A .NET-Based Cross-Platform Software for Desktop Grids Alireza Poshtkohi
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Opening Presentation
Mono Meeting. Miguel de Icaza [email protected] October 24, 2006 Mono, Novell and the Community. Mono would not exist without the community: • Individual contributors. • Companies using Mono. • Organizations using Mono. • Companies using parts of Mono. • Google Summer of Code. Introductions. 2 Goals of the Meeting. A chance to meet. • Most of the Novell/Mono team is here. • Many contributors are here. • Various breaks to talk. Talk to others! • Introduce yourself, ask questions. Talk to us! • Frank Rego, Mono's Product Manager is here. • Tell us what you need in Mono. • Tell us about how you use Mono. 3 Project Status Goals Originally: • Improve our development platform on Linux. As the community grew: • Expand to support Microsoft APIs. As Mono got more complete: • Provide a complete cross platform runtime. • Allow Windows developers to port to Linux. 5 Mono Stacks and Goals. MySMQySQLL//PPosstgtrgesrsess EvEovolluutitioonn# # ASP.NET Novell APIs: MMoozzillala Novell iFolder iFolder, LDAP, Identity ADO.NET ApAapchachee MMonoono DesktoGpTK#: GTK# OpNoevenlOl LfDfAiPce GCneomceil# Windows.Forms JavaJa vCa oCommpaatitbilbitiylity Google APIs Microsoft Compatibility Libraries Mono Libraries Mono Runtime (Implementation of ECMA #335) 6 Platforms, CIL, Code Generation. 7 API space Mono 1.0: July 2004 “T-Bone” Mono 1.2: November 2006 “Rump steak” Mono 1.2 bits. Reliability and C# 2.0, .NET 2.0 scalability: • Complete. • With VM support. • ZenWorks and iFolder • Some 2.0 API support. pushed Mono on the server. • IronPython works. • xsp 1.0: 8 request/second. • xsp 1.2: 250 Debugger: request/second. • x86 and x86-64 debugger. GUI • CLI-only, limited in scenarios (no xsp). -
Domain-Specific Programming Systems
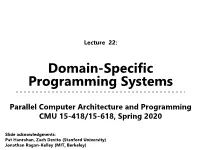
Lecture 22: Domain-Specific Programming Systems Parallel Computer Architecture and Programming CMU 15-418/15-618, Spring 2020 Slide acknowledgments: Pat Hanrahan, Zach Devito (Stanford University) Jonathan Ragan-Kelley (MIT, Berkeley) Course themes: Designing computer systems that scale (running faster given more resources) Designing computer systems that are efficient (running faster under constraints on resources) Techniques discussed: Exploiting parallelism in applications Exploiting locality in applications Leveraging hardware specialization (earlier lecture) CMU 15-418/618, Spring 2020 Claim: most software uses modern hardware resources inefficiently ▪ Consider a piece of sequential C code - Call the performance of this code our “baseline performance” ▪ Well-written sequential C code: ~ 5-10x faster ▪ Assembly language program: maybe another small constant factor faster ▪ Java, Python, PHP, etc. ?? Credit: Pat Hanrahan CMU 15-418/618, Spring 2020 Code performance: relative to C (single core) GCC -O3 (no manual vector optimizations) 51 40/57/53 47 44/114x 40 = NBody 35 = Mandlebrot = Tree Alloc/Delloc 30 = Power method (compute eigenvalue) 25 20 15 10 5 Slowdown (Compared to C++) Slowdown (Compared no data no 0 data no Java Scala C# Haskell Go Javascript Lua PHP Python 3 Ruby (Mono) (V8) (JRuby) Data from: The Computer Language Benchmarks Game: CMU 15-418/618, http://shootout.alioth.debian.org Spring 2020 Even good C code is inefficient Recall Assignment 1’s Mandelbrot program Consider execution on a high-end laptop: quad-core, Intel Core i7, AVX instructions... Single core, with AVX vector instructions: 5.8x speedup over C implementation Multi-core + hyper-threading + AVX instructions: 21.7x speedup Conclusion: basic C implementation compiled with -O3 leaves a lot of performance on the table CMU 15-418/618, Spring 2020 Making efficient use of modern machines is challenging (proof by assignments 2, 3, and 4) In our assignments, you only programmed homogeneous parallel computers. -

