Proceedings, ITC/USA
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Spectra and Bandwidth of Emissions (Question ITU-R 222/1)
Rec. ITU-R SM.328-11 1 RECOMMENDATION ITU-R SM.328-11* Spectra and bandwidth of emissions (Question ITU-R 222/1) (1948-1951-1953-1956-1959-1963-1966-1970-1974-1978-1982-1986-1990-1994-1997-1999-2006) Scope This Recommendation gives definitions, analytical models and other considerations of the values of emission components for various emission types as well as the usage of these values from the standpoint of spectrum efficiency. Keywords Spurious emission, dB bandwidth, emitted spectra, adjacent-channel, necessary band The ITU Radiocommunication Assembly, considering a) that in the interest of an efficient use of the radio spectrum, it is essential to establish for each class of emission rules governing the spectrum emitted by a transmitting station; b) that, for the determination of an emitted spectrum of optimum width, the whole transmission circuit as well as all its technical working conditions, including other circuits and radio services sharing the band, the transmitter frequency tolerances of Recommendation ITU-R SM.1045, and particularly propagation phenomena, should be taken into account; c) that the concepts of “necessary bandwidth” and “occupied bandwidth” defined in Nos. 1.152 and 1.153 of the Radio Regulations (RR), are the basis for specifying the spectral properties of a given emission, or class of emission, in the simplest possible manner; d) that, however, these definitions do not suffice when consideration of the complete problem of radio spectrum efficiency is involved; and that an endeavour should be made to establish -
NTE1416 Integrated Circuit Chrominance and Luminance Processor for NTSC Color TV
NTE1416 Integrated Circuit Chrominance and Luminance Processor for NTSC Color TV Description: The NTE1416 is an MSI integrated circuit in a 28–Lead DIP type package designed for NTSC systems to process both color and luminance signals for color televisions. This device provides two functions: The processing of color signals for the band pass amplifier, color synchronizer, and demodulator cir- cuits and also the processing of luminance signal for the luminance amplifier and pedestal clamp cir- cuits. The number of peripheral parts and controls can be minimized and the manhours required for assembly can be considerbly reduced. Features: D Few External Components Required D DC Controlled Circuits make a Remote Controlled System Easy D Protection Diodes in every Input and Output Pin D “Color Killer” Needs No Adjustements D “Contrast” Control Does Not Prevent the Natural Color of the Picture, as the Color Saturation Level Changes Simultaneously D ACC (Automatic Color Controller) Circuit Operates Very Smoothly with the Peak Level Detector D “Brightness Control” Pin can also be used for ABL (Automatic Beam Limitter) Absolute Maximum Ratings: (TA = +25°C unless otherwise specified) Supply Voltage, VCC . 14.4V Brightness Controlling Voltage, V3 . 14.4V Resolution Controlling Voltage, V4 . 14.4V Contrast Controlling Voltage, V10 . 14.4V Tint Controlling Voltage, V7 . 14.4V Color Controlling Voltage, V9 . 14.4V Auto Controlling Voltage, V8 . 14.4V Luminance Input Signal Voltage, V5 . +5V Chrominance Signal Input Voltage, V13 . +2.5V Demodulator Input Signal Voltage, V25 . +5V R.G.B. Output Current, I26, I27, I28 . –40mA Gate Pulse Input Voltage, V20 . +5V Gate Pulse Output Current, I20 . -

Blankom-Catalog-2015.Pdf
