Thermal Technology Glossary June 2018 Table of Contents 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Monolayer Graphene Bolometer As a Sensitive Far-IR Detector Boris S
Monolayer graphene bolometer as a sensitive far-IR detector Boris S. Karasik*a, Christopher B. McKitterickb, Daniel E. Proberb aJet Propulsion Laboratory, California Institute of Technology, 4800 Oak Grove Dr., Pasadena, CA USA 91109; bDepts. of Phys. and Appl. Phys., Yale University, 15 Prospect St., BCT 417, New Haven, CT USA 06520 ABSTRACT In this paper we give a detailed analysis of the expected sensitivity and operating conditions in the power detection mode of a hot-electron bolometer (HEB) made from a few µm2 of monolayer graphene (MLG) flake which can be embedded into either a planar antenna or waveguide circuit via NbN (or NbTiN) superconducting contacts with critical temperature ~ 14 K. Recent data on the strength of the electron-phonon coupling are used in the present analysis and the contribution of the readout noise to the Noise Equivalent Power (NEP) is explicitly computed. The readout scheme utilizes Johnson Noise Thermometry (JNT) allowing for Frequency-Domain Multiplexing (FDM) using narrowband filter coupling of the HEBs. In general, the filter bandwidth and the summing amplifier noise have a significant effect on the overall system sensitivity. The analysis shows that the readout contribution can be reduced to that of the bolometer phonon noise if the detector device is operated at 0.05 K and the JNT signal is read at about 10 GHz where the Johnson noise emitted in equilibrium is substantially reduced. Beside the high sensitivity (NEP < 10-20 W/Hz1/2), this bolometer does not have any hard saturation limit and thus can be used for far-IR sky imaging with arbitrary contrast. -

Pixel-Wise Motion Deblurring of Thermal Videos
Pixel-Wise Motion Deblurring of Thermal Videos Manikandasriram S.R.1, Zixu Zhang1, Ram Vasudevan2, and Matthew Johnson-Roberson3 Robotics Institute1, Mechanical Engineering2, Naval Architecture and Marine Engineering3 University of Michigan, Ann Arbor, Michigan, USA 48109. fsrmani, zixu, ramv, [email protected] https://fcav.engin.umich.edu/papers/pixelwise-deblurring Abstract—Uncooled microbolometers can enable robots to see in the absence of visible illumination by imaging the “heat” radiated from the scene. Despite this ability to see in the dark, these sensors suffer from significant motion blur. This has limited their application on robotic systems. As described in this paper, this motion blur arises due to the thermal inertia of each pixel. This has meant that traditional motion deblurring techniques, which rely on identifying an appropriate spatial blur kernel to perform spatial deconvolution, are unable to reliably perform motion deblurring on thermal camera images. To address this problem, this paper formulates reversing the effect of thermal inertia at a single pixel as a Least Absolute Shrinkage and Selection Operator (LASSO) problem which we can solve rapidly using a quadratic programming solver. By leveraging sparsity and a high frame rate, this pixel-wise LASSO formulation is able to recover motion deblurred frames of thermal videos without using any spatial information. To compare its quality against state-of- Fig. 1: An illustration of the proposed motion deblurring algorithm for the-art visible camera based deblurring methods, this paper eval- microbolometers. The top image shows a visible image captured at 30fps with uated the performance of a family of pre-trained object detectors auto exposure. -

Infrared Imaging Video Bolometer with a Double Layer Absorbing Foil