Job Peer Group Controller Job Peer Group Host a PG for Each Job
Korea-Japan Grid Symposium, Seoul December 1-2, 2004 P3: Personal Power Plant Makes over your PCs into power generator on the Grid Kazuyuki Shudo <[email protected]>, Yoshio Tanaka, Satoshi Sekiguchi Grid Technology Research Center, AIST, Japan P3: Personal Power Plant Middleware for distributed computation utilizing JXTA. Traditional goals Cycle scavenging Harvest compute power of existing PCs in an organization. Conventional dist. computing Internet-wide distributed computing E.g. distributed.net, SETI@home Challenging goals Aggregate PCs and expose them as an integrated Grid resource. Integrate P3 with Grid middleware ? cf. Community Scheduler Framework Dealings and circulation of computational resources Transfer individual resources (C2C, C2B) and also aggregated resources (B2B). Transfer and aggregation of Other resources than processing power. individual resources Commercial dealings need a market and a system supporting it. P2P way of interaction between PCs P3 uses JXTA for all communications JXTA is a widely accepted P2P protocol, project and library, that provides common functions P2P software requires. P2P concepts supported by JXTA efficiently support P3: Ad-hoc self-organization PCs can discover and communicate with each other without pre-configuration. Discovery PCs dynamically discover each other and jobs without a central server. Peer Group PCs are grouped into job groups, in which PCs carry out code distribution, job control, and collective communication for parallel computation. Overlay Network Peer ID in JXTA is independent from physical IDs like IP addresses and MAC addresses. JXTA enables end-to-end bidirectional communication over NA(P)T and firewall (even if the FW allows only unidirectional HTTP). This function supports parallel processing in the message-passing model, not only master-worker model. -
Web Services and PC Grid
Web Services and PC Grid ONG Guan Sin <[email protected]> Grid Evangelist Singapore Computer Systems Ltd APBioNet/APAN 18 Jul 2006 Tera-scale Campus Grid @ NUS LATEST: CIO Award 2006 winner Harnessing existing computation capacity campus-wide, creating large-scale supercomputing capability Computers are aggregated through its gigabit network into a virtual supercomputing platform using United Devices Grid MP middleware Community grid by voluntary participation from depts Two-year collaboration project between NUS and SCS to develop applications and support community Number of Nodes Theoretical# Practical^ 1,042 (Sep 20, 2005) 4.5 TFlops 2.5 TFlops 3,000 (Planned - 2007) 13 TFlops 7.2 TFlops * Accumulated average CPU speed of 2.456GHz as at Sep 20, 2005 # Assuming 90% capacity effectively harnessed ^ Assuming 50% capacity effectively harnessed Copyright 2006 Singapore Computer Systems Limited 2 UD Grid MP Architecture Managed Grid Services Interface (MGSI) ± Web Services API 3 Command-line Interface Application Service 4 Simple Web Interface 5 Application Service Overview Application Service . Is a job submission and result retrieval program which provides users with a simple interface for performing work on the Grid . It is responsible for Splitting and Merging Application Data Features . Control the Grid MP Sever with SOAP or XML-RPC communications . SOAP and XML-RPC Communications are protected with SSL encryption . SOAP and XML-RPC are language and platform independent with many publicly available toolkits and libraries. User interface can be command-line, web-based, GUI, etc. Can be written to run on various operating systems MP Grid Services Interface (MGSI) . All Objects in the Grid MP platform can be controlled through the MGSI . -

Good Practice Guide No. 17 Distributed Computing for Metrology
NPL REPORT DEM-ES 006 Software Support for Metrology - Good Practice Guide No. 17 Distributed computing for metrology applications T J Esward, N J McCormick, K M Lawrence and M J Stevens NOT RESTRICTED March 2007 National Physical Laboratory | Hampton Road | Teddington | Middlesex | United Kingdom | TW11 0LW Switchboard 020 8977 3222 | NPL Helpline 020 8943 6880 | Fax 020 8943 6458 | www.npl.co.uk Software Support for Metrology Good Practice Guide No. 17 Distributed computing for metrology applications T J Esward, N J McCormick, K M Lawrence and M J Stevens Mathematics and Scientific Computing Group March 2007 ABSTRACT This guide aims to facilitate the effective use of distributed computing methods and techniques by other National Measurement System (NMS) programmes and by metrologists in general. It focuses on the needs of those developing applications for distributed computing systems, and on PC desktop grids in particular, and seeks to ensure that application developers are given enough knowledge of system issues to be able to appreciate what is needed for the optimum performance of their own applications. Within metrology, the use of more comprehensive and realistic mathematical models that require extensive computing resources for their solution is increasing. The motivation for the guide is that in several areas of metrology the computational requirements of such models are so demanding that there is a strong requirement for distributed processing using parallel computing on PC networks. Those who need to use such technology can benefit from guidance on how best to structure the models and software to allow the effective use of distributed computing. -

