Chapter 2 Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Green-Function Transform and Wave Propagation
1 The Green-function transform and wave propagation Colin J. R. Sheppard,1 S. S. Kou2 and J. Lin2 1Department of Nanophysics, Istituto Italiano di Tecnologia, Genova 16163, Italy 2School of Physics, University of Melbourne, Victoria 3010, Australia *Corresponding author: [email protected] PACS: 0230Nw, 4120Jb, 4225Bs, 4225Fx, 4230Kq, 4320Bi Abstract: Fourier methods well known in signal processing are applied to three- dimensional wave propagation problems. The Fourier transform of the Green function, when written explicitly in terms of a real-valued spatial frequency, consists of homogeneous and inhomogeneous components. Both parts are necessary to result in a pure out-going wave that satisfies causality. The homogeneous component consists only of propagating waves, but the inhomogeneous component contains both evanescent and propagating terms. Thus we make a distinction between inhomogenous waves and evanescent waves. The evanescent component is completely contained in the region of the inhomogeneous component outside the k-space sphere. Further, propagating waves in the Weyl expansion contain both homogeneous and inhomogeneous components. The connection between the Whittaker and Weyl expansions is discussed. A list of relevant spherically symmetric Fourier transforms is given. 2 1. Introduction In an impressive recent paper, Schmalz et al. presented a rigorous derivation of the general Green function of the Helmholtz equation based on three-dimensional (3D) Fourier transformation, and then found a unique solution for the case of a source (Schmalz, Schmalz et al. 2010). Their approach is based on the use of generalized functions and the causal nature of the out-going Green function. Actually, the basic principle of their method was described many years ago by Dirac (Dirac 1981), but has not been widely adopted. -

Approximate Separability of Green's Function for High Frequency
APPROXIMATE SEPARABILITY OF GREEN'S FUNCTION FOR HIGH FREQUENCY HELMHOLTZ EQUATIONS BJORN¨ ENGQUIST AND HONGKAI ZHAO Abstract. Approximate separable representations of Green's functions for differential operators is a basic and an important aspect in the analysis of differential equations and in the development of efficient numerical algorithms for solving them. Being able to approx- imate a Green's function as a sum with few separable terms is equivalent to the existence of low rank approximation of corresponding discretized system. This property can be explored for matrix compression and efficient numerical algorithms. Green's functions for coercive elliptic differential operators in divergence form have been shown to be highly separable and low rank approximation for their discretized systems has been utilized to develop efficient numerical algorithms. The case of Helmholtz equation in the high fre- quency limit is more challenging both mathematically and numerically. In this work, we develop a new approach to study approximate separability for the Green's function of Helmholtz equation in the high frequency limit based on an explicit characterization of the relation between two Green's functions and a tight dimension estimate for the best linear subspace approximating a set of almost orthogonal vectors. We derive both lower bounds and upper bounds and show their sharpness for cases that are commonly used in practice. 1. Introduction Given a linear differential operator, denoted by L, the Green's function, denoted by G(x; y), is defined as the fundamental solution in a domain Ω ⊆ Rn to the partial differ- ential equation 8 n < LxG(x; y) = δ(x − y); x; y 2 Ω ⊆ R (1) : with boundary condition or condition at infinity; where δ(x − y) is the Dirac delta function denoting an impulse source point at y. -

Waves and Imaging Class Notes - 18.325
Waves and Imaging Class notes - 18.325 Laurent Demanet Draft December 20, 2016 2 Preface In the margins of this text we use • the symbol (!) to draw attention when a physical assumption or sim- plification is made; and • the symbol ($) to draw attention when a mathematical fact is stated without proof. Thanks are extended to the following people for discussions, suggestions, and contributions to early drafts: William Symes, Thibaut Lienart, Nicholas Maxwell, Pierre-David Letourneau, Russell Hewett, and Vincent Jugnon. These notes are accompanied by computer exercises in Python, that show how to code the adjoint-state method in 1D, in a step-by-step fash- ion, from scratch. They are provided by Russell Hewett, as part of our software platform, the Python Seismic Imaging Toolbox (PySIT), available at http://pysit.org. 3 4 Contents 1 Wave equations 9 1.1 Physical models . .9 1.1.1 Acoustic waves . .9 1.1.2 Elastic waves . 13 1.1.3 Electromagnetic waves . 17 1.2 Special solutions . 19 1.2.1 Plane waves, dispersion relations . 19 1.2.2 Traveling waves, characteristic equations . 24 1.2.3 Spherical waves, Green's functions . 29 1.2.4 The Helmholtz equation . 34 1.2.5 Reflected waves . 35 1.3 Exercises . 39 2 Geometrical optics 45 2.1 Traveltimes and Green's functions . 45 2.2 Rays . 49 2.3 Amplitudes . 52 2.4 Caustics . 54 2.5 Exercises . 55 3 Scattering series 59 3.1 Perturbations and Born series . 60 3.2 Convergence of the Born series (math) . 63 3.3 Convergence of the Born series (physics) . -