Plasma and Fusion Research: Regular Articles Volume 2, S1052 (2007) Infrared Imaging Video Bolometer with a Double Layer Absorbing Foil Igor V. MIROSHNIKOV, Artem Y. KOSTRYUKOV and Byron J. PETERSON1) St. Petersburg State Technical University, 29 Politechnicheskaya Str., St. Petersburg, 195251, Russia. 1)National Institute for Fusion Science, 322-6 Oroshi-cho, Toki, 509-5292, Japan (Received 30 November 2006 / Accepted 11 August 2007) The object of the present paper is an infrared video bolometer with a bolometer foil consisting of two layers: the first layer is constructed of radiation absorbing blocks and the second layer is a thermal isolating base. The absorbing blocks made of a material with a high photon attenuation coefficient (gold) were spatially separated from each other while the base should be made of a material having high tensile strength and low thermal con- ductance (stainless steel). Such a foil has been manufactured in St. Petersburg and calibratedinNIFSusinga vacuum test chamber and a laser beam as an incident power source. A finite element method (FEM) code was applied to simulate the thermal response of the foil. Simulation results are in good agreement with the experi- mental calibration data. The temperature response of the double layer foil is a factor of two higher than that of a single foil IR video bolometer using the same absorber material and thickness. c 2007 The Japan Society of Plasma Science and Nuclear Fusion Research Keywords: plasma bolometry, infrared imaging bolometer, double layer foil, finite element method simulation DOI: 10.1585/pfr.2.S1052 1. Introduction 2. Double Layer Foil Design and Man- The idea of infrared imaging bolometry is to absorb ufacturing the incident plasma radiation in an ultra thin (1 µm-2.5 µm) The idea of DLF design is shown in Fig. -

Uncooled Microbolometer Detector: Recent Developments at ULIS
OPTO-ELECTRONICS REVIEW 14(1), 25–32 DOI: 10.2478/s11772-006-0004-2 Uncooled microbolometer detector: recent developments at ULIS J.L. TISSOT*, C. TROUILLEAU, B. FIEQUE, A. CRASTES, and O. LEGRAS ULIS, BP 27 – 38113 Veurey-Voroize, France Uncooled infrared focal plane arrays are being developed for a wide range of thermal imaging applications. Fire-fighting, predictive maintenance, process control and thermography are a few of the industrial applications which could take benefit from uncooled infrared detector. Therefore, to answer these markets, a 35-µm pixel-pitch uncooled IR detector technology has been developed enabling high performance 160´120 and 384´288 arrays production. Besides a wide-band version from uncooled 320´240/45 µm array has been also developed in order to address process control and more precisely industrial furnaces control. The ULIS amorphous silicon technology is well adapted to manufacture low cost detector in mass produc- tion. After some brief microbolometer technological background, we present the characterization of 35 µm pixel-pitch detec- tor as well as the wide-band 320´240 infrared focal plane arrays with a pixel pitch of 45 µm. Keywords: uncooled IRFPA, 2D array, MWIR, LWIR, microbolometer, amorphous silicon. 1. Introduction Uncooled infrared detectors are now available for various applications. Their simple operating conditions are similar to those of digital CMOS active pixel sensor (APS) used in some digital cameras. They have already shown their po- tentiality to fulfil many commercial and military applica- tions. One of the key parameters is the low cost achievable with uncooled detectors compared to cooled quantum de- tectors. -
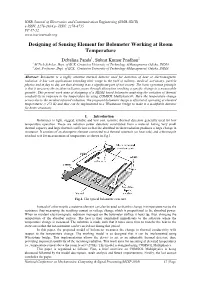
Designing of Sensing Element for Bolometer Working at Room Temperature
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735. PP 47-52 www.iosrjournals.org Designing of Sensing Element for Bolometer Working at Room Temperature 1 2 Debalina Panda , Subrat Kumar Pradhan 1 M.Tech Scholar, Dept. of ECE, Centurion University of Technology &Management, Odisha, INDIA 3 Asst. Professor, Dept. of ECE, Centurion University of Technology &Management, Odisha, INDIA Abstract: Bolometer is a highly sensitive thermal detector used for detection of heat or electromagnetic radiation. It has vast applications extending their range to the field of military, medical, astronomy, particle physics and in day-to-day use thus devising it as a significant part of our society. The basic operation principle is that it measures the incident radiation power through absorption resulting a specific change in a measurable quantity. This present work aims at designing of a MEMS based bolometer analysing the variation of thermal conductivity in response to the temperature by using COMSOL Multiphysics®. Here the temperature change occurs due to the incident infrared radiation. The proposed bolometer design is efficient of operating