PRODUKTÜBERSICHT PRODUCT OVERVIEW 19" Systemkomponenten 2014/2015 • 19" system components 2014/2015 IN DVB-S/S2 DVB-T/T2/C A/V FM SDI HD-SDI HDMI ASI IP ISDB-T SAT-IF OUT (QPSK/8PSK) (COFDM/QAM) SPDIF QAM A-QAMOS A-QAMOS-CT A-QAMOS-IP A-QAMOS-IP (S. 19) (S. 21) (S. 26) (S. 26) A-QAMOS-4CI A-QAMOS-CT-4CI A-QAMOS-B-IP A-QAMOS-B-IP (S. 20) (S. 22) (S. 27) (S. 27) A-QAMOS-IPM A-QAMOS-IPM (S. 28) (S. 28) analog TV A-PALIOS-4CIM4 A-PALIOS-CTM4 A-PALIOS-IPM4 A-PALIOS-IPM4 (AM) (S. 25) (S. 23) (S. 29) (S. 29) DRP 393 A-PALIOS-CTM4CI A-PALIOS-IPM4CI A-PALIOS-IPM4CI (S. 37) (S. 24) (S. 30) (S. 30) ASI-TS DRD 700 DRD 700 EMA 608 EMA 408/608 EMA 408 EMA 508/708 DRD 700 DIP 2xx DRP 393 (S. 32) (S. 32) (S. 17) (S. 15/S. 17) (S. 15) (S. 16/S. 18) (S. 32) (S. 42) (S. 34) DRP 393 DRP 393 EMA 508/708 EMA 508/708 DRP 393 (S. 34) (S. 34) (S. 16/S. 18) (S. 16/S. 18) (S. 34) EMA 608 (S. 17) IP DRD 700 DRD 700 EMA 408/608 EMA 508/708 EMA 408 EMA 508/708 EMA 508/708 DRD 700 DRD 393 (S. 32) (S. 32) (S.15/S. 17) (S. 16/S. 18) (S. 15) (S. 16/S. 18) (S. 16/S. 18) (S. 32) (S. 34) DRP 393 DRP 393 EMA 408/608 EMA 508/708 EMA 408/608 (S. -
I the Telecommunications and Data Acquisition:Progress Report 42-67 R --" - ':' .' November and December1981
F "_ NASA-CR_168577 ..... 19820012239 --- i The Telecommunications and Data _ Acquisition:Progress Report 42-67 r_ --" - ':'_ _.' November and DeCember1981 -- • - N.A. Renzetti .... Editor - _ , • % ° '_ i " ; ,ir_,-- •_' [ / - • I.;.4.9R 1982 February 15; 1982--:; _ " LANGLEY.RESEARCHCENTER • _ . -....-......-._..LIRR_.RY,.NA_A "" _ ¢ F HAMPTON_VIRGINIA _- NationalAeronauticsand - - Space Administration "- . " Jet PropulsionLabOratory - -_ ' _-__ California Instituteof Technology - _........ " " _- Pasadena, California ..... - "T ' • _ . _ J . _ .. :, , _ . :? . - , . " • _, ° /" _J • -_ + . 1-" ? i _ z J -.2 - .,/° . • " ' " -%- - -- I -- _ -,.- . _ ° ] L9< ._ . ,: _ - . j , • ./ . c - " • ' J - -- "< ° _ , _ '] . -; ,_ g __ , ,2 ./ -- i -, . ,. ,-,- C,,_ _- _;>" .... ' _ . - } °I // -,' .... ,: , \ / "._'\ " _ " . _ , _ \ _ _ _ _ - . - . [-- _ . -. ._ ,_ . _ _ , . - . '.___ _. .. _ l _ . _" ! "" 't ',_' '_ , . " f_ .. "- . " - r]. : ._ 2 _. • - - ' I"D. -/7 " - - _ ". ._ . "-. _ . .'_ :. _ ,-. - - . - -- _ _ %" '( Y" .W - \" - _ _ .-- 7 - . • " , - f . ,-.-._,-, t-, , r:'fi,ti;"!TS ;,E_.I!.E-STED E!,I-_J R," D ,_.t,n-.,I'!,i !:-,..... D!SPLA', _1120113/2 " "_ 82M20113,# iSSUE 
LM2889 RF Modulator
LM2889 R.F. Modulator AN-402 National Semiconductor LM2889 R.F. Modulator Application Note 402 Martin Giles June 1985 Introduction older receivers that have inadequate shielding between the antenna input and the tuner. Two I/C RF modulators are available that have been espe- The characteristics of the R.F. signal are loosely regulated cially designed to convert a suitable baseband video and by the FCC under part 15, subpart H. Basically the signal audio signal up to a low VHF modulated carrier (Channel 2 can occupy the standard T.V. channel bandwidth of 6 MHz, through 6 in the U.S., and 1 through 3 in Japan). These are and any spurious (or otherwise) frequency components the LM1889 and LM2889. Both I/C's are identical regarding more than 3 MHz away from the channel limits must be the R.F. modulation functionÐincluding pin-outsÐand can suppressed by more than 30 dB from the peak carrier provide either of two R.F. carriers with dc switch selection of b level. The peak carrier power is limited to 3 mVrms in 75X the desired carrier frequency. The LM1889 includes a crys- or 6 mVrms in 300X, and the R.F. signal must be hard-wired tal controlled chroma subcarrier oscillator and balanced to the receiver through a cable. Most receivers are able to modulators for encoding (R-Y) and (B-Y) or (U) and (V) color provide noise-free pictures when the antenna signal level difference signals. A sound intercarrier frequency L-C oscil- exceeds 1 mVrms and so our goal will be to have an R.F. -

Tektronix Television Systems Measurement Concepts 062-1064-00
