RTS AI Wall Building Research and Improvements
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Elevator Design Book. Synergy ® and Evolution ® Design Contents
Elevator Technology Elevator design book. synergy ® and evolution ® Design Contents synergy and evolution 04 Philosophy. Design line architecture 05 How to define your personal cabin 06 F design line 07 E design line 15 D design line 29 C design line 43 B design line 55 A design line 71 Cabin and landing fixtures 85 Planning tools 92 About us 93 We have turned our elevators into an architectural design element, providing users with a great thyssenkrupp ambiance they can see and feel. New design collection for synergy and evolution elevators offers a wide range of attractive styles and moods. Perfect, down to the detail. Every single element reflects our commitment to creating the optimum ride experience. From functional, robust cabin interiors to a luxurious look and feel: all design elements speak a clear language and provide exceptional quality. Our many combination possibilities allow you to select a design that perfectly meets your individual taste and needs. 4 synergy and evolution. Design line architecture. 5 synergy and evolution. Design line architecture. Our synergy and evolution elevators combine state-of-the-art technology with flexible Our synergy and evolution elevators feature new design lines, which are named with design. Immerse yourself in the design world of these two elevator families and choose letters from “F” to “A”. “F” indicates a more functional, robust design line, whereas “A” the design that suits your taste and requirements. portrays the premium designs. Our designers have developed predesigned cabins in various ambiances for each design line. In addition, the design lines A, B, E and D offer synergy evolution the opportunity to configure cabins according to your individual taste - truly custom fit. -

Clear Wall Planning Guide
Clear Wall Planning Guide December 2020 Clear Wall Planning Guide 1 Contents Five steps to specs ...................................................................................... 3 Design and Installation Planning .....................................................4 - 11 Space Planning, Site Survey and Measurement...........6 - 10 Planning Checklist ...........................................................................11 Components .........................................................................................12 - 25 Framing Elements ...................................................................13 -15 Transition Connectors ...........................................................15 - 16 Glass Inserts................................................................................ 17-18 Copolymer Strips ........................................................................... 19 Doors ..................................................................................................20 Door Sections ......................................................................... 21 - 23 Door Hardware ......................................................................24 - 25 Power/Data .................................................................................................. 26 Installation ...........................................................................................27 - 40 Clear Wall Planning Guide 2 5 Steps Five steps to specs: 1. Pre-qualify the project 2. Select Framing Elements 3. Select -

Townhouse Or Two-Family Dwelling?
TWO-FAMILY DWELLING, TWO-UNIT TOWNHOUSE and TOWNHOUSE BUILDINGS and the 2020 MINNESOTA RESIDENTIAL CODE Minnesota Department of Labor and Industry DEFINITIONS A two-family dwelling (IRC-2 occupancy) is: • A building containing two separate dwelling units. • The separation between units is either horizontal or vertical. • Both units are on one lot. • Sometimes referred to as “duplexes.” A townhouse (IRC-3 occupancy) is: • A single-family dwelling unit constructed in a group of two or more attached dwelling units. • Each unit is a separate building and extends from the foundation to the roof with open space on at least two sides of each unit. • Each unit is provided with separate building service utilities required by other chapters of the State Building Code. • A two-unit townhouse is sometimes referred to as a “twin-home.” DISTINCTION The primary differences between a two-family dwelling and a two-unit townhouse or twin-home: • Property – A two-unit townhouse or twin-home is typically located on two separate individual lots with a property line running between them whereas both units of a two-family dwelling, or “duplex,” are located on the same single lot. • Separation – A two-unit townhouse must be separated from the foundation to the roof by a double wall (two one-hour walls, see exceptions below). The separation between units in a two-family dwelling can be provided by single one-hour fire-resistance-rated assembly that is horizontal or vertical. • Services – Since each townhouse unit is a separate building, each townhouse unit must be supplied with separate utilities. Units classified as townhouses must be supplied by separate electrical services. -

