The Universal Properties of Teichm¨Uller Spaces
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Analytic Vortex Solutions on Compact Hyperbolic Surfaces
Analytic vortex solutions on compact hyperbolic surfaces Rafael Maldonado∗ and Nicholas S. Mantony Department of Applied Mathematics and Theoretical Physics, Wilberforce Road, Cambridge CB3 0WA, U.K. August 27, 2018 Abstract We construct, for the first time, Abelian-Higgs vortices on certain compact surfaces of constant negative curvature. Such surfaces are represented by a tessellation of the hyperbolic plane by regular polygons. The Higgs field is given implicitly in terms of Schwarz triangle functions and analytic solutions are available for certain highly symmetric configurations. 1 Introduction Consider the Abelian-Higgs field theory on a background surface M with metric ds2 = Ω(x; y)(dx2+dy2). At critical coupling the static energy functional satisfies a Bogomolny bound 2 1 Z B Ω 2 E = + jD Φj2 + 1 − jΦj2 dxdy ≥ πN; (1) 2 2Ω i 2 where the topological invariant N (the `vortex number') is the number of zeros of Φ counted with multiplicity [1]. In the notation of [2] we have taken e2 = τ = 1. Equality in (1) is attained when the fields satisfy the Bogomolny vortex equations, which are obtained by completing the square in (1). In complex coordinates z = x + iy these are 2 Dz¯Φ = 0;B = Ω (1 − jΦj ): (2) This set of equations has smooth vortex solutions. As we explain in section 2, analytical results are most readily obtained when M is hyperbolic, having constant negative cur- vature K = −1, a case which is of interest in its own right due to the relation between arXiv:1502.01990v1 [hep-th] 6 Feb 2015 hyperbolic vortices and SO(3)-invariant instantons, [3]. -

Animal Testing
Animal Testing Adrian Dumitrescu∗ Evan Hilscher † Abstract an animal A. Let A′ be the animal such that there is a cube at every integer coordinate within the box, i.e., it A configuration of unit cubes in three dimensions with is a solid rectangular box containing the given animal. integer coordinates is called an animal if the boundary The algorithm is as follows: of their union is homeomorphic to a sphere. Shermer ′ discovered several animals from which no single cube 1. Transform A1 to A1 by addition only. ′ ′ may be removed such that the resulting configurations 2. Transform A1 to A2 . are also animals [6]. Here we obtain a dual result: we ′ give an example of an animal to which no cube may 3. Transform A2 to A2 by removal only. be added within its minimal bounding box such that ′ ′ It is easy to see that A1 can be transformed to A2 . the resulting configuration is also an animal. We also ′ We simply add or remove one layer of A1 , one cube O n present a ( )-time algorithm for determining whether at a time. The only question is, can any animal A be n a configuration of unit cubes is an animal. transformed to A′ by addition only? If the answer is yes, Keywords: Animal, polyomino, homeomorphic to a then the third step above is also feasible. As it turns sphere. out, the answer is no, thus our alternative algorithm is also infeasible. 1 Introduction Our results. In Section 2 we present a construction of an animal to which no cube may be added within its An animal is defined as a configuration of axis-aligned minimal bounding box such that the resulting collection unit cubes with integer coordinates in 3-space such of unit cubes is an animal. -

