Enhancing Sampling in Computational Statistics [0.2Cm]
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

University of North Carolina at Charlotte Belk College of Business
University of North Carolina at Charlotte Belk College of Business BPHD 8220 Financial Bayesian Analysis Fall 2019 Course Time: Tuesday 12:20 - 3:05 pm Location: Friday Building 207 Professor: Dr. Yufeng Han Office Location: Friday Building 340A Telephone: (704) 687-8773 E-mail: [email protected] Office Hours: by appointment Textbook: Introduction to Bayesian Econometrics, 2nd Edition, by Edward Greenberg (required) An Introduction to Bayesian Inference in Econometrics, 1st Edition, by Arnold Zellner Doing Bayesian Data Analysis: A Tutorial with R, JAGS, and Stan, 2nd Edition, by Joseph M. Hilbe, de Souza, Rafael S., Emille E. O. Ishida Bayesian Analysis with Python: Introduction to statistical modeling and probabilistic programming using PyMC3 and ArviZ, 2nd Edition, by Osvaldo Martin The Oxford Handbook of Bayesian Econometrics, 1st Edition, by John Geweke Topics: 1. Principles of Bayesian Analysis 2. Simulation 3. Linear Regression Models 4. Multivariate Regression Models 5. Time-Series Models 6. State-Space Models 7. Volatility Models Page | 1 8. Endogeneity Models Software: 1. Stan 2. Edward 3. JAGS 4. BUGS & MultiBUGS 5. Python Modules: PyMC & ArviZ 6. R, STATA, SAS, Matlab, etc. Course Assessment: Homework assignments, paper presentation, and replication (or project). Grading: Homework: 30% Paper presentation: 40% Replication (project): 30% Selected Papers: Vasicek, O. A. (1973), A Note on Using Cross-Sectional Information in Bayesian Estimation of Security Betas. Journal of Finance, 28: 1233-1239. doi:10.1111/j.1540- 6261.1973.tb01452.x Shanken, J. (1987). A Bayesian approach to testing portfolio efficiency. Journal of Financial Economics, 19(2), 195–215. https://doi.org/10.1016/0304-405X(87)90002-X Guofu, C., & Harvey, R. -

