Machine Learning Methods for Climbing Route Classification
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Heuristic Approach to Indoor Rock Climbing Route Generation Frank Stapel University of Twente P.O
A Heuristic Approach to Indoor Rock Climbing Route Generation Frank Stapel University of Twente P.O. Box 217, 7500AE Enschede The Netherlands [email protected] ABSTRACT routes can be used in many applications, of which two The problem of setting a good climbing route is faced in important applications come to mind: many ways around the world. This research looks into First of all, there is the setting of routes for competitions. the possibilities of generating climbing routes. We aim to A competition route needs to be increasingly difficult to achieve this by creating a greedy algorithm using heuris- distinguish climbers based on their climbing skills. Setting tics based on the analysis of existing climbing routes. The a route that is gradually increasing in difficulty has proven algorithm generates multiple routes using trees and deter- to be a hard task when looking back at the routes of the mines the quality of those routes. To make the research climbing World Cups of the last couple of years. Having feasible the algorithm was implemented using Python and a route generated that can gradually increase in difficulty applied to the structure and constraints of a MoonBoard. would be a solution to this problem. The generated routes were then compared to existing Moon- The second application lies in training. Training on a sys- Board routes by experienced climbers. Based on their tem board [1] can quickly get repetitive when a climber comparisons the quality of the routes was assessed based climbs a certain route multiple times as resistance train- on criteria found by analysis and evaluation of existing ing. -

2. the Climbing Gym Industry and Oslo Klatresenter As
Norwegian School of Economics Bergen, Spring 2021 Valuation of Oslo Klatresenter AS A fundamental analysis of a Norwegian climbing gym company Kristoffer Arne Adolfsen Supervisor: Tommy Stamland Master thesis, Economics and Business Administration, Financial Economics NORWEGIAN SCHOOL OF ECONOMICS This thesis was written as a part of the Master of Science in Economics and Business Administration at NHH. Please note that neither the institution nor the examiners are responsible − through the approval of this thesis − for the theories and methods used, or results and conclusions drawn in this work. 2 Abstract The main goal of this master thesis is to estimate the intrinsic value of one share in Oslo Klatresenter AS as of the 2nd of May 2021. The fundamental valuation technique of adjusted present value was selected as the preferred valuation method. In addition, a relative valuation was performed to supplement the primary fundamental valuation. This thesis found that the climbing gym market in Oslo is likely to enjoy a significant growth rate in the coming years, with a forecasted compound annual growth rate (CAGR) in sales volume of 6,76% from 2019 to 2033. From there, the market growth rate is assumed to have reached a steady-state of 3,50%. The period, however, starts with a reduced market size in 2020 and an expected low growth rate from 2020 to 2021 because of the Covid-19 pandemic. Based on this and an assumed new competing climbing gym opening at the beginning of 2026, OKS AS revenue is forecasted to grow with a CAGR of 4,60% from 2019 to 2033. -

Smith Rock (All Dates Are Month/Day/Year)
Smith Rock (all dates are month/day/year) 5.2 Arrowpoint, Northwest Corner (5.2 Trad) comments: This is the obvious way up the Arrowpoint. Although extremely short, it rewards one with a rare Smith summit experience, which is nice after climbing one of the multi-pitch routes on Smith Rock group. Unfortunately, the Arrowhead is not the true summit of the Smith Rock group. gear: 3 or 4 cams to #3 Camalot ascents: 06/25/2005 lead (approached via Sky Ridge) 03/23/2009 lead (approached via Sky Ridge, PB seconded) 5.5 New Route Left of Purple Headed Warrior (5.5 ? Bolts) comments: Squeeze job with so-so climbing. ascents: 11/6/2016 lead Bits and Pieces (1st Pitch) (5.5 Bolts) comments: Very easy fun route on huge knobs. ascents: 06/17/2001 lead My Little Pony (5.5 Bolts) comments: To the right of the Adventurous Pillar there are four bolted routes. This is the fourth one from the left. ascents: 05/09/2004 lead Night Flight (5.5 Bolts) comments: Route 22 in the Dihedrals section of smithrock.com, to the left of Left Slab Crack. Nice and easy lead. ascents: 03/16/2001 lead 03/30/2001 2nd (continued on Easy Reader 2nd pitch) North Slab Crack (5.5X or TR) comments: Horrible route. ascents: 09/16/2000 (TR) Pack Animal (to Headless Horseman belay) (5.5 Trad) comments: Easy and short trad lead. ascents: 02/08/2004 lead Spiderman Variation (1st pitch) (5.5 Trad) comments: Nice, but not as good as the 1st pitch of Spiderman proper. -