Schindler 3300 MRL Traction Elevator Entrance Details
Schindler 3300 MRL Traction Elevator Entrance details Single-speed center opening (SSCO) side jamb Single-speed center opening (SSCO) top jamb 2 x 5/8” Gypsum board Wall 2HR fire rating thickness Door space (4.875”) 2 x 5/8” Gypsum board (Ref.) Wall thickness (Ref.) Wall rhickness (Ref.) Clear opening width 1” Gypsum board Rough opening width J-Runner See note A See note A 6.75” 6.75” Rough 4.25” opening 4.25” Wall thickness height Clear Wall thickness 4.75” Wall 4.75” opening thickness height See note B minus 4.25” Wall thickness minus 4.25” See note B 4 3/8”– 5 7/8” Two-speed side opening (2SSO) side jamb Two-speed side opening (2SSO) top jamb Door space (4.875”) Wall thickness (Ref.) Wall thickness (Ref.) Clear opening width Rough opening width See note A 6.75” See note A 2.5” 5.5” Rough 2.5” opening Wall thickness height 4.75” Clear Wall thickness Wall thickness Wall thickness minus 2.5” minus 2.5” opening 4.75” height See note B See note B Strike side Return side 4 3/8”– 5 7/8” Note A: Fire rating is maintained by the interface at this area only. Note B: Finished wall by others. No fire rating at this point. Wall thickness can vary, as jamb thickness remains constant. Dimensions Capacity lbs (kg) Door Type Clear Opening Width x Height ft (mm) Rough Opening Width x Height ft (mm) 2100 (950) 2SSO 3’- 0” x 7’- 0” (915 x 2134) 4’- 4” x 7’- 8” (1321 x 2337) 2SSO 3’- 6” x 7’- 0” (1067 x 2134) 4’- 10” x 7’- 8” (1473 x 2337) 2500 (1135) SSCO 3’- 6” x 7’- 0” (1067 x 2134) 4’- 10” x 7’- 8” (1473 x 2337) General Purpose 2SSO 3’- 6” x 7’- 0” (1067 x 2134) 4’- 10” x 7’- 8” (1473 x 2337) 3000 (1360) SSCO 3’- 6” x 7’- 0” (1067 x 2134) 4’- 10” x 7’- 8” (1473 x 2337) 2SSO 3’- 6” x 7’- 0” (1067 x 2134) 4’- 10” x 7’- 8” (1473 x 2337) 3500 (1590) SSCO 3’- 6” x 7’- 0” (1067 x 2134) 4’- 10” x 7’- 8” (1473 x 2337) Schindler 3300 MRL Traction Elevator Entrance details Landing door mounting options General requirements Requirements for installation vary by type of equipment selected. -