An Introduction to Data Analysis Using the Pymc3 Probabilistic Programming Framework: a Case Study with Gaussian Mixture Modeling
An introduction to data analysis using the PyMC3 probabilistic programming framework: A case study with Gaussian Mixture Modeling Shi Xian Liewa, Mohsen Afrasiabia, and Joseph L. Austerweila aDepartment of Psychology, University of Wisconsin-Madison, Madison, WI, USA August 28, 2019 Author Note Correspondence concerning this article should be addressed to: Shi Xian Liew, 1202 West Johnson Street, Madison, WI 53706. E-mail: [email protected]. This work was funded by a Vilas Life Cycle Professorship and the VCRGE at University of Wisconsin-Madison with funding from the WARF 1 RUNNING HEAD: Introduction to PyMC3 with Gaussian Mixture Models 2 Abstract Recent developments in modern probabilistic programming have offered users many practical tools of Bayesian data analysis. However, the adoption of such techniques by the general psychology community is still fairly limited. This tutorial aims to provide non-technicians with an accessible guide to PyMC3, a robust probabilistic programming language that allows for straightforward Bayesian data analysis. We focus on a series of increasingly complex Gaussian mixture models – building up from fitting basic univariate models to more complex multivariate models fit to real-world data. We also explore how PyMC3 can be configured to obtain significant increases in computational speed by taking advantage of a machine’s GPU, in addition to the conditions under which such acceleration can be expected. All example analyses are detailed with step-by-step instructions and corresponding Python code. Keywords: probabilistic programming; Bayesian data analysis; Markov chain Monte Carlo; computational modeling; Gaussian mixture modeling RUNNING HEAD: Introduction to PyMC3 with Gaussian Mixture Models 3 1 Introduction Over the last decade, there has been a shift in the norms of what counts as rigorous research in psychological science. -
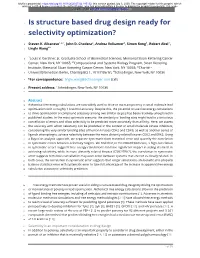
Is Structure Based Drug Design Ready for Selectivity Optimization?
bioRxiv preprint doi: https://doi.org/10.1101/2020.07.02.185132; this version posted July 3, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY 4.0 International license. PrEPRINT AHEAD OF SUBMISSION — July 2, 2020 1 IS STRUCTURE BASED DRUG DESIGN READY FOR 2 SELECTIVITY optimization? 1,2,† 2 3 4 4 3 SteVEN K. Albanese , John D. ChoderA , AndrEA VOLKAMER , Simon Keng , Robert Abel , 4* 4 Lingle WANG Louis V. Gerstner, Jr. GrADUATE School OF Biomedical Sciences, Memorial Sloan Kettering Cancer 5 1 Center, NeW York, NY 10065; Computational AND Systems Biology PrOGRam, Sloan Kettering 6 2 Institute, Memorial Sloan Kettering Cancer Center, NeW York, NY 10065; Charité – 7 3 Universitätsmedizin Berlin, Charitéplatz 1, 10117 Berlin; Schrödinger, NeW York, NY 10036 8 4 [email protected] (LW) 9 *For CORRespondence: †Schrödinger, NeW York, NY 10036 10 PrESENT ADDRess: 11 12 AbstrACT 13 Alchemical FREE ENERGY CALCULATIONS ARE NOW WIDELY USED TO DRIVE OR MAINTAIN POTENCY IN SMALL MOLECULE LEAD 14 OPTIMIZATION WITH A ROUGHLY 1 Kcal/mol ACCURACY. Despite this, THE POTENTIAL TO USE FREE ENERGY CALCULATIONS 15 TO DRIVE OPTIMIZATION OF COMPOUND SELECTIVITY AMONG TWO SIMILAR TARGETS HAS BEEN RELATIVELY UNEXPLORED IN 16 PUBLISHED studies. IN THE MOST OPTIMISTIC scenario, THE SIMILARITY OF BINDING SITES MIGHT LEAD TO A FORTUITOUS 17 CANCELLATION OF ERRORS AND ALLOW SELECTIVITY TO BE PREDICTED MORE ACCURATELY THAN AffiNITY. Here, WE ASSESS 18 THE ACCURACY WITH WHICH SELECTIVITY CAN BE PREDICTED IN THE CONTEXT OF SMALL MOLECULE KINASE inhibitors, 19 CONSIDERING THE VERY SIMILAR BINDING SITES OF HUMAN KINASES CDK2 AND CDK9, AS WELL AS ANOTHER SERIES OF 20 LIGANDS ATTEMPTING TO ACHIEVE SELECTIVITY BETWEEN THE MORE DISTANTLY RELATED KINASES CDK2 AND ERK2. -

Migrating MATLAB®To Python
Migrating MATLAB® to Python Strategies, Comparisons and a Guide to Converting for Experts Migrating MATLAB® to Python Strategies, Comparisons and a Guide to Converting for Experts Alexandre Chabot-Leclerc Enthought, Inc. ©2020 Enthought, Inc. Written by Enthought, Inc. All Rights Reserved. Use only permitted under license. Copying, sharing, redistributing, or other unauthorized use strictly prohibited. All trademarks and registered trademarks are the property of their respective owners. MATLAB and Simulink are registered trademark of The MathWorks, Inc. Enthought, Inc. 200 W Cesar Chavez St Suite 202 Austin, TX 78701 United States www.enthought.com Version 1.2.0 Migrating MATLAB® to Python B Introduction 1 Why Python 2 Diff erences Between Python and MATLAB® 4 Fundamental Data Types 4 Organizing Code in Packages, not Toolboxes 6 Syntax 6 Indexing and Slicing: Why Zero-Based Indexing 8 NumPy Arrays Are Not Matrices 10 Programming Paradigm: Object-Oriented vs. Procedural 13 Anti-Patterns 15 How Do I? 17 Load Data 17 Signal Processing 19 Linear Algebra 19 Machine Learning 20 Statistical Analysis 21 Image Processing and Computer Vision 21 Optimization 22 Natural Language Processing 22 Data Visualization 22 Save Data 25 What Else? 26 Strategies for Converting to Python 27 From the Bottom Up: Converting One Function at a Time 27 From the Top Down: Calling Python from MATLAB® 33 What Next? 37 Acknowledgments 37 Appendix 37 Code Example: Profiling Contiguous Array Operations 37 Complete Version of main.py, in Chapter 4 38 References 39 Accelerate your Python migration with Enthought’s Python for Scientists and Engineers training course! Migrating MATLAB® to Python C Introduction This document will guide you through the transition from MATLAB® to Python. -