Space Complexity of Perfect Matching in Bounded Genus Bipartite Graphs
Space Complexity of Perfect Matching in Bounded Genus Bipartite Graphs Samir Datta1, Raghav Kulkarni2, Raghunath Tewari3, and N. Variyam Vinodchandran4 1 Chennai Mathematical Institute Chennai, India [email protected] 2 University of Chicago Chicago, USA [email protected] 3 University of Nebraska-Lincoln Lincoln, USA [email protected] 4 University of Nebraska-Lincoln Lincoln, USA [email protected] Abstract We investigate the space complexity of certain perfect matching problems over bipartite graphs embedded on surfaces of constant genus (orientable or non-orientable). We show that the prob- lems of deciding whether such graphs have (1) a perfect matching or not and (2) a unique perfect matching or not, are in the logspace complexity class SPL. Since SPL is contained in the logspace counting classes ⊕L (in fact in ModkL for all k ≥ 2), C=L, and PL, our upper bound places the above-mentioned matching problems in these counting classes as well. We also show that the search version, computing a perfect matching, for this class of graphs is in FLSPL. Our results extend the same upper bounds for these problems over bipartite planar graphs known earlier. As our main technical result, we design a logspace computable and polynomially bounded weight function which isolates a minimum weight perfect matching in bipartite graphs embedded on surfaces of constant genus. We use results from algebraic topology for proving the correctness of the weight function. 1998 ACM Subject Classification Computational Complexity Keywords and phrases perfect matching, bounded genus graphs, isolation problem Digital Object Identifier 10.4230/LIPIcs.STACS.2011.579 1 Introduction The perfect matching problem and its variations are one of the most well-studied prob- lems in theoretical computer science. -

Quasiconformal Mappings, from Ptolemy's Geography to the Work Of
Quasiconformal mappings, from Ptolemy’s geography to the work of Teichmüller Athanase Papadopoulos To cite this version: Athanase Papadopoulos. Quasiconformal mappings, from Ptolemy’s geography to the work of Teich- müller. 2016. hal-01465998 HAL Id: hal-01465998 https://hal.archives-ouvertes.fr/hal-01465998 Preprint submitted on 13 Feb 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. QUASICONFORMAL MAPPINGS, FROM PTOLEMY'S GEOGRAPHY TO THE WORK OF TEICHMULLER¨ ATHANASE PAPADOPOULOS Les hommes passent, mais les œuvres restent. (Augustin Cauchy, [204] p. 274) Abstract. The origin of quasiconformal mappings, like that of confor- mal mappings, can be traced back to old cartography where the basic problem was the search for mappings from the sphere onto the plane with minimal deviation from conformality, subject to certain conditions which were made precise. In this paper, we survey the development of cartography, highlighting the main ideas that are related to quasicon- formality. Some of these ideas were completely ignored in the previous historical surveys on quasiconformal mappings. We then survey early quasiconformal theory in the works of Gr¨otzsch, Lavrentieff, Ahlfors and Teichm¨uller,which are the 20th-century founders of the theory. -

The Fundamental Polygon 3 3. Method Two: Sewing Handles and Mobius Strips 13 Acknowledgments 18 References 18
THE CLASSIFICATION OF SURFACES CASEY BREEN Abstract. The sphere, the torus, and the projective plane are all examples of surfaces, or topological 2-manifolds. An important result in topology, known as the classification theorem, is that any surface is a connected sum of the above examples. This paper will introduce these basic surfaces and provide two different proofs of the classification theorem. While concepts like triangulation will be fundamental to both, the first method relies on representing surfaces as the quotient space obtained by pasting edges of a polygon together, while the second builds surfaces by attaching handles and Mobius strips to a sphere. Contents 1. Preliminaries 1 2. Method One: the Fundamental Polygon 3 3. Method Two: Sewing Handles and Mobius Strips 13 Acknowledgments 18 References 18 1. Preliminaries Definition 1.1. A topological space is Hausdorff if for all x1; x2 2 X, there exist disjoint neighborhoods U1 3 x1;U2 3 x2. Definition 1.2. A basis, B for a topology, τ on X is a collection of open sets in τ such that every open set in τ can be written as a union of elements in B. Definition 1.3. A surface is a Hausdorff space with a countable basis, for which each point has a neighborhood that is homeomorphic to an open subset of R2. This paper will focus on compact connected surfaces, which we refer to simply as surfaces. Below are some examples of surfaces.1 The first two are the sphere and torus, respectively. The subsequent sequences of images illustrate the construction of the Klein bottle and the projective plane. -