Measurement Concepts Television Systems TELEVISION SYSTEM MEASUREMENTS BY GERALD A. EASTMAN MEASUREMENT CONCEPTS INTRODUCTION The primary intent of this book is to acquaint the reader with the functional elements of a television broadcast studio and some of the more common diagnostic and measurement concepts on which video measurement techniques are based. In grouping the functional elements of the broadcasting studio, two areas of primary concern can be identified -- video signal sources and the signal routing path from the source to the transmitter. The design and maintenance of these functional elements is based in large measure on their use and purpose. Understanding the use and purpose of any device always enhances the engineer's or technician's ability to maintain the performance initially designed into the equipment. The functional elements of the broadcast studio will be described in the first portion of this book including a brief discussion of how these functional elements interrelate to form an integrated system. In the broadcasting studio, once the video sources and routing systems are initially established, maintaining quality control of both the sources and the routing path becomes one of the major concerns of the broadcast engineer. Since the picture information is transmitted as a video waveform, quality control can in large measure be accomplished in terms of waveform distortions and subjective picture quality degradations. Four major test waveforms, each designed to observe and measure a specific type of distortion, are commonly used in a broadcast studio. The diagnostic information contained in each waveform will be described in the latter portion of this book in terms of the measurements commonly made with each of the four waveforms. -

An Externally-Synchronized Coherent Communication System Design
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Doctoral Dissertations Graduate School 5-2001 An Externally-Synchronized Coherent Communication System Design Gary R. Ragsdale University of Tennessee - Knoxville Follow this and additional works at: https://trace.tennessee.edu/utk_graddiss Part of the Electrical and Computer Engineering Commons Recommended Citation Ragsdale, Gary R., "An Externally-Synchronized Coherent Communication System Design. " PhD diss., University of Tennessee, 2001. https://trace.tennessee.edu/utk_graddiss/2073 This Dissertation is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Doctoral Dissertations by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a dissertation written by Gary R. Ragsdale entitled "An Externally- Synchronized Coherent Communication System Design." I have examined the final electronic copy of this dissertation for form and content and recommend that it be accepted in partial fulfillment of the equirr ements for the degree of Doctor of Philosophy, with a major in Electrical Engineering. Daniel B. Koch, Major Professor We have read this dissertation and recommend its acceptance: Michael J. Roberts, Paul B. Crilly, Balram S. Rajput Accepted for the Council: Carolyn R. Hodges Vice Provost and Dean of the Graduate School (Original signatures are on file with official studentecor r ds.) To the Graduate Council: We are submitting herewith a dissertation written by Gary Ragsdale entitled “An Externally-Synchronized Coherent Communication System Design.” We have examined the final copy of this dissertation for form and content and recommend that it be accepted in partial fulfillment of the requirements for the degree of Doctor of Philosophy, with a major in Electrical Engineering. -
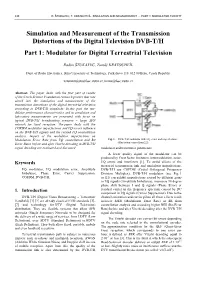
Simulation and Measurement of the Transmission Distortions of the Digital Television DVB-T/H Part 1: Modulator for Digital Terrestrial Television