Probabilistic Programming in Python Using Pymc3
Probabilistic programming in Python using PyMC3 John Salvatier1, Thomas V. Wiecki2 and Christopher Fonnesbeck3 1 AI Impacts, Berkeley, CA, United States 2 Quantopian Inc, Boston, MA, United States 3 Department of Biostatistics, Vanderbilt University, Nashville, TN, United States ABSTRACT Probabilistic programming allows for automatic Bayesian inference on user-defined probabilistic models. Recent advances in Markov chain Monte Carlo (MCMC) sampling allow inference on increasingly complex models. This class of MCMC, known as Hamiltonian Monte Carlo, requires gradient information which is often not readily available. PyMC3 is a new open source probabilistic programming framework written in Python that uses Theano to compute gradients via automatic differentiation as well as compile probabilistic programs on-the-fly to C for increased speed. Contrary to other probabilistic programming languages, PyMC3 allows model specification directly in Python code. The lack of a domain specific language allows for great flexibility and direct interaction with the model. This paper is a tutorial-style introduction to this software package. Subjects Data Mining and Machine Learning, Data Science, Scientific Computing and Simulation Keywords Bayesian statistic, Probabilistic Programming, Python, Markov chain Monte Carlo, Statistical modeling INTRODUCTION Probabilistic programming (PP) allows for flexible specification and fitting of Bayesian Submitted 9 September 2015 statistical models. PyMC3 is a new, open-source PP framework with an intuitive and Accepted 8 March 2016 readable, yet powerful, syntax that is close to the natural syntax statisticians use to Published 6 April 2016 describe models. It features next-generation Markov chain Monte Carlo (MCMC) Corresponding author Thomas V. Wiecki, sampling algorithms such as the No-U-Turn Sampler (NUTS) (Hoffman & Gelman, [email protected] 2014), a self-tuning variant of Hamiltonian Monte Carlo (HMC) (Duane et al., 1987). -

Modified Hamiltonian Monte Carlo for Bayesian Inference
Modified Hamiltonian Monte Carlo for Bayesian Inference Tijana Radivojević1;2;3, Elena Akhmatskaya1;4 1BCAM - Basque Center for Applied Mathematics 2Biological Systems and Engineering Division, Lawrence Berkeley National Laboratory 3DOE Agile Biofoundry 4IKERBASQUE, Basque Foundation for Science July 26, 2019 Abstract The Hamiltonian Monte Carlo (HMC) method has been recognized as a powerful sampling tool in computational statistics. We show that performance of HMC can be significantly improved by incor- porating importance sampling and an irreversible part of the dynamics into a chain. This is achieved by replacing Hamiltonians in the Metropolis test with modified Hamiltonians, and a complete momen- tum update with a partial momentum refreshment. We call the resulting generalized HMC importance sampler—Mix & Match Hamiltonian Monte Carlo (MMHMC). The method is irreversible by construc- tion and further benefits from (i) the efficient algorithms for computation of modified Hamiltonians; (ii) the implicit momentum update procedure and (iii) the multi-stage splitting integrators specially derived for the methods sampling with modified Hamiltonians. MMHMC has been implemented, tested on the popular statistical models and compared in sampling efficiency with HMC, Riemann Manifold Hamiltonian Monte Carlo, Generalized Hybrid Monte Carlo, Generalized Shadow Hybrid Monte Carlo, Metropolis Adjusted Langevin Algorithm and Random Walk Metropolis-Hastings. To make a fair com- parison, we propose a metric that accounts for correlations among samples and weights, -

Probabilistic Programming
Probabilistic programming Probabilistic programming (PP) is a programming paradigm in which probabilistic models are specified and inference for these models is performed automatically.[1] It represents an attempt to unify probabilistic modeling and traditional general purpose programming in order to make the former easier and more widely applicable.[2][3] It can be used to create systems that help make decisions in the face of uncertainty. Programming languages used for probabilistic programming are referred to as "probabilistic programming languages" (PPLs). Contents Applications Probabilistic programming languages Relational List of probabilistic programming languages Difficulty See also Notes External links Applications Probabilistic reasoning has been used for a wide variety of tasks such as predicting stock prices, recommending movies, diagnosing computers, detecting cyber intrusions and image detection.[4] However, until recently (partially due to limited computing power), probabilistic programming was limited in scope, and most inference algorithms had to be written manually for each task. Nevertheless, in 2015, a 50-line probabilistic computer vision program was used to generate 3D models of human faces based on 2D images of those faces. The program used inverse graphics as the basis of its inference method, and was built using the Picture package in Julia.[4] This made possible "in 50 lines of code what used to take thousands".[5][6] The Gen probabilistic programming library (also written in Julia) has been applied to vision and robotics tasks.[7] More recently, the probabilistic programming systems Turing.jl has been applied in various pharmaceutical and economics applications.[8] Probabilistic programming in Julia has also been combined with differentiable programming by combining the Julia package Zygote.jl with Turing.jl. -