Kiwi Canyons Grading Table
Kiwi Canyons Grading Introduction The modern sport of canyoning has its roots strongly centered in Europe, and in particular France. As the sport began to really take off, a number of French Outdoor Associations standardised their grading systems in 2003. The gradings presented here are the English translation of those agreed on by the French Federation of Mountain Climbing (FFME), with support from the French Federation of Speleology (FFS) in conjunction with the National Union of Mountain Guides (SNGM), the National Union of Professionals Climbing and Canyoning (SNAPEC), the National Union of Professional Speoleogy and Canyoning (SNPSC) and the Federation of French Alpine Clubs (FCAF). There are several different canyon grading systems around the world, as our canyons are most similar to the European ones, the French grading system is used in NZ as it aligns with ‘best international practice’. Grading any technical activity is always an exercise in compromise. The grading is indicative of the most difficult section of the canyon and reflects the technical skill required to descend that part. In the grade, there is no way to distinguish between a canyon with one difficult section and another canyon where the whole canyon has difficult drop after difficult drop. The gradings must be used in conjunction with route descriptions and CanyonTopo to gain a better understanding of the overall difficulty of the trip. Remember that Canyons change with every flood, to the point that the initial grade may change. Assumptions The gradings here assume the following; An average water flow for the usual season that particular canyon is descended. -
Risk Assessment for Abseiling
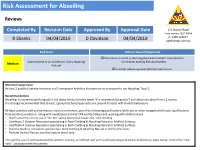
Risk Assessment for Abseiling Reviews Completed By Revision Date Approved By Approval Date 171 Nojoor Road Twin waters QLD 4564 P: 1300 122677 R Shanks 04/04/2019 D Davidson 04/04/2019 Apexcamps.com.au Risk level Action required/approval Document controls in planning documents and/or complete this Some chance or an incident or injury requiring Curriculum Activity Risk Assessment. Medium first aid Consider obtaining parental/carer permission. Minimum supervision At least 1 qualified Activity Instructor and 1 competent Activities Assistant are to be present to run Abseiling. Total 2. Recommendations Abseiling is recommended for grade 5 and above for the 6 metre tower. It is recommended grades 7 and above can abseil from 12 metres . It is strongly recommended that at least 1 group teachers/supervisors are present to assist with student behaviours All Apex activities staff and contractors hold at a minimum ,one of the following qualifications /skills sets or other recognised skill sets/ qualifications from another jurisdiction, along with mandatory First Aid/ CPR and QLD Blue Card, working with children check. • Staff trained for correct use of “Gri Gri” safety device that lowers the rock climbing . • Certificate 3 Outdoor Recreation specialising in Rock Climbing & Abseiling Natural or Artificial Surfaces • Certificate 4 Outdoor Recreation specialising in Rock Climbing & Abseiling Natural or Artificial Surfaces • Diploma Outdoor recreation specialising is Rock Climbing & Abseiling Natural or Artificial Surfaces • Perform Vertical Rescue also Haul system abseil only. Through the use of well maintained equipment, training, accredited staff and sound operating procedures and policies, Apex Camps control the “real risks” associated with this activity In assessing the level of risk, considerations such as the likelihood of an incident happening in combination with the seriousness of a consequence are used to gauge the overall risk level for an activity. -

Guide to Equipment and Clothing
GUIDE TO EQUIPMENT AND CLOTHING GEAR FOR MOUNTAINEERING IN NEW ZEALAND This document provides advice on choosing the right clothing and gear for your Alpine Guides mountain trip. Refer to your trips' "Equipment Checklist" to find the exact gear you need. Use the information here as a guide only. We run a range of programs that vary in duration and emphasis. If you are not sure if your gear is right for the job, please contact us GUIDE TO EQUIPMENT AND CLOTHING GEAR FOR MOUNTAINEERING IN NEW ZEALAND INDEX PAGE How to Dress | Gear for Different Seasons Clothing | Layering, Thermals, and Fabrics Outer layer: Jackets & Overtrousers Hats, Gloves, Socks, Gaiters, and other items Boots and Footwear Technical Hardware | Crampons, Ice Axes, and more Sleeping Essentials | Sleeping bags, Bivouac bags Touring Gear: Skis, Boots, & Snowboards Miscellaneous Gear - Everything else How to Dress | Gear for Different Seasons Choose your mountain wardrobe around the time of year you will visit. Mountain huts are not heated. Temperatures are colder at night, even during summer. If your trip involves camping out, go for the warmest possible combination of clothing. Winter Gear (July - October) Choose: • Warmer down (500+ loft) and synthetic jackets • Medium to heavy grade thermals and socks • Warm, insulated gloves • 4-season sleeping bags (rated to approx -12°C) • Avoid using drinking bladders and hoses during winter - they are prone to freeze even when insulated. Summer Gear (November - April) There is a wide range of temperatures through summer. Be prepared for cool, to cold temperatures during storms and at night. Choose: • 3-season sleeping bags (rated to approx -5°C) • 400-500 loft down jackets or synthetic insulating jackets • Lightweight to mid-weight thermals and socks • UV Protection is Vital Through December, January and February especially bring "cooling" garments that will reflect UV. -