Summary of Wave Optics Light Propagates in Form of Waves Wave
Summary of Wave Optics light propagates in form of waves wave equation in its simplest form is linear, which gives rise to superposition and separation of time and space dependence (interference, diffraction) waves are characterized by wavelength and frequency propagation through media is characterized by refractive index n, which describes the change in phase velocity media with refractive index n alter velocity, wavelength and wavenumber but not frequency lenses alter the curvature of wavefronts Optoelectronic, 2007 – p.1/25 Syllabus 1. Introduction to modern photonics (Feb. 26), 2. Ray optics (lens, mirrors, prisms, et al.) (Mar. 7, 12, 14, 19), 3. Wave optics (plane waves and interference) (Mar. 26, 28), 4. Beam optics (Gaussian beam and resonators) (Apr. 9, 11, 16), 5. Electromagnetic optics (reflection and refraction) (Apr. 18, 23, 25), 6. Fourier optics (diffraction and holography) (Apr. 30, May 2), Midterm (May 7-th), 7. Crystal optics (birefringence and LCDs) (May 9, 14), 8. Waveguide optics (waveguides and optical fibers) (May 16, 21), 9. Photon optics (light quanta and atoms) (May 23, 28), 10. Laser optics (spontaneous and stimulated emissions) (May 30, June 4), 11. Semiconductor optics (LEDs and LDs) (June 6), 12. Nonlinear optics (June 18), 13. Quantum optics (June 20), Final exam (June 27), 14. Semester oral report (July 4), Optoelectronic, 2007 – p.2/25 Paraxial wave approximation paraxial wave = wavefronts normals are paraxial rays U(r) = A(r)exp(−ikz), A(r) slowly varying with at a distance of λ, paraxial Helmholtz equation -

Fourier Optics
Fourier optics 15-463, 15-663, 15-862 Computational Photography http://graphics.cs.cmu.edu/courses/15-463 Fall 2017, Lecture 28 Course announcements • Any questions about homework 6? • Extra office hours today, 3-5pm. • Make sure to take the three surveys: 1) faculty course evaluation 2) TA evaluation survey 3) end-of-semester class survey • Monday are project presentations - Do you prefer 3 minutes or 6 minutes per person? - Will post more details on Piazza. - Also please return cameras on Monday! Overview of today’s lecture • The scalar wave equation. • Basic waves and coherence. • The plane wave spectrum. • Fraunhofer diffraction and transmission. • Fresnel lenses. • Fraunhofer diffraction and reflection. Slide credits Some of these slides were directly adapted from: • Anat Levin (Technion). Scalar wave equation Simplifying the EM equations Scalar wave equation: • Homogeneous and source-free medium • No polarization 1 휕2 훻2 − 푢 푟, 푡 = 0 푐2 휕푡2 speed of light in medium Simplifying the EM equations Helmholtz equation: • Either assume perfectly monochromatic light at wavelength λ • Or assume different wavelengths independent of each other 훻2 + 푘2 ψ 푟 = 0 2휋푐 −푗 푡 푢 푟, 푡 = 푅푒 ψ 푟 푒 휆 what is this? ψ 푟 = 퐴 푟 푒푗휑 푟 Simplifying the EM equations Helmholtz equation: • Either assume perfectly monochromatic light at wavelength λ • Or assume different wavelengths independent of each other 훻2 + 푘2 ψ 푟 = 0 Wave is a sinusoid at frequency 2휋/휆: 2휋푐 −푗 푡 푢 푟, 푡 = 푅푒 ψ 푟 푒 휆 ψ 푟 = 퐴 푟 푒푗휑 푟 what is this? Simplifying the EM equations Helmholtz equation: -