Save Space by Mounting Your Equipment to the Wall Or Other Surface
Vertical Wall-Mount Server Rack - Solid Steel - 6U StarTech ID: RK619WALLV This wall-mount bracket provides 6U of storage space to vertically mount your equipment on the wall. The 6U wall-mount rack is EIA-310-D compliant to ensure compatibility with any 19” rack-mount equipment, such as your power strips, telecommunication, network and A/V devices. Save space by mounting your equipment to the wall or other surface The 6U rack optimizes your working space by mounting equipment to your wall instead of taking up desk space or other surface area. It's perfect for your SoHo (small office, home office) environment, server room or any other location where available space is limited. Ensure a secure and hassle-free installation The wall rack is constructed of solid steel to ensure a sturdy and safe mounting solution for your expensive, mission-critical equipment. Also, because the wall mounting holes are positioned 16”apart, it exactly matches standard drywall construction framework to ensure simple and secure wall-stud anchoring. Cage nuts and screws are also included with the wall-mount bracket, to save you the hassle of sourcing separate mounting hardware. Customize your workspace with versatile installation options To provide a suitable mounting solution for virtually any surface such as your wall, ceiling or desk, the 6U bracket features separate mounting patterns for both ceilings and walls. This means that you can mount the bracket vertically to your wall or horizontally to your ceiling or under your desk. If you're looking for a mountable storage solution with fewer rack units, StarTech.com also offers a 1U wall- mount bracket, a 2U wall-mount bracket, a 3U wall-mount bracket and a 4U wall-mount bracket. -
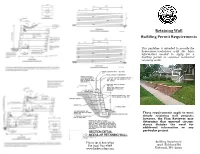
Retaining Wall Building Permit Requirements
Retaining Wall Building Permit Requirements This guideline is intended to provide the homeowner/contractor with the basic information needed to apply for a building permit to construct residential retaining walls. These requirements apply to most simple retaining wall projects; however, the Plan Reviewer may determine that unusual circum- stance dictates the need for additional information on any particular project. Phone (314) 822-5823 Building Department 139 S. Kirkwood Rd Fax (314) 822-5898 www.kirkwoodmo.org Kirkwood, MO 63122 Complete cross-sectional drawing of wall Plans for small residential retaining walls A permit is required for any to scale. complying with the design criteria below retaining wall that is more than 2' in may be drawn by the homeowner/ height above the lowest adjacent Elevation view from the low grade side of contractor: (Note: The walls shall not be grade and for retaining walls of any wall drawn to scale. subject to any surcharge loading from steep height located in a natural water slopes, driveways, swimming pools and course or drainage swale. Guardrail details if applicable. Retaining other structures, etc.) walls more than 30”measured vertically to the grade below at any point within The proposed retaining wall is located on a 1. Fill out and sign application for a building 36” horizontally to the edge of the open parcel of land containing a one or two permit. side; are required to have a guardrail or family dwelling. other approved protective measure when 2. Submit two (2) separate copies of your site closer than 2’ to a sidewalk, path, Wood retaining walls not exceeding 6' in plan showing existing structures with the new parking area or driveway on the high height for single tier or 4' in height for retaining wall and its perpendicular distances side. -

SOHO Design in the Near Future
Rochester Institute of Technology RIT Scholar Works Theses 12-2005 SOHO design in the near future SooJung Lee Follow this and additional works at: https://scholarworks.rit.edu/theses Recommended Citation Lee, SooJung, "SOHO design in the near future" (2005). Thesis. Rochester Institute of Technology. Accessed from This Thesis is brought to you for free and open access by RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. Rochester Institute of Technology A thesis Submitted to the Faculty of The College of Imaging Arts and Sciences In Candidacy for the Degree of Master of Fine Arts SOHO Design in the near future By SooJung Lee Dec. 2005 Approvals Chief Advisor: David Morgan David Morgan Date Associate Advisor: Nancy Chwiecko Nancy Chwiecko Date S z/ -tJ.b Associate Advisor: Stan Rickel Stan Rickel School Chairperson: Patti Lachance Patti Lachance Date 3 -..,2,2' Ob I, SooJung Lee, hereby grant permission to the Wallace Memorial Library of RIT to reproduce my thesis in whole or in part. Any reproduction will not be for commercial use or profit. Signature SooJung Lee Date __3....:....V_6-'-/_o_6 ____ _ Special thanks to Prof. David Morgan, Prof. Stan Rickel and Prof. Nancy Chwiecko - my amazing professors who always trust and encourage me sincerity but sometimes make me confused or surprised for leading me into better way for three years. Prof. Chan hong Min and Prof. Kwanbae Kim - who introduced me about the attractive -