Print This Article
L{{b b Volume 1, No. 3, Sept-Oct 2010 International Journal of Advanced Research in Computer Science RESEARCH PAPER Available Online at www.ijarcs.info A Simplified Network manager for Grid and Presenting the Grid as a Computation Providing Cloud M.Sudha* M.Monica Assistant Professor (Senior) Assistant Professor, School of Information Technology and Engineering, VIT School of Computer Science and Engineering, University INDIA VIT University INDIA [email protected] [email protected] Abstract: One of the common forms of distributed computing is grid computing. A grid uses the resources of many separate computers, loosely connected by a network, to solve large-scale computation problems. Our approach was as follows first computationally large data is split into a number of smaller, more manageable, working units secondly each work-unit is then sent to one member of the grid ,That member completes processing of that work-unit in its own and sends back the result. In this architecture, there needs to be at least one host that performs the task of assigning work-units, and then sending them, to a remote processor, as well as receive the results from remote processors. We call this unit as the Network Manager. In addition to this assigning, sending and receiving the work-units and results, there also is the need for a host that splits tasks into work-units and assimilates the received work units. We call this unit as the Task Broker, which we propose to design. On the server end, there is a program for processing module, splitter and assimilator (broker). -

Metadefender Core V4.13.1
MetaDefender Core v4.13.1 © 2018 OPSWAT, Inc. All rights reserved. OPSWAT®, MetadefenderTM and the OPSWAT logo are trademarks of OPSWAT, Inc. All other trademarks, trade names, service marks, service names, and images mentioned and/or used herein belong to their respective owners. Table of Contents About This Guide 13 Key Features of Metadefender Core 14 1. Quick Start with Metadefender Core 15 1.1. Installation 15 Operating system invariant initial steps 15 Basic setup 16 1.1.1. Configuration wizard 16 1.2. License Activation 21 1.3. Scan Files with Metadefender Core 21 2. Installing or Upgrading Metadefender Core 22 2.1. Recommended System Requirements 22 System Requirements For Server 22 Browser Requirements for the Metadefender Core Management Console 24 2.2. Installing Metadefender 25 Installation 25 Installation notes 25 2.2.1. Installing Metadefender Core using command line 26 2.2.2. Installing Metadefender Core using the Install Wizard 27 2.3. Upgrading MetaDefender Core 27 Upgrading from MetaDefender Core 3.x 27 Upgrading from MetaDefender Core 4.x 28 2.4. Metadefender Core Licensing 28 2.4.1. Activating Metadefender Licenses 28 2.4.2. Checking Your Metadefender Core License 35 2.5. Performance and Load Estimation 36 What to know before reading the results: Some factors that affect performance 36 How test results are calculated 37 Test Reports 37 Performance Report - Multi-Scanning On Linux 37 Performance Report - Multi-Scanning On Windows 41 2.6. Special installation options 46 Use RAMDISK for the tempdirectory 46 3. Configuring Metadefender Core 50 3.1. Management Console 50 3.2. -

Eagle: Tcl Implementation in C
Eagle: Tcl Implementation in C# Joe Mistachkin <[email protected]> 1. Abstract Eagle [1], Extensible Adaptable Generalized Logic Engine, is an implementation of the Tcl [2] scripting language for the Microsoft Common Language Runtime (CLR) [3]. It is designed to be a universal scripting solution for any CLR based language, and is written completely in C# [4]. Su- perficially, it is similar to Jacl [5], but it was written from scratch based on the design and imple- mentation of Tcl 8.4 [6]. It provides most of the functionality of the Tcl 8.4 interpreter while bor- rowing selected features from Tcl 8.5 [7] and the upcoming Tcl 8.6 [8] in addition to adding en- tirely new features. This paper explains how Eagle adds value to both Tcl/Tk and CLR-based applications and how it differs from other “dynamic languages” hosted by the CLR and its cousin, the Microsoft Dy- namic Language Runtime (DLR) [9]. It then describes how to use, integrate with, and extend Ea- gle effectively. It also covers some important implementation details and the overall design phi- losophy behind them. 2. Introduction This paper presents Eagle, which is an open-source [10] implementation of Tcl for the Microsoft CLR written entirely in C#. The goal of this project was to create a dynamic scripting language that could be used to automate any host application running on the CLR. 3. Rationale and Motivation Tcl makes it relatively easy to script applications written in C [11] and/or C++ [12] and so can also script applications written in many other languages (e.g. -

Starting up an Application Domain
04_596985 ch01.qxp 12/14/05 7:46 PM Page 1 Initial Phases of a Web Request Before the first line of code you write for an .aspx page executes, both Internet Information Services (IIS) and ASP.NET have performed a fair amount of logic to establish the execution context for a HyperText Transfer Protocol (HTTP) request. IIS may have negotiated security credentials with your browser. IIS will have determined that ASP.NET should process the request and will perform a hand- off of the request to ASP.NET. At that point, ASP.NET performs various one-time initializations as well as per-request initializations. This chapter will describe the initial phases of a Web request and will drill into the various security operations that occur during these phases. In this chapter, you will learn about the following steps that IIS carries out for a request: ❑ The initial request handling and processing performed both by the operating system layer and the ASP.NET Internet Server Application Programming Interface (ISAPI) filter ❑ How IIS handles static content requests versus dynamic ASP.NET content requests ❑ How the ASP.NET ISAPI filter transitions the request from the world of IIS into the ASP.NET world Having an understandingCOPYRIGHTED of the more granular portions MATERIAL of request processing also sets the stage for future chapters that expand on some of the more important security processing that occurs during an ASP.NET request as well as the extensibility points available to you for modifying ASP.NET’s security behavior. This book describes security behavior primarily for Windows Server 2003 running IIS6 and ASP.NET. -