Greta: Simple and Scalable Statistical Modelling in R
greta: simple and scalable statistical modelling in R Nick Golding1 1 School of BioSciences, University of Melbourne DOI: 10.21105/joss.01601 Software • Review Summary • Repository • Archive Statistical modelling is used throughout the sciences. Often, statistical analyses require cus- Submitted: 26 July 2019 tom models that cannot be fitted using off-the shelf statistical software. These models can Published: 12 August 2019 be specified in a statistical syntax and can then be automatically fit to data usingmethods License such as Markov Chain monte Carlo (MCMC) and maximum likelihood. This lets users fo- Authors of papers retain cus on the statistical nature of the model, rather than implementation details and inference copyright and release the work procedures. Since the development of the widely successful WinBUGS (later developed as under a Creative Commons OpenBUGS; Spiegelhalter, Thomas, Best, & Lunn (2014)) a number of alternative software Attribution 4.0 International packages for custom statistical modelling have been introduced, including JAGS, Stan, and License (CC-BY). NIMBLE (Carpenter et al., 2017; de Valpine et al., 2017; Plummer & others, 2003). In these software packages, users typically write out models in a domain-specific language, which is then compiled into computational code. Though see the Python packages PyMC and Edward (Salvatier, Wiecki, & Fonnesbeck, 2016; Tran et al., 2016) in which models are specified in Python code. With increasing quantities of data, complexity, and realism of statistical models that users wish to build with these software, there is a push for software that scales better with data size and model complexity. More recently, custom statistical modelling software has focussed on methods such as Hamiltonian Monte Carlo (rather than Gibbs samplers) in order to improve to computational efficiency. -

Hands-On Bayesian Neural Networks - a Tutorial for Deep Learning Users
Hands-on Bayesian Neural Networks - a Tutorial for Deep Learning Users LAURENT VALENTIN JOSPIN, University of Western Australia WRAY BUNTINE, Monash University FARID BOUSSAID, University of Western Australia HAMID LAGA, Murdoch university MOHAMMED BENNAMOUN, University of Western Australia Modern deep learning methods have equipped researchers and engineers with incredibly powerful tools to tackle problems that previously seemed impossible. However, since deep learning methods operate as black boxes, the uncertainty associated with their predictions is often challenging to quantify. Bayesian statistics offer a formalism to understand and quantify the uncertainty associated with deep neural networks predictions. This paper provides a tutorial for researchers and scientists who are using machine learning, especially deep learning, with an overview of the relevant literature and a complete toolset to design, implement, train, use and evaluate Bayesian neural networks. CCS Concepts: • Mathematics of computing ! Probability and statistics; • Computing methodologies ! Neural networks; Bayesian network models; Ensemble methods; Regularization. Additional Key Words and Phrases: Bayesian methods, Bayesian Deep Learning, Approximate Bayesian methods ACM Reference Format: Laurent Valentin Jospin, Wray Buntine, Farid Boussaid, Hamid Laga, and Mohammed Bennamoun. 2020. Hands-on Bayesian Neural Networks - a Tutorial for Deep Learning Users. ACM Comput. Surv. 1, 1 (July 2020), 35 pages. https://doi.org/10.1145/nnnnnnn.nnnnnnn 1 INTRODUCTION Deep learning has led to a revolution in machine learning, providing solutions to tackle more and more complex and challenging real-life problems. However, deep learning models are prone to overfitting, which adversely affects their generalization capabilities. Deep learning models also tend to be overconfident about their predictions (when they do provide a confidence interval). -

Automatic Differentiation in Machine Learning: a Survey
Automatic Differentiation in Machine Learning: a Survey Atılım G¨une¸sBaydin [email protected] Department of Engineering Science University of Oxford Oxford OX1 3PJ, United Kingdom Barak A. Pearlmutter [email protected] Department of Computer Science National University of Ireland Maynooth Maynooth, Co. Kildare, Ireland Alexey Andreyevich Radul [email protected] Department of Brain and Cognitive Sciences Massachusetts Institute of Technology Cambridge, MA 02139, United States Jeffrey Mark Siskind [email protected] School of Electrical and Computer Engineering Purdue University West Lafayette, IN 47907, United States Abstract Derivatives, mostly in the form of gradients and Hessians, are ubiquitous in machine learn- ing. Automatic differentiation (AD), also called algorithmic differentiation or simply “auto- diff”, is a family of techniques similar to but more general than backpropagation for effi- ciently and accurately evaluating derivatives of numeric functions expressed as computer programs. AD is a small but established field with applications in areas including compu- arXiv:1502.05767v4 [cs.SC] 5 Feb 2018 tational fluid dynamics, atmospheric sciences, and engineering design optimization. Until very recently, the fields of machine learning and AD have largely been unaware of each other and, in some cases, have independently discovered each other’s results. Despite its relevance, general-purpose AD has been missing from the machine learning toolbox, a situ- ation slowly changing with its ongoing adoption under the names “dynamic computational graphs” and “differentiable programming”. We survey the intersection of AD and machine learning, cover applications where AD has direct relevance, and address the main imple- mentation techniques. By precisely defining the main differentiation techniques and their interrelationships, we aim to bring clarity to the usage of the terms “autodiff”, “automatic differentiation”, and “symbolic differentiation” as these are encountered more and more in machine learning settings. -
Tutorial on Probabilistic Programming with Pymc3
185.A83 Machine Learning for Health Informatics 2017S, VU, 2.0 h, 3.0 ECTS Tutorial 02 - 04.04.2017 Tutorial on Probabilistic Programming with PyMC3 [email protected] http://hci-kdd.org/machine-learning-for-health-informatics-course Holzinger Group hci-kdd.org 1 MAKE Health T01 Schedule ▪ 01. Introduction to Probabilistic Programming ▪ 02. PyMC3 ▪ 03. linear regression – the Bayesian way ▪ 04. generalized linear models with PyMC3 Holzinger Group hci-kdd.org 2 MAKE Health T01 01. Introduction and Overview ▪ Probabilistic Programming (PP) ▪ allows automatic Bayesian inference ▪ on complex, user-defined probabilistic models ▪ utilizing “Markov chain Monte Carlo” (MCMC) sampling ▪ PyMC3 ▪ a PP framework ▪ compiles probabilistic programs on-the-fly to C ▪ allows model specification in Python code Salvatier J, Wiecki TV, Fonnesbeck C. (2016) Probabilistic programming in Python using PyMC3. PeerJ Computer Science 2:e55 https://doi.org/10.7717/peerj-cs.55 Holzinger Group hci-kdd.org 3 MAKE Health T01 Properties of Probabilistic Programs ▪ IS NOT ▪ Software that behaves probabilistically ▪ General programming language ▪ IS ▪ Toolset for statistical / Bayesian modeling ▪ Framework to describe probabilistic models ▪ Tool to perform (automatic) inference ▪ Closely related to graphical models and Bayesian networks ▪ Extension to basic language (e.g. PyMC3 for Python) “does in 50 lines of code what used to take thousands” Kulkarni, T. D., Kohli, P., Tenenbaum, J. B. & Mansinghka, V. Picture: A probabilistic programming language for scene perception. in Proceedings of the ieee conference on computer vision and pattern recognition 4390–4399 (2015). Holzinger Group hci-kdd.org 4 MAKE Health T01 Probabilistic Programs ▪ Machine learning algorithms / models often a black box PP “open box” ▪ Simple approach 1. -
Bayesian Analysis with Python
Bayesian Analysis with Python Unleash the power and flexibility of the Bayesian framework Osvaldo Martin BIRMINGHAM - MUMBAI Bayesian Analysis with Python Copyright © 2016 Packt Publishing All rights reserved. No part of this book may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, without the prior written permission of the publisher, except in the case of brief quotations embedded in critical articles or reviews. Every effort has been made in the preparation of this book to ensure the accuracy of the information presented. However, the information contained in this book is sold without warranty, either express or implied. Neither the author nor Packt Publishing, and its dealers and distributors will be held liable for any damages caused or alleged to be caused directly or indirectly by this book. Packt Publishing has endeavored to provide trademark information about all of the companies and products mentioned in this book by the appropriate use of capitals. However, Packt Publishing cannot guarantee the accuracy of this information. First published: November 2016 Production reference: 1211116 Published by Packt Publishing Ltd. Livery Place 35 Livery Street Birmingham B3 2PB