338 R. ŠTUKAVEC, T. KRATOCHVÍL, SIMULATION AND MEASUREMENT … PART 1: MODULATOR FOR DTT Simulation and Measurement of the Transmission Distortions of the Digital Television DVB-T/H Part 1: Modulator for Digital Terrestrial Television Radim ŠTUKAVEC, Tomáš KRATOCHVÍL Dept. of Radio Electronics, Brno University of Technology, Purkyňova 118, 612 00 Brno, Czech Republic [email protected], [email protected] Abstract. The paper deals with the first part of results of the Czech Science Foundation research project that was aimed into the simulation and measurement of the transmission distortions of the digital terrestrial television according to DVB-T/H standards. In this part the mo- dulator performance characteristics and its simulation and laboratory measurements are presented with focus on typical DVB-T/H broadcasting scenario – large SFN network for fixed reception. The paper deals with the COFDM modulator imperfections and I/Q errors influence on the DVB-T/H signals and the related I/Q constellation analysis. Impact of the modulator imperfections on Modulation Error Rate from I/Q constellation and Bit Fig. 1. DVB-T/H modulator with I/Q errors and imperfections Error Rates before and after Viterbi decoding in DVB-T/H (illustration comes from [2]). signal decoding are evaluated and discussed. modulator and transmitter parameters. A lower quality signal of the modulator can be produced by Crest factor limitation, intermodulation, noise, Keywords I/Q errors and interferers [1]. To avoid effects of the terrestrial transmission link and modulator imperfections, I/Q modulator, I/Q modulation error, Amplitude DVB-T/H use COFDM (Coded Orthogonal Frequency Imbalance, Phase Error, Carrier Suppression, Division Multiplex). -

NTE7150 Integrated Circuit Video, Chroma, and Sync. Signal
NTE7150 Integrated Circuit Video, Chroma, and Sync. Signal Processing Circuit for PAL/NTSC/SECAM System Color Televisions Description: The NTE7150 is an integrated circuit in a 64–Lead SIP type package designed for PAL/NTSC/SECAM system color televisions involving video, chroma, and sync. signal processing circuits. The video section contains a high–performance picture quality emphasis circuit, the chroma section contains a PAL/NTSC/SECAM system automatic identification circuit, and the sync. section contains a 50/60Hz automatic identification circuit. The PAL/SECAM demodulating circuit uses a baseband signal processing system, providing an adjustment–free demodulating circuit. User control functions, system switching, etc. are controlled via the I2C bus. Features: Video Section D Sharpness Control with Internal Delay Lines D Black Stretching Circuit D YNR D Variable DC Restoration Ratio D Gamma (g) Contrast Correction Chroma Section D PAL/SECAM baseband Demodulation System D Automatic Srystal Frequency Identification (4.43MHz/3.58MHz/M, N–PAL) D Automatic Chroma System Identification (PAL/NTSC/SECAM) D PLL SECAM Adjustment–Free Demodulation Circuit without and Tank Coils D Built–In SECAM BELL Filter Sync. Section D Adjnustment–Free Horizontal and Vertical Oscillation Circuits based on Countdown System D Automatic Vertical Frequency Identification (50/60Hz) Absolute Maximum Ratings: (TA = +25°C unless otherwise specified) Supply Voltage, VCC . 15V Power Dissipation, PDmax. 2660mW Derate Above 25°C. 21.2mW/°C Input Signal Amplitude, ein -

Low Complexity Blind Estimation of Residual Carrier Offset in OFDM-Based Wireless Local Aria Network Systems
Low complexity blind estimation of residual carrier offset in OFDM-based wireless local aria network systems Citation for published version (APA): Attallah, S., Wu, Y., & Bergmans, J. W. M. (2007). Low complexity blind estimation of residual carrier offset in OFDM-based wireless local aria network systems. IET Communications, 1(4), 604-611. https://doi.org/10.1049/iet-com:20060120 DOI: 10.1049/iet-com:20060120 Document status and date: Published: 01/01/2007 Document Version: Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers) Please check the document version of this publication: • A submitted manuscript is the version of the article upon submission and before peer-review. There can be important differences between the submitted version and the official published version of record. People interested in the research are advised to contact the author for the final version of the publication, or visit the DOI to the publisher's website. • The final author version and the galley proof are versions of the publication after peer review. • The final published version features the final layout of the paper including the volume, issue and page numbers. Link to publication General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. -