US EPA, Pesticide Product Label, Carabiner,08/12/2019
U.S. ENVIRONMENTAL PROTECTION AGENCY EPA Reg. Number: Date of Issuance: Office of Pesticide Programs Registration Division (7505P) 34704-1130 8/12/19 1200 Pennsylvania Ave., N.W. Washington, D.C. 20460 NOTICE OF PESTICIDE: Term of Issuance: X Registration Reregistration Unconditional (under FIFRA, as amended) Name of Pesticide Product: Carabiner Name and Address of Registrant (include ZIP Code): LOVELAND PRODUCTS INC. P.O. BOX 1286 GREELEY, CO 80632 Note: Changes in labeling differing in substance from that accepted in connection with this registration must be submitted to and accepted by the Registration Division prior to use of the label in commerce. In any correspondence on this product always refer to the above EPA registration number. On the basis of information furnished by the registrant, the above named pesticide is hereby registered under the Federal Insecticide, Fungicide and Rodenticide Act. Registration is in no way to be construed as an endorsement or recommendation of this product by the Agency. In order to protect health and the environment, the Administrator, on his motion, may at any time suspend or cancel the registration of a pesticide in accordance with the Act. The acceptance of any name in connection with the registration of a product under this Act is not to be construed as giving the registrant a right to exclusive use of the name or to its use if it has been covered by others. This product is unconditionally registered in accordance with FIFRA section 3(c)(5) provided that you: 1. Submit and/or cite all data required for registration/reregistration/registration review of your product when the Agency requires all registrants of similar products to submit such data. -
Release of Liability and Idemnity Form
River Rock Release of Liability and Assumption of Risk Last Name First Name Middle Name Date of Birth Address City State Zip Code Cell Phone Home Phone Work Phone Email Address May we email you about events or special deals? □ Yes □ No Emergency Contact Name Emergency Contact Phone The undersigned individual desires to use the River Rock Climbing, LLC (“RRC”) rock climbing gym (the “Facility”). Use of the Facility may include, without limitation, formal or informal instruction by RRC staff, participation in clinics, classes, courses, camps, programs, competitions and/or any other activities occurring in the Facility and/or sponsored, organized, managed, operated or run by RRC. In consideration of RRC permitting me to use the Facility, I hereby execute this Release of Liability, Indemnification and Assumption of Risks (the“Release”). I acknowledge that using the Facility involves certain inherent risks, including, but not limited to, Sprains, strains, broken bones and other musculoskeletal injuries; Cuts, burns and abrasions; Head trauma; Broken necks; Death; and Other forms of serious personal and property injury or damage. The accidents can occur as a result of accidents, equipment failures, personal inattention of myself or others (including staff), the neglect of myself or others (including staff) or other causes. I hereby assume all such risks, as well as any other risks involved in using the Facility, at any time, whether or not under the supervision of RRC staff. I hereby release, discharge and covenant not to sue RRC, its -