Solving Beltrami Equations by Circle Packing
transactions of the american mathematical society Volume 322, Number 2, December 1990 SOLVING BELTRAMI EQUATIONS BY CIRCLE PACKING ZHENG-XU HE Abstract. We use Andreev-Thurston's theorem on the existence of circle pack- ings to construct approximating solutions to the Beltrami equations on Riemann surfaces. The convergence of the approximating solutions on compact subsets will be shown. This gives a constructive proof of the existence theorem for Beltrami equations. 1. Introduction A circle packing in the plane or in a closed Riemannian 2-manifold of con- stant curvature is a collection of closed round disks with disjoint interiors. The nerve of such circle packing is the embedded graph whose vertices are the centers of the disks and whose edges are the shortest geodesic arcs joining the centers of each pair of intersecting disks. By Andreev-Thurston's theorem, for any tri- 2 2 angulation of the Riemann sphere S , there is a circle packing on S , unique up to a Möbius transformation, whose nerve is isotopic to the 1-skeleton of the triangulation (see [T, Corollary 13.6.2, or MR]). Based on this fact, William P. Thurston suggested a geometric approach to the Riemann mapping theorem. Recently, Burt Rodin and Dennis Sullivan [RS] carried out this ap- proach and verified the convergence of Thurston's scheme. In this paper, we will use this circle packing method to construct approximations to solutions /:fi-»C of the Beltrami equation: (1.1) d,fi(z) = k(z)dzfi(z) a.e. z = x + iyeSi, where Q. is some open Jordan domain in C, and k: Q —>C is some measurable function with (1.2) ||A||00= esssup|A(z)|<l. -

GENERIC DIRICHLET POLYGONS and the MODULAR GROUP by A
GENERIC DIRICHLET POLYGONS AND THE MODULAR GROUP by A. M. MACBEATH Dedicated to Robert Rankin, teacher, colleague and friend on his seventieth birthday 1. Introduction. The concept of "marked polygon", made explicit in this paper, is implicit in all studies of the relationships between the edges and vertices of a fundamental polygon for Fuchsian group, as well as in the topology of surfaces. Once the matching of the edges under the action of the group is known, one can deduce purely combinatorially the distribution of the vertices into equivalence classes, or cycles. Knowing a little more, the order of the rotation group fixing a vertex in each cycle, we can write down a presentation for the group. It was recognized by Poincare that, when we have a polygon which is not a priori associated with a group, but when a matching of its edges is known and certain simple metric conditions, one of which he overlooked, are satisfied, then a group with the given polygon as fundamental polygon can be constructed. This is the celebrated Poincare Existence Theorem, for which a complete satisfactory proof has been published only as recently as 1971, independently by Maskit and de Rham ([6], [12]). If we choose a fixed base-point in the hyperbolic plane, then for every discrete isometry group F we can form the Dirichlet polygon by selecting only those points of the plane which are at minimal distance, among points in the same F-orbit, from p. We then have an edge-matching for this polygon. The distribution of groups in a given isomorph- ism class between the various combinatorially possible edge-matchings is of interest in itself and will probably help us to understand related questions such as the action of the Mapping Class Group on Teichmiiller space. -