Recommendation Itu-R Bt.1368-4*, **
Rec. ITU-R BT.1368-4 1 RECOMMENDATION ITU-R BT.1368-4*, ** Planning criteria for digital terrestrial television services in the VHF/UHF bands (Question ITU-R 4/6) (1998-1998-2000-2002-2004) The ITU Radiocommunication Assembly, considering a) that systems are being developed for the transmission of digital terrestrial television services in the VHF/UHF bands; b) that the VHF/UHF television bands are already occupied by analogue television services; c) that the analogue television services will remain in use for a considerable period of time; d) that the availability of consistent sets of planning criteria agreed by administrations will facilitate the introduction of digital terrestrial television services, recommends 1 that the relevant protection ratios (PRs) and the relevant minimum field strength values given in Annexes 1, 2 and 3, and the additional information given in Annexes 4, 5, 6 and 7 be used as the basis for frequency planning for digital terrestrial television services. ____________________ * The Administrations of the Islamic Republic of Iran and Syrian Arab Republic are not in a position to be bound by “the planning criteria for digital terrestrial television services in the VHF/UHF bands” as shown in this Recommendation. ** The Administrations of Egypt and Syrian Arab Republic reserve their position on all proposed co-channel protection ratios and other proposed protection ratios until being decided by the Regional Radiocommunication Conference (Geneva, 2004) (RRC-04). 2 Rec. ITU-R BT.1368-4 Introduction This Recommendation -

Recommendations and Reports of the Ccir, 1986
This electronic version (PDF) was scanned by the International Telecommunication Union (ITU) Library & Archives Service from an original paper document in the ITU Library & Archives collections. La présente version électronique (PDF) a été numérisée par le Service de la bibliothèque et des archives de l'Union internationale des télécommunications (UIT) à partir d'un document papier original des collections de ce service. Esta versión electrónica (PDF) ha sido escaneada por el Servicio de Biblioteca y Archivos de la Unión Internacional de Telecomunicaciones (UIT) a partir de un documento impreso original de las colecciones del Servicio de Biblioteca y Archivos de la UIT. (ITU) ﻟﻼﺗﺼﺎﻻﺕ ﺍﻟﺪﻭﻟﻲ ﺍﻻﺗﺤﺎﺩ ﻓﻲ ﻭﺍﻟﻤﺤﻔﻮﻇﺎﺕ ﺍﻟﻤﻜﺘﺒﺔ ﻗﺴﻢ ﺃﺟﺮﺍﻩ ﺍﻟﻀﻮﺋﻲ ﺑﺎﻟﻤﺴﺢ ﺗﺼﻮﻳﺮ ﻧﺘﺎﺝ (PDF) ﺍﻹﻟﻜﺘﺮﻭﻧﻴﺔ ﺍﻟﻨﺴﺨﺔ ﻫﺬﻩ .ﻭﺍﻟﻤﺤﻔﻮﻇﺎﺕ ﺍﻟﻤﻜﺘﺒﺔ ﻗﺴﻢ ﻓﻲ ﺍﻟﻤﺘﻮﻓﺮﺓ ﺍﻟﻮﺛﺎﺋﻖ ﺿﻤﻦ ﺃﺻﻠﻴﺔ ﻭﺭﻗﻴﺔ ﻭﺛﻴﻘﺔ ﻣﻦ ﻧﻘﻼ ً◌ 此电子版(PDF版本)由国际电信联盟(ITU)图书馆和档案室利用存于该处的纸质文件扫描提供。 Настоящий электронный вариант (PDF) был подготовлен в библиотечно-архивной службе Международного союза электросвязи путем сканирования исходного документа в бумажной форме из библиотечно-архивной службы МСЭ. © International Telecommunication Union INTERNATIONAL TELECOMMUNICATION UNION CCIR INTERNATIONAL RADIO CONSULTATIVE COMMITTEE RECOMMENDATIONS AND REPORTS OF THE CCIR, 1986 (ALSO QUESTIONS, STUDY PROGRAMMES, RESOLUTIONS, OPINIONS AND DECISIONS) XVIth PLENARY ASSEMBLY DUBROVNIK, 1986 VOLUMES IV AMD IX - PART 2 FREQUENCY SHARING AND COORDINATION BETWEEN SYSTEMS IN THE FIXED-SATELLITE SERVICE AND RADIO-RELAY SYSTEMS Geneva, 1986 CCIR 1. The International Radio Consultative Committee (CCIR) is the permanent organ of the International Telecommunication Union responsible under the International Telecommunication Convention "... to study technical and operating questions relating specifically to radiocommunications without limit of frequency range, and to issue recommendations on them..." (Inter national Telecommunication Convention, Nairobi 1982, First Part, Chapter I, Art.