Convolution Quadrature for the Wave Equation with Impedance Boundary Conditions
Convolution Quadrature for the Wave Equation with Impedance Boundary Conditions a b, S.A. Sauter , M. Schanz ∗ aInstitut f¨urMathematik, University Zurich, Winterthurerstrasse 190, CH-8057 Z¨urich, Switzerland, e-mail: [email protected] bInstitute of Applied Mechanics, Graz University of Technology, 8010 Graz, Austria, e-mail: [email protected] Abstract We consider the numerical solution of the wave equation with impedance bound- ary conditions and start from a boundary integral formulation for its discretiza- tion. We develop the generalized convolution quadrature (gCQ) to solve the arising acoustic retarded potential integral equation for this impedance prob- lem. For the special case of scattering from a spherical object, we derive rep- resentations of analytic solutions which allow to investigate the effect of the impedance coefficient on the acoustic pressure analytically. We have performed systematic numerical experiments to study the convergence rates as well as the sensitivity of the acoustic pressure from the impedance coefficients. Finally, we apply this method to simulate the acoustic pressure in a building with a fairly complicated geometry and to study the influence of the impedance coefficient also in this situation. Keywords: generalized Convolution quadrature, impedance boundary condition, boundary integral equation, time domain, retarded potentials 1. Introduction The efficient and reliable simulation of scattered waves in unbounded exterior domains is a numerical challenge and the development of fast numerical methods ∗Corresponding author Preprint submitted to Computer Methods in Applied Mechanics and EngineeringAugust 18, 2016 is far from being matured. We are interested in boundary integral formulations 5 of the problem to avoid the use of an artificial boundary with approximate transmission conditions [1, 2, 3, 4, 5] and to allow for recasting the problem (under certain assumptions which will be detailed later) as an integral equation on the surface of the scatterer. -

5. GAUSSIAN BEAMS 5.1. Solution to the Wave Equation in Cartesian Coordinates
5. GAUSSIAN BEAMS 5.1. Solution to the wave equation in Cartesian coordinates • Recall the Helmholtz equation for a scalar field U in rectangular coordinates ∇+22UU(r,ωβ) ( rr , ω )( , ω) = 0, (5.1) • β is the wavenumber, defined as β22(rrr,,, ω) = ω µε( ω) − i ωµσ( ω ) ω 2 (5.2) = ni2 (rr,,ω) − ωµσ( ω ) c2 • Assuming lossless medium (σ = 0) and decoupling the vacuum contribution (n =1) from βω(r, ), we re-write Eq. 2 to explicitly show the driving term, ∇+2 ω2 ω =−−22 ωω U(r,,) kU00( r) k n( rr,) 1 U( ,,) (5.3) • k = ω . 0 c 1 • Eq. 3 preserves the generality of the Helmholtz equation. Green’s function, h, (an impulse response) is obtained by setting the driving term to a delta function, ∇+2h(rr,,ω) kh2 ( ωδ) =−(3) ( r) 0 (5.4) = −δδδ( xyz) ( ) ( ) • To solve this equation, we take the Fourier transform with respect to r, 22 −+kh(kk,ωω) k0 h( ,1) =−, (5.5) • k 2 =kk ⋅ . • This equation breaks into three identical equations, for each spatial coordinate, 1 hk( x ,ω) = 22 kkx − 0 (5.6) 11 1 = − 2k000xx kk−+ kk x 2 • To calculate the Fourier transform of Eq. 6, we invoke the shift theorem and the Fourier transform of function 1 , k fk( −→ a) eiax ⋅ fx ( ) 1 (5.7) → ixsign( ) k • Thus we obtain as the final solution 1 hx( ,ω) =⋅> eik0 x ,0 x (5.8) ik0 • The procedure applies to all three dimensions, such that the 3D solution reads ⋅ he(r,ω) ∝ ik0 kr, (5.9) • k is the unit vector, kk = / k . -