Examensarbete on Poincarés Uniformization Theorem Gabriel
Examensarbete On Poincar´esUniformization Theorem Gabriel Bartolini LITH-MAT-EX–2006/14 On Poincar´esUniformization Theorem Applied Mathematics, Link¨opingsUniversitet Gabriel Bartolini LITH-MAT-EX–2006/14 Examensarbete: 20 p Level: D Supervisor: Milagros Izquierdo Barrios, Applied Mathematics, Link¨opingsUniversitet Examiner: Milagros Izquierdo Barrios, Applied Mathematics, Link¨opingsUniversitet Link¨oping: December 2006 Avdelning, Institution Datum Division, Department Date Matematiska Institutionen December 2006 581 83 LINKOPING¨ SWEDEN Spr˚ak Rapporttyp ISBN Language Report category ISRN Svenska/Swedish Licentiatavhandling x Engelska/English x Examensarbete LITH-MAT-EX–2006/14 C-uppsats Serietitel och serienummer ISSN D-uppsats Title of series, numbering Ovrig¨ rapport URL f¨orelektronisk version Titel On Poincar´esUniformization Theorem Title F¨orfattare Gabriel Bartolini Author Sammanfattning Abstract A compact Riemann surface can be realized as a quotient space U/Γ, where U is the sphere Σ, the euclidian plane C or the hyperbolic plane H and Γ is a discrete group of automorphisms. This induces a covering p : U → U/Γ. For each Γ acting on H we have a polygon P such that H is tesselated by P under the actions of the elements of Γ. On the other hand if P is a hyperbolic polygon with a side pairing satisfying certain conditions, then the group Γ generated by the side pairing is discrete and P tesselates H under Γ. Nyckelord Keyword Hyperbolic plane, automorphism, Fuchsian group, Riemann surface, cov- ering, branched covering, orbifold, uniformization, fundamental domain, Poincar´estheorem vi Abstract A compact Riemann surface can be realized as a quotient space U/Γ, where U is the sphere Σ, the euclidian plane C or the hyperbolic plane H and Γ is a discrete group of automorphisms. -

Canonical Polygons for Finitely Generated Fuchsian Groups
CANONICAL POLYGONS FOR FINITELY GENERATED FUCHSIAN GROUPS BY LINDA KEEN The Institute for Advanced Study, Princeton, N.J., U. S. A. 1. Introduction We consider finitely generated Fuchsian groups G. For such groups Fricke defined a class of fundamental polygons which he called canonical. The two most important distinguishing properties of these polygons are that they are strictly convex and have the smallest possible number of sides. A canonical polygon P in Fricke's sense de- pends on a choice of a certain "standard" system of generators S for G. Fricke proved that for a given G and S canonical polygons always exist. His proof is rather com- plicated. Also, Fricke's polygons are not canonical in the technical sense; there are infinitely many P for a given G and S. In this paper, we shall construct a uniquely determined fundamental polygon P which satisfies all of Fricke's conditions for every given G of positive genus and for every given S. We call this P a canonical Fricke polygon. For every given G of genus zero, and S, we shall define a uniquely determined fundamental polygon P which we call a canonical polygon without accidental vertices. From this P, one can obtain in infinitely many ways polygons satisfying l~'ricke's conditions. Our canonical polygons are invariant under similarity transformations of the group G if G is of the first kind. If G is of the second kind, this statement remains true after a suitable modification which will be clear from the construction. The proof involves elementary explicit constructions, and continuity arguments which use quasiconformal mappings, as developed by Ahlfors and Bers. -