The Thick-Splay Depositional Style of the Crevasse Canyon Formation, Cretaceous of West-Central New Mexico Steven J
New Mexico Geological Society Downloaded from: http://nmgs.nmt.edu/publications/guidebooks/34 The thick-splay depositional style of the Crevasse Canyon Formation, Cretaceous of west-central New Mexico Steven J. Johansen, 1983, pp. 173-178 in: Socorro Region II, Chapin, C. E.; Callender, J. F.; [eds.], New Mexico Geological Society 34th Annual Fall Field Conference Guidebook, 344 p. This is one of many related papers that were included in the 1983 NMGS Fall Field Conference Guidebook. Annual NMGS Fall Field Conference Guidebooks Every fall since 1950, the New Mexico Geological Society (NMGS) has held an annual Fall Field Conference that explores some region of New Mexico (or surrounding states). Always well attended, these conferences provide a guidebook to participants. Besides detailed road logs, the guidebooks contain many well written, edited, and peer-reviewed geoscience papers. These books have set the national standard for geologic guidebooks and are an essential geologic reference for anyone working in or around New Mexico. Free Downloads NMGS has decided to make peer-reviewed papers from our Fall Field Conference guidebooks available for free download. Non-members will have access to guidebook papers two years after publication. Members have access to all papers. This is in keeping with our mission of promoting interest, research, and cooperation regarding geology in New Mexico. However, guidebook sales represent a significant proportion of our operating budget. Therefore, only research papers are available for download. Road logs, mini-papers, maps, stratigraphic charts, and other selected content are available only in the printed guidebooks. Copyright Information Publications of the New Mexico Geological Society, printed and electronic, are protected by the copyright laws of the United States. -
Rock Climbing Fundamentals Has Been Crafted Exclusively For
Disclaimer Rock climbing is an inherently dangerous activity; severe injury or death can occur. The content in this eBook is not a substitute to learning from a professional. Moja Outdoors, Inc. and Pacific Edge Climbing Gym may not be held responsible for any injury or death that might occur upon reading this material. Copyright © 2016 Moja Outdoors, Inc. You are free to share this PDF. Unless credited otherwise, photographs are property of Michael Lim. Other images are from online sources that allow for commercial use with attribution provided. 2 About Words: Sander DiAngelis Images: Michael Lim, @murkytimes This copy of Rock Climbing Fundamentals has been crafted exclusively for: Pacific Edge Climbing Gym Santa Cruz, California 3 Table of Contents 1. A Brief History of Climbing 2. Styles of Climbing 3. An Overview of Climbing Gear 4. Introduction to Common Climbing Holds 5. Basic Technique for New Climbers 6. Belaying Fundamentals 7. Climbing Grades, Explained 8. General Tips and Advice for New Climbers 9. Your Responsibility as a Climber 10.A Simplified Climbing Glossary 11.Useful Bonus Materials More topics at mojagear.com/content 4 Michael Lim 5 A Brief History of Climbing Prior to the evolution of modern rock climbing, the most daring ambitions revolved around peak-bagging in alpine terrain. The concept of climbing a rock face, not necessarily reaching the top of the mountain, was a foreign concept that seemed trivial by comparison. However, by the late 1800s, rock climbing began to evolve into its very own sport. There are 3 areas credited as the birthplace of rock climbing: 1. -
J O B D E S C R I P T I
Route Setter at The Front Climbing Club SUMMARY In this role, an experienced route setter who is passionate about rock climbing and working in a gym setting will be responsible for setting quality and consistent climbing routes throughout The Front locations, as well as performing regular wall maintenance. The Front locations include Ogden, Salt Lake City, and Millcreek. Candidates must be personable and able to climb V6+ and tope rope and lead 5.12. We are currently looking for one full time routesetter and one part time routesetter. ABOUT YOU You know what it takes to keep world class facilities running. You work carefully and efficiently, and you take pride in the quality of what you produce. You are an expert problem solver, and you want to be involved in purposeful work with legacy efficacy. You are committed to supporting your team by ensuring clear communication. Your eye for process improvement and commitment to quality control ensures you do not perform at status quo – you push your team and company to new heights (no pun intended). ABOUT US The Front Climbing Club was Utah’s first indoor rock-climbing gym, and one of the first in the nation. From its humble beginnings as The Body Shop back in the 80’s to three best-in-class facilities today, The Front has never lost its soul or connection to its roots. The Front is led by three core values, which are outlined below. These values drive our day-to-day decisions as well as the future vision for our company. We expect every member of our team to embrace these values and believe they should align with your personal values to do so. -

Climbing Wall Facilities Position Statement for the Period 2015-21
The Mountaineering Council of Scotland Climbing Wall Facilities 2015-2021 POSITION STATEMENT AMENDED VERSION 05.16 0 The Mountaineering Council of Scotland Climbing Wall Facilities Position Statement [2015-2021] Approved by the MCofS Board, 18 September 2014 CONTENTS Section Page 1. Executive Summary 2 1.1. Purpose and Background 2 1.2. Aims 2 1.3. Scope 3 1.4. Wall Development Summary 3 1.5. List of Appendices 3 1.6. Appendix: Climbing Wall Facility Position Statement Summary 4 2. Introduction 5 3. Key Aims 5 4. Player Pathways 5 5. Key Drivers for Facility Development 6 6. Desired Outcomes 7 7. Facility Development and Delivery 8 8. Facility Requirements 8 9. Scale of Facility 9 9.1. Boulder Parks 9 9.2. School Walls 10 9.3. Small Walls 10 9.4. Regional Hubs 10 9.5. Regional Hubs Designation 11 9.6. The National Performance Centre 13 9.7. The International Climbing Centre 13 9.8. The National Outdoor Training Centre 14 10. Improving Facility Provision 15 11. Conclusions and Recommendations 16 Appendices A: Player Pathway [Climber to Mountaineer - Recreational] 17 B: Player Pathway [Youth Climbing & Facility Requirements] 18 C: Player Pathway [Youth Starter Climber to Elite] 19 D: Climbing Walls Position Statement: Specifications 20 E: Climbing Walls Position Statement: 2014 Facility Review (see update Strategy) F: Climbing Walls Position Statement: Regional Hub Designation Assessment Criteria 27 1 1. Executive Summary 1.1. Purpose and Background This position statement describes how MCofS will seek to influence the development of an integrated framework of facilities for sport climbing across Scotland, which will meet MCofS aims for both sport development and the ClimbScotland club development initiative over the period 2015-2021.