Façade-Wall: an Architecture for Knowledge Representation
FAÇADE-WALL: AN ARCHITECTURE FOR KNOWLEDGE REPRESENTATION A THESIS SUBMITTED TO THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES OF MIDDLE EAST TECHNICAL UNIVERSITY BY BENGİSU DEREBAŞI IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARCHITECTURE IN ARCHITECTURE SEPTEMBER 2019 Approval of the thesis: FAÇADE-WALL: AN ARCHITECTURE FOR KNOWLEDGE REPRESENTATION submitted by BENGİSU DEREBAŞI in partial fulfillment of the requirements for the degree of Master of Architecture in Architecture Department, Middle East Technical University by, Prof. Dr. Halil Kalıpçılar Dean, Graduate School of Natural and Applied Sciences Prof. Dr. F. Cânâ Bilsel Head of Department, Architecture Prof. Dr. Ayşen Savaş Supervisor, Architecture, METU Examining Committee Members: Assoc. Prof. Dr. Ela Alanyalı Aral Architecture, METU Prof. Dr. Ayşen Savaş Architecture, METU Assist. Prof. Dr. Esin Kömez Dağlıoğlu Architecture, METU Assist. Prof. Dr. Pelin Yoncacı Arslan Architecture, METU Assist. Prof. Dr. Heves Beşeli Özkoç Architecture, TEDU Date: 09.09.2019 I hereby declare that all information in this document has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all material and results that are not original to this work. Name, Surname: Bengisu Derebaşı Signature: iv ABSTRACT FAÇADE-WALL: AN ARCHITECTURE FOR KNOWLEDGE REPRESENTATION Derebaşı, Bengisu Master of Architecture, Architecture Supervisor: Prof. Dr. Ayşen Savaş September 2019, 104 pages This study aims to track the traces of knowledge in architecture. Architecture, here, refers to the materiality of the knowledge; knowledge, on the other hand, is considered as an abstract concept. -

Privacy Wall & Glass Selections Pivot-Hinged Door
Privacy Wall & Glass Selections Pivot-Hinged Door (For products manufactured after September 14, 2009) 3/16" HEX BIT #2 ACR BIT 3/8" HEX SOCKET O AYB Full-Height Transom Full-Height Transom Full-Height Pair Transom Pair R (No Switch) (No Switch) (With Switch) (With Switch) ETCHED GLASS STYLES: NOTE: For etched/pattern glass orientation please refer to the installation drawings. Unless noted otherwise, use the default. 5/64 HEX PATTERN GLASS STYLES: DEFAULT GLASS ORIENTATION: ETCHED GLASS: 5/32 Rough side to go on the inside of the office space. DRILL BIT PATTERN GLASS: Rough side to go on the outside of the office space. 1" OPEN END If you have a problem, question, or request, call Topic Page WRENCH your local dealer, or Steelcase Line 1 at 888.STEELCASE (888.783.3522) Privacy Wall Pivot-Hinged Door Components 2 for immediate action by people who want to help you. Glass Selections Pivot-Hinged Door Components 3 (Outside the U.S.A., Canada, Mexico, Puerto Rico, and the U.S. Virgin Islands, call: 1.616.247.2500) Pivot-Hinged Door Frame Assembly 4 Or visit our website: www.steelcase.com PLUMB BOB High Voltage Switch Installation (optional) 14 © 2016 Steelcase Inc. Grand Rapids, MI 49501 Low Voltage Switch Installation (optional) 17 U.S.A. Page 1 of 21 Install Hardware on Inactive Leaf (Door Pairs) 18 Printed in U.S.A. 939500492 Rev F Privacy Wall Pivot-Hinged Door Components TRANSOM FRAME DOOR TOP RAIL ASSEMBLY CLAMP CHANNEL (Factory Pre-installed) (Ordered separately from frame unit.) STRIKE PLATE PANEL POST EXTENSION ASSEMBLY Page 2 of -