at elevated temperatures (>273 K) and thus can be implemented in a Wheatstone bridge to make it a modifiable detector for better sensitivity. I. Introduction Bolometer is light, rugged, reliable and low cost resistive thermal detectors generally used for low temperature operation. These are radiation power detectors constructed from a material having very small thermal capacity and large thermal coefficient so that the absorbed incident radiation produces a large change in resistance. It consists of an absorptive element connected to a thermal reservoir (or heat sink) and a thermopile attached to it for measurement of temperature as shown in Fig.1. -

Status of Uncooled Infrared Detector Technology at ULIS, France
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Defence Science Journal Defence Science Journal, Vol. 63, No. 6, November 2013, pp. 545-549, DOI : 10.14429/dsj.63.5753 2013, DESIDOC Status of Uncooled Infrared Detector Technology at ULIS, France J.L. Tissot*, P. Robert, A. Durand, S. Tinnes, E. Bercier, and A. Crastes ULIS, 38113, Veurey-Voroize, France *E-mail: [email protected] ABSTRACT The high level of accumulated expertise by ULIS and CEA/LETI on uncooled microbolometers made from amorphous silicon enables ULIS to develop uncooled infrared focal plane array (IRFPA) with 17 µm pixel-pitch to enable the development of small power, small weight and power and high performance IR systems. Key characteristics of amorphous silicon based uncooled IR detector is described to highlight the advantage of this technology for system operation. A full range of products from 160 x 120 to 1024 x 768 has been developed and we will focus the paper on the ¼ VGA with 17 µm pixel pitch. Readout integrated circuit (ROIC) architecture is described highlighting innovations that are widely on-chip implemented to enable an easier operation by the user. The detector configuration (integration time, windowing, gain, scanning direction), is driven by a standard I²C link. Like most of the visible arrays, the detector adopts the HSYNC/VSYNC free-run mode of operation driven with only one master clock (MC) supplied to the ROIC which feeds back pixel, line and frame synchronisation. On-chip PROM memory for customer operational condition storage is available for detector characteristics. -

Optically-Athermalized Construction Optical Design for the IMACS Short Camera
Optically-athermalized construction optical design for the IMACS Short camera Harland W. Epps1, and Brian M. Sutin2 1 University of California Observatories/Lick Observatory Santa Cruz, California 95064 2 Observatories of the Carnegie Institution of Washington Pasadena, California 91101 ABSTRACT The optical performance of a large, optically fast, all-refracting spectrograph camera is extremely sensitive to potential temperature changes which might occur during an extended single observation, over the duration of an observing run, and/or on seasonal time scales. A small temperature change, even at the level of a few degrees C, will lead to changes in the refractive indices of the glasses and the coupling medium, changes in the lens-element geometries and in the dimensions of the lens cell. These effects combine in a design-speci®c manner to cause potential changes of focus and magni®cation within the camera as well as inherent loss of image quality. We have used an optical design technique originally developed for the Smithsonian Astrophysical Observatory's BINOSPEC1,2 instrument in order to produce a construction optical design for the Carnegie IMACS Short camera. This design combines the above-mentioned temperature-dependent parameter variations in such a way that their net effect upon focus and magni®cation is passively reduced to negligible residuals, without the use of high-expansion plastics, "negative-c.t.e." mechanisms or active control within the lens cell. Simultaneously, the design is optimized for best inherent image quality at any temperature within the designated operating range. The optically-athermalized IMACS Short camera is under construction. We present its quantitative optical design together with our assessment of its expected performance over a (T= -4.0 to +20.0) C temperature range. -