Fundamentals of Modern Optics", FSU Jena, Prof
Script "Fundamentals of Modern Optics", FSU Jena, Prof. T. Pertsch, FoMO_Script_2017-10-10s.docx 1 Fundamentals of Modern Optics Winter Term 2017/2018 Prof. Thomas Pertsch Abbe School of Photonics, Friedrich-Schiller-Universität Jena Table of content 0. Introduction ............................................................................................... 4 1. Ray optics - geometrical optics (covered by lecture Introduction to Optical Modeling) .............................................................................................. 15 1.1 Introduction ......................................................................................................... 15 1.2 Postulates ........................................................................................................... 15 1.3 Simple rules for propagation of light ................................................................... 16 1.4 Simple optical components ................................................................................. 16 1.5 Ray tracing in inhomogeneous media (graded-index - GRIN optics) .................. 20 1.5.1 Ray equation ............................................................................................ 20 1.5.2 The eikonal equation ................................................................................ 22 1.6 Matrix optics ........................................................................................................ 23 1.6.1 The ray-transfer-matrix ............................................................................ -

3. Differential Equations
11/1/2011 Partial Differential Equations Almost all the elementary and numerous advanced parts of theoretical physics are formulated in terms of differential equations (DE). Newton’s Laws Maxwell equations Schrodinger and Dirac equations etc. Since the dynamics of many physical systems involve just two derivatives, DE of second order occur most frequently in physics. e.g., d 2 x acceleration in classical mechanics F ma m dt 2 the steady state distribution of heat 2 Ordinary differential equation (ODE) Partial differential equation (PDE) 1 Examples of PDEs • Laplace's eq.: 2 0 occurs in a. electromagnetic phenomena, b. hydrodynamics, c. heat flow, d. gravitation. 2 • Poisson's eq., / 0 In contrast to the homogeneous Laplace eq., Poisson's eq. is non- homogeneous with a source term / 0 The wave (Helmholtz) and time-independent diffusion eqs 22 k 0 These eqs. appear in such diverse phenomena as a. elastic waves in solids, b. sound or acoustics, c. electromagnetic waves, d. nuclear reactors. 2 1 11/1/2011 The time-dependent wave eq., The time-dependent heat equation Subject to initial and boundary Subject to initial and boundary conditions conditions Take Fourier Transform Biharmonic Equation it (x, y, z,w) p'(x, y, z,t)e dt . Boundary value problem per freq • Helmholtz equation . 3 Numerical Solution of PDEs • Finite Difference Methods – Approximate the action of the operators – Result in a set of sparse matrix vector equations – In 3D a discretization will have Nx× Ny× Nz points – Iterative methods such as multigrid give good -

Programming Project in TMA4220, Part 2B: Helmholtz' Equation for Electromagnetic Waves
Programming project in TMA4220, part 2B: Helmholtz’ equation for electromagnetic waves October 5, 2015 In this project you will work with a simplified version of the equations for electromagnetic waves. You will implement a finite element method which simulates Wi-Fi signals propagating from a wireless router. 1 Introduction 3 Let Ω ⊂ R denote a region of space and let R+ = [0; 1). Maxwell’s equations in vacuum are @H r × E = − (1) @t @E r × H = µ " (2) 0 0 @t r · E = 0 (3) r · H = 0 (4) 3 2 2 3 where E : Ω × R+ ! R is the electric field, H : Ω × R+ ! S is the magnetic field (here S = fx 2 R : jxj = 1g 3 is the unit sphere in R ), and µ0 and "0 are the permeability and permittivity in vacuum (both positive constants). Taking the curl on both sides of (1), we get on the left-hand side r × (r × E) = r(r · E) − ∆E = −∆E (the first equality being a standard vector identity, and the second following from (3)), and on the right-hand side @H @(r × H) @2E −∇ × = − = −µ " @t @t 0 0 @t2 (using (2)). Rearranging, we get @2E − c2∆E = 0 (5) @t2 where c = p 1 is the speed of light. The same manipulations of (2) will give µ0"0 @2 H − c2∆H = 0: (6) @t2 Note two things. First, the equations for E and H have been decoupled – they will only “see each other” through the boundary conditions (not specified here). Second, note that even though the above equations are vector equations, the components of E (and H) are decoupled. -