Manual Técnico Portal Para El Centro De Capacitación Continua De La Fica
MANUAL TÉCNICO – PORTAL PARA EL CENTRO DE CAPACITACIÓN CONTINUA DE LA FICA MANUAL TÉCNICO PORTAL PARA EL CENTRO DE CAPACITACIÓN CONTINUA DE LA FICA INSTALACIÓN Es necesario instalar Linux Red Hat 8.0 como servidor, agregando los siguientes paquetes mínimos al momento de la instalación: Desktops: - Sistema X Window - Entorno GNOME Aplications: - Editores (Emacs, vi) - Internet gráfica Servers - Herramientas de configuración del servidor - Servidor Web - Servidor de nombres DNS (BIND) - Servidor de bases de datos - Servidor FTP - Servidor de red Development: - Herramientas de desarrollo (automake, gcc, perl, pitón y depuradores) - Desarrollo de software X (aplicaciones para X window) - Desarrollo de software de GNOME (desarrollar GTK+) System - Herramientas de administración (cuentas de usuario, gestión) - Herramientas del sistema PABLO ANDRÉS LANDETA LÓPEZ 1 UTN – FICA -EISI MANUAL TÉCNICO – PORTAL PARA EL CENTRO DE CAPACITACIÓN CONTINUA DE LA FICA - Soporte para impresión Es muy importante instalar la parte de Development, por cuanto vamos a instalar Mono desde su código fuente, y es necesario compilar las librerías utilizando por ejemplo los compiladores de C++ (gcc). Si instalamos Mono utilizando los archivos .rpm al momento de instalar las aplicaciones nos indicará las dependencias necesarias. Una vez que se tiene instalado la versión Red Hat 8.0 de Linux, e instalado la base de datos MySQL, debemos tener los instaladores (código fuente) de Mono que son los siguientes: mono-0.28.tar.gz mcs-0.28.tar.gz xsp-0.5.tar.gz Primeramente abrimos -
ETSI TR 102 659-1 V1.2.1 (2009-10) Technical Report
ETSI TR 102 659-1 V1.2.1 (2009-10) Technical Report GRID; Study of ICT Grid interoperability gaps; Part 1: Inventory of ICT Stakeholders 2 ETSI TR 102 659-1 V1.2.1 (2009-10) Reference RTR/GRID-0001-1[2] Keywords analysis, directory, ICT, interoperability, testing ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice Individual copies of the present document can be downloaded from: http://www.etsi.org The present document may be made available in more than one electronic version or in print. In any case of existing or perceived difference in contents between such versions, the reference version is the Portable Document Format (PDF). In case of dispute, the reference shall be the printing on ETSI printers of the PDF version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://portal.etsi.org/tb/status/status.asp If you find errors in the present document, please send your comment to one of the following services: http://portal.etsi.org/chaircor/ETSI_support.asp Copyright Notification No part may be reproduced except as authorized by written permission. The copyright and the foregoing restriction extend to reproduction in all media. -
Arquitectura .NET
Distribution and Integration Technologies .NET Architecture Traditional Architectures Web Local Distributed Other applications applications applications applications GUI Network Scripts Data Other Services Services Web Access Services Libraries Execution environment (Posix, Win32, ...) Operating System .NET Architecture 2 Java Architecture Web Local Distributed Other applications applications applications applications Swing Enterprise Java Server JDBC Others Java Beans Pages Standard Java Packages Java Virtual Machine (JVM) Operating System .NET Architecture 3 .NET Architecture Web Local Distributed Other applications applications applications applications Windows Enterprise ASP.NET ADO.NET Others Forms Services .NET Framework Class Library (FCL) Common Language Runtime (CLR) Operating System .NET Architecture 4 Common Language Runtime (CLR) All .NET applications use the CLR The CLR is OO It is independent from high level languages The CLR supports: . A common set of data types for all languages (CTS) . An intermediate language independent from the native code (CIL) . A common format for compiled code files (assemblies) All the software developed using the CLR is known as managed code .NET Architecture 5 Common Type System (CTS) All the languages able to generate code for the CLR make use of the CTS (the CLR implements the CTS) heap There is 2 type categories: string . Value “abcdef” • Simple types stack • Allocated in the stack top class A 41 String: . Reference Double: 271.6 • Complex types • Allocated in the heap • Destroyed automatically