A-01-07-A PL/HL VESSELS 17 F20190306 18-04-2019 17-04-2020 AILA C1279B-01-10-T PL/HL VESSELS 18 F20190553 15-10-2019 14-10-2020 AILAA 3 P5855B-01-17-B PL/HL VESSELS 19 F20190229 14-03-2019 13-03-2020 AILAA-2 P3554B-01-17-B PL/HL VESSELS 20 F20200113 05-02-2020 -

To Use America's Best Fishermen to Design the World's Best Fishing
SPRO To use America’s best fishermen to design the world’s best fishing tackle. Leading the way in technology and innovation. 2 SPRO 2008-2009 Fishing Gear www.SPRO.com SPRO 2008-2009 Fishing Gear 3 Bill Siemantel Signature Series • SPRO Swimbait BBZ-1 Shad Blue Back Herring Swimbait BBZ-1 Shad: The Bill Siemantel Signature BBZ-1 Shad is the most realistic swimbait on the market today. The BBZ-1 Shad will be available in a floating, a slowing sinking, and a fast sinking swimbait. The BBZ-1 Shad has the best action, best colors, and best quality of any other swimbait on the market today. All Baits Feature 1. The world’s sharpest hooks. Gamakatsu #2, Sexy Lavender Shad 2x strong treble hook. 2. Super durable fin and tail section. 3. Counter balanced pin segments that make the lures look alive. 4. The most realistic swimming action of any lure period. You simply cannot tell it is not a real fish. 5. Incredible lifelike finishes. Swimbait BBZ-1 Shad: Floating Color Stock No. Blue Back Herring SSB40Z1FBH Dirty Shad SSB40Z1FCS Sexy Lavender Shad SSB40Z1FSL Natural Shad SSB40Z1FNS Swimbait BBZ-1 Shad: Slow Sink Color Stock No. Blue Back Herring SSB40Z1SBH Dirty Shad SSB40Z1SCS Sexy Lavender Shad SSB40Z1SSL Natural Shad SSB40Z1SNS Swimbait BBZ-1 Shad: Fast Sink Color Stock No. Blue Back Herring SSB40Z1ABH Natural Shad Dirty Shad SSB40Z1ACS Sexy Lavender Shad SSB40Z1ASL Natural Shad SSB40Z1ANS 2 SPRO 2008-2009 Fishing Gear www.SPRO.com Made with hooks SPRO 2008-2009 Fishing Gear 3 SPRO • Mike McClelland Signature Series Mc Stick Mc Stick Chrome Shad Table Rock Shad Clear Chartreuse Old Glory Clown Mc Stick: (Weight 1/2 oz., Size 110mm) The Mike McClelland Signature Series Mc Stick jerk- Spooky Shad bait is designed for the tournament angler.