Physics 464/511 Lecture I Fall, 2016 1 Differential Equations
Last Latexed: November 2, 2016 at 16:08 1 464/511 Lecture I Last Latexed: November 2, 2016 at 16:08 2 Physics464/511 LectureI Fall,2016 pipe with Z(z)=0at z = 0 and z = L, or we might require good behavior as z → ±∞. In spherical coordinates we found Legendre’s equation 1 Differential Equations 1 d dΘ m2 sin θ + ℓ(ℓ + 1)Θ − Θ=0, Now it is time to return to differential equations sin θ dθ dθ sin2 θ Laplace’s: ∇2ψ =0 where I have replaced the constant Q by ℓ(ℓ+1) for future convenience. Let d d 2 z = cos θ, so = − sin θ . Then if y(z) := Θ(θ), Poisson’s: ∇ ψ = −ρ/ǫ0 dθ dz Helmholtz: ∇2ψ + k2ψ =0 d dy m2 2 1 ∂ψ 2 Diffusion: ∇ ψ − 2 =0 1 − z + ℓ(ℓ + 1)y − y =0 a ∂t dz dz 1 − z2 2 2 2 1 ∂2 Wave Equation: ψ =0, := ∇ − c2 ∂t2 is another form of Legendre’s equation. We may also write it as Klein-Gordon: 2ψ − µ2ψ =0 2 Schr¨odinger: − ~ (∇2 + V ) ψ − i~ ∂ψ =0 d2y dy m2 2m ∂t 1 − z2 − 2z + ℓ(ℓ + 1) − y =0. dz2 dz 1 − z2 All are of the form Hψ = F , where H is a differential operator which could also depend on ~r, The radial coordinate satisfied R(r) of Bessel’s equation d2R dR ∂ ∂ ∂ ∂ r2 +2r + k2r2 − ℓ(ℓ + 1) R =0 H , , , ,x,y,z,t dr2 dr ∂x ∂y ∂z ∂t and a similar Bessel’s equation arose in cylindrical coordinates. -
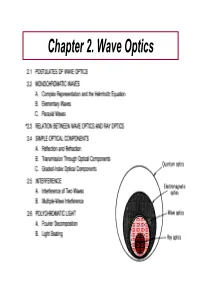
Chapter 2. Wave Optics When Do We Use Wave Optics?
Chapter 2. Wave Optics When do we use Wave Optics? Lih Y. Lin, http://www.ee.washington.edu/people/faculty/lin_lih/EE485/ Optics regimes LENS DESIGN LIGHT DESIGN PHOTON DESIGN ( d >> λ ) ( d ~ λ ) ( d << λ ) Geometrical Optics EM Wave Optics Photonics Ray tracing Wave propagating Photon tunneling 반사/굴절 회절 / 간섭 유도방출 / 유도투과 렌즈 설계 (lens design) 회절격자 설계 나노구조 설계 (nano-tech) 금형 (metal mastering) Wafer mastering Embedded mastering 사출 (injection molding) 복제 (embossing) Nano imprinting 조립 (assembling) 합체 (packaging) 집적 (integrating) 측정 (MTF monitoring) 측정 (extraction effi) 측정 (quantum effi) 기술 Etendue (Δk Δx)(Δk Δx)>1 Diff. Limit ( k x> 1) Uncertainty ( k x > 1) 한계 x x Δ xΔ Δ xΔ Light design (extraction) : field profile, polarization LED Photon design Lens design (e-h combination) (projection) 2-1. Postulates of Wave Optics Wave Equation Intensity, Power, and Energy The optical energy (units of joules) collected in a given time interval is the time integral of the optical power over the time interval. 2.22.2 MONOCHROMATICMONOCHROMATIC WAVESWAVES Complex representation The real function is Harmonic Waves - Period and Frequency - HelmholtzHelmholtz equation equation ( wavenumber ) : Helmholtz equation “The wave equation for monochromatic waves” The optical intensity The intensity of a monochromatic wave does not vary with time. Helmholtz sought to synthesize Maxwell's electromagnetic theory of light with the central force theorem. To accomplish this, he formulated an electrodynamic theory of action at a distance in which electric and magnetic forces were propagated instantaneously. Helmholtz, Hermann von (1821-1894) ElementaryElementary waveswaves ofof HelmholtzHelmholtz eq. eq. Plane Wave : This is the equation describing parallel planes perpendicular to the wavevector k (hence the name “plane wave”).