Planar Drawings of Higher-Genus Graphs Christian A
Journal of Graph Algorithms and Applications http://jgaa.info/ vol. 15, no. 1, pp. 7{32 (2011) Planar Drawings of Higher-Genus Graphs Christian A. Duncan 1 Michael T. Goodrich 2 Stephen G. Kobourov 3 1Dept. of Computer Science, Louisiana Tech Univ. 2Dept. of Computer Science, Univ. of California, Irvine 3Dept. of Computer Science, University of Arizona Abstract In this paper, we give polynomial-time algorithms that can take a graph G with a given combinatorial embedding on an orientable surface S of genus g and produce a planar drawing of G in R2, with a bounding face defined by a polygonal schema P for S. Our drawings are planar, but they allow for multiple copies of vertices and edges on P's boundary, which is a common way of visualizing higher-genus graphs in the plane. However, unlike traditional approaches the copies of the vertices might not be in perfect alignment but we guarantee that their order along the boundary is still preserved. Our drawings can be defined with respect to either a canonical polygonal schema or a polygonal cutset schema, which provides an interesting tradeoff, since canonical schemas have fewer sides, and have a nice topological structure, but they can have many more repeated vertices and edges than general polygonal cutsets. As a side note, we show that it is NP-complete to determine whether a given graph embedded in a genus-g surface has a set of 2g fundamental cycles with vertex-disjoint interiors, which would be desirable from a graph-drawing perspective. Submitted: Reviewed: Revised: Accepted: December 2009 August 2010 August 2010 August 2010 Final: Published: December 2010 February 2011 Article type: Communicated by: Regular paper D. -
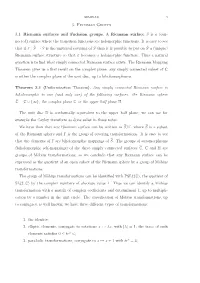
3. Fuchsian Groups
SEMINAR 9 3. Fuchsian Groups 3.1. Riemann surfaces and Fuchsian groups. A Riemann surface S is a (con- nected) surface where the transition functions are holomorphic functions. It is easy to see that if π : S˜ → S is the universal covering of S then it is possible to put on S˜ a (unique) Riemann surface structure so that π becomes a holomorphic function. Thus a natural question is to find what simply connected Riemann surface exists. The Riemann Mapping Theorem gives us a first result on the complex plane: any simply connected subset of C is either the complex plane of the unit disc, up to biholomorphisms. Theorem 3.1 (Uniformization Theorem). Any simply connected Riemann surface is biholomorphic to one (and only one) of the following surfaces: the Riemann sphere C = C ∪ {∞}, the complex plane C or the upper half plane H. b The unit disc D is conformally equivalent to the upper half plane; we can use for example the Cayley transform as done ealier in these notes. We have then that any Riemann surface can be written as S/Γ, where S is a subset of the Riemann sphere and Γ is the group of covering transformate ions. It ise easy to see that the elements of Γ are biholomorphic mappings of S. The groups of automorphisms (biholomorphic self-mappings) of the three simply connectede surfaces C, C and H are groups of M¨obius transformations, so we conclude that any Riemannb surface can be expressed as the quotient of an open subset of the Riemann sphere by a group of M¨obius transformations. -
Fundamental Polygons for Coverings of the Double-Torus
faculteit Wiskunde en Natuurwetenschappen Fundamental Polygons for Coverings of the Double-Torus Bacheloronderzoek Wiskunde Augustus 2011 Student: Jorma Dooper Eerste Begeleider: prof. dr. G. Vegter Contents 1 Introduction 3 2 Hyperbolic Geometry 3 2.1 The Hyperbolic Plane . .4 2.2 The Hyperbolic lines . .5 2.3 The Hyperbolic Isometries . .7 2.4 Hyperbolic polygons . .9 2.5 Side-pairing Transformations . 12 3 Geometric Surfaces 13 3.1 The Euler Characteristic . 13 3.2 Surfaces as Identification Spaces . 14 3.3 Quotient Surfaces . 16 3.4 Covering Surfaces . 17 3.5 Tesselation of the Plane by the Fundamental Polygon . 19 3.6 Group Presentations and Homomorphisms to Finite Cyclic Groups. 20 4 Covering Constructions 21 4.1 Construction of Covering Surfaces for the Double Torus . 22 4.2 Construction of Fundamental Polygons for Subgroups of a Torus Group . 24 4.3 Construction of Fundamental Polygons for Subgroups of a Double Torus Group . 26 4.4 A double covering for the 2-torus . 30 4.5 Dirichlet Polygons for Subgroups of Higher Index . 31 5 Conclusion 34 2 1 Introduction This text is concerned with the construction of fundamental polygons for coverings of finite multiplicity for the double torus, or the orientable surface of genus 2. We will consider the double torus as a geometric surface of constant curvature. We will see that this means that it is locally isometric to the hyperbolic plane and is therefor called a hyperbolic surface. The surfaces we consider are assumed to be connected, compact and orientable. By the classification of compact surfaces, such a surface is always homeomporphic to a sphere with n ≥ 0 handles.