Retaining Wall
RETAINING WALL City of Brookfield, Wisconsin Inspection Services Department 2000 North Calhoun Rd, Brookfield, WI 53005 Phone 262-796-6646 M-F, 7am - 5pm FAX (262) 796-6702 HERE IS A LIST OF THE MOST OFTEN ASKED QUESTIONS AND ANSWERS REGARDING RETAINING WALLS Q: Do I need a building permit? A: A building permit is not required for the following two types of retaining walls: (1) Edgings less than 6" in height of metal, stone, brick, concrete or timber or other materials around driveways, patios, gardens, flower beds, plantings of trees. (2) Decorative walls not higher than 18" in height and located at least 5' from the lot line used around gardens, plantings, trees, patios or driveways and constructed of natural stone, brick or timbers. All other retaining walls do require a building permit. Q. How much will a permit cost? A. $71.00 with a nonrefundable plan review fee of $40.00 due at application. Q. How do I get a permit? A. Please submit: 1. 2 copies of a PLAN for the retaining wall which should include a cross section of the wall showing method of construction, an elevation and landscape plan. 2. 5 copies of a current SURVEY showing location of the wall, distances from lot lines and drainage provisions. If the wall is at least 5’ off the property line you may use an older survey. A hold harmless agreement must be signed in order to use a survey over one year old. 3. A completed building permit application. Q. Where can the retaining wall be located? A. -

Bin-Wall Brochure
Bin-Wall Retaining Wall System ENGINEERED SOLUTIONS 1 Bin-Wall Retaining Wall System Contech Bin-Walls l Protect against shore or bank erosion. l Build breakwaters to protect dock areas against Gravity-Type Retaining Walls wave action. l Enlarge grade-separated highway or railway rights- Contech® Bin-Walls are a system of adjoining closed-faced of-way. bins that are each 10-feet wide. They are composed of l Prevent erosion under bridge abutments. sturdy, lightweight steel members that are easily bolted l Provide wingwalls on bridge abutments. together at the job site. Backfilled with reasonable care, l Create blast walls for protection at military and they transform the soil mass into an economical gravity-type industrial sites. retaining wall. Because this unique design allows the Bin-Walls to flex against minor, unforeseen ground The benefits of Contech Bin-Walls movements that might damage or destroy rigid-type walls, Bin-Walls are easy to install in difficult or restrictive they have been recognized worldwide for over 60 years as conditions, have a lower initial cost and reduce maintenance economical and effective retaining walls. expenses. They also have greater strength and stability, are Bin-Walls are used to … installed without expensive equipment and can be rapidly assembled with unskilled crews. l Gain right-of-way on highway and railroad projects by either supporting part of the road or holding back an encroaching slope. l Create usable flat areas on municipal, industrial and commercial sites that otherwise would be wasted slopes. Contech Bin-Wall is quick and easy to install. It can be bolted together at the job site or preassembled and moved to the site. -

Politics, Architecture and a Wall
266 Ethics, Development and Donald Trump Politics, Architecture and a Wall ANE GONZALEZ LARA University of New Mexico Following the outcome of a studio that I taught in the US/ The list included defense contractors, architectural firms, and Mexico Border and analyzing other proposals, this paper construction firms.3 studies the consequences and responses that the wall has created amongst architects and designers and questions the JuneJuly, a small architectural office based in Los Angeles role of architects in the definition of geopolitical boundaries. and New York, was included in this list of companies. Jake Matatyaou and Kyle Hovenkotter, JuneJuly’s principals, are INTRODUCTION educators and teach at SCI-Arch and Pratt respectively. Their One might think that when the President of the United States appearance in the list of responders to the call caused some included in his campaign building a great structure, and creat- sudden controversy in the architectural community. ing thousands of jobs in the construction industry, that this would be great news for the architects of the country. But In JuneJuly’s interview with the LA Times reporter Carolina when that structure is a wall dividing two neighbor countries, Miranda, Matatyaou asked “If we begin with the fact that there are more things coming into play than just getting a we’re building a hard border, something physical and mate- wall built. rial and that it will be built, we start with the question, ‘What is an aesthetically, humanitarianly minded thing?” while This situation has caused lots of diverse opinions amongst the Hovenkotter added “I think the nation-state is a kind of out- architects of the country and has challenged the role of archi- dated construct.