Development of Cryogenic Bolometer for Neutrinoless Double Beta Decay in 124Sn
Development of Cryogenic Bolometer for Neutrinoless Double Beta Decay in 124Sn By Vivek Singh PHYS01200804030 Bhabha Atomic Research Centre, Mumbai – 400 085 A thesis submitted to the Board of Studies in Physical Sciences In partial fulfillment of requirements For the Degree of DOCTOR OF PHILOSOPHY of HOMI BHABHA NATIONAL INSTITUTE October, 2014 Homi Bhabha National Institute Recommendations of the Viva Voce Board As members of the Viva Voce Board, we certify that we have read the dissertation prepared by Vivek Singh entitled “Development of Cryogenic Bolometer for Neutrinoless Double Beta Decay in 124Sn” and recommend that it may be accepted as fulfilling the dissertation requirement for the Degree of Doctor of philosophy. Chairman - Prof. S. L. Chaplot Date: Guide / Convener - Prof. V. Nanal Date: Co-guide - Prof. V. M. Datar Date: Member - Dr. G. Ravikumar Date: Member - Prof. R. G. Pillay Date: Member - Dr. V. Ganesan Date: Final approval and acceptance of this dissertation is contingent upon the candidate’s submission of the final copies of the dissertation to HBNI. I/We hereby certify that I/we have read this dissertation prepared under my/our direction and recommend that it may be accepted as fulfilling the dissertation requirement. Date: Place: Co-guide Guide ii STATEMENT BY AUTHOR This dissertation has been submitted in partial fulfillment of requirements for an advanced degree at Homi Bhabha National Institute (HBNI) and is deposited in the Library to be made available to borrowers under rules of the HBNI. Brief quotations from this dissertation are allowable without special permission, provided that accurate acknowledgement of source is made. -

Enhancing Microbolometer Performance at Terahertz Frequencies with Metamaterial Absorbers
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2013-09 Enhancing microbolometer performance at terahertz frequencies with metamaterial absorbers Kearney, Brian T. Monterey, California: Naval Postgraduate School http://hdl.handle.net/10945/37647 NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA DISSERTATION ENHANCING MICROBOLOMETER PERFORMANCE AT TERAHERTZ FREQUENCIES WITH METAMATERIAL ABSORBERS by Brian T. Kearney September 2013 Dissertation Supervisor: Gamani Karunasiri Approved for public release; distribution is unlimited THIS PAGE INTENTIONALLY LEFT BLANK REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704–0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instruction, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202–4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704–0188) Washington DC 20503. 1. AGENCY USE ONLY (Leave blank) 2. REPORT DATE 3. REPORT TYPE AND DATES COVERED September 2013 Dissertation 4. TITLE AND SUBTITLE 5. FUNDING NUMBERS ENHANCING MICROBOLOMETER PERFORMANCE AT TERAHERTZ FREQUENCIES WITH METAMATERIAL ABSORBERS 6. AUTHOR(S) Brian T. Kearney 7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES) 8. PERFORMING ORGANIZATION Naval Postgraduate School REPORT NUMBER Monterey, CA 93943–5000 9. SPONSORING /MONITORING AGENCY NAME(S) AND ADDRESS(ES) 10. SPONSORING/MONITORING N/A AGENCY REPORT NUMBER 11. SUPPLEMENTARY NOTES The views expressed in this thesis are those of the author and do not reflect the official policy or position of the Department of Defense or the U.S. -
Thz Detectors
THz Detectors John Byrd Short Bunches in Accelerators– USPAS, Boston, MA 21-25 June 2010 Overview • Bolometers • Pyroelectric detectors • Diodes • Golay Cell Short Bunches in Accelerators– USPAS, Boston, MA 21-25 June 2010 Bolometers Bolometer: ORIGIN late 19th cent.: from Greek bolē ‘ray of light’ + -meter In 1878 Samuel Pierpont Langley invented the bolometer, a radiant-heat detector that is sensitive to differences in temperature of one hundred- thousandth of a degree Celsius (0.00001 C) . Composed of two thin strips of metal, a Wheatstone bridge, a battery, and a galvanometer (an electrical current measuring device), this instrument enabled him to study solar irradiance (light rays from the sun) far into its infrared region and to measure the intensity of solar radiation at various wavelengths. Short Bunches in Accelerators– USPAS, Boston, MA 21-25 June 2010 Bolometer principle Short Bunches in Accelerators– USPAS, Boston, MA 21-25 June 2010 Far-IR Silicon bolometer • Spectral response: 2-3000 micron • Operating temperature: 4.2-0.3 deg-K • Responds only to AC signal within detector bandwidth (may need a chopper.) Short Bunches in Accelerators– USPAS, Boston, MA 21-25 June 2010 Pyroelectric Detectors • Ferroelectric materials such as TGS or Lithium Tantalate, exhibit a large spontaneous electrical polarisation which has varies with temperature. • Observed as an electrical signal if electrodes are placed on opposite faces of a thin slice of the material to form a capacitor. • Creates a voltage across the capacitor for a high external impedance • Only sensitive to AC signals (I.e. time-varying) • Room temperature operature • Small detector area can give fast thermal response time. -

Physics with Calorimeters
XIII International Conference on Calorimetry in High Energy Physics (CALOR 2008) IOP Publishing Journal of Physics: Conference Series 160 (2009) 012001 doi:10.1088/1742-6596/160/1/012001 Physics with calorimeters Klaus Pretzl Laboratory of High Energy Physics, University Bern, Sidlerstr.5, CH 3012 Bern, Switzerland E-mail: pretzl@lhep,unibe,ch Abstract. Calorimeters played an essential role in the discoveries of new physics, for example neutral currents (Gargamelle), quark and gluon jets (SPEAR, UA2, UA1 and PETRA), W and Z bosons (UA1, UA2), top quark (CDF, D0) and neutrino oscillations (SUPER-KAMIOKANDE, SNO). A large variety of different calorimeters have been developed covering an energy range between several and 1020 eV. This article tries to demonstrate on a few selected examples, such as the early jet searches in hadron-hadron collisions, direct dark matter searches, neutrino-less double beta decay and direct neutrino mass measurements, how the development of these devices has allowed to explore new frontiers in physics. 1. Historical remarks The American Astronomer Samuel Pierpot Langley has 1878 invented the bolometer in order to measure the infrared radiation of celestial objects [1]. His bolometer consisted of two platinum strips one of which was thermally isolated while the other was exposed to radiation. The exposed strip could be heated due to the absorption of electromagnetic radiation and thus would change its resistance. The two strips were connected to two branches of a Wheatstone bridge which allowed to measure the resistance change of the exposed strip. Therefor a bolometer behaves like a true calorimeter which measures the absorbed energy in form of heat. -

12 Considerations for Thermal Infrared Camera Lens Selection Overview
12 CONSIDERATIONS FOR THERMAL INFRARED CAMERA LENS SELECTION OVERVIEW When developing a solution that requires a thermal imager, or infrared (IR) camera, engineers, procurement agents, and program managers must consider many factors. Application, waveband, minimum resolution, pixel size, protective housing, and ability to scale production are just a few. One element that will impact many of these decisions is the IR camera lens. USE THIS GUIDE AS A REFRESHER ON HOW TO GO ABOUT SELECTING THE OPTIMAL LENS FOR YOUR THERMAL IMAGING SOLUTION. 1 Waveband determines lens materials. 8 The transmission value of an IR camera lens is the level of energy that passes through the lens over the designed waveband. 2 The image size must have a diameter equal to, or larger than, the diagonal of the array. 9 Passive athermalization is most desirable for small systems where size and weight are a factor while active 3 The lens should be mounted to account for the back athermalization makes more sense for larger systems working distance and to create an image at the focal where a motor will weigh and cost less than adding the plane array location. optical elements for passive athermalization. 4 As the Effective Focal Length or EFL increases, the field 10 Proper mounting is critical to ensure that the lens is of view (FOV) narrows. in position for optimal performance. 5 The lower the f-number of a lens, the larger the optics 11 There are three primary phases of production— will be, which means more energy is transferred to engineering, manufacturing, and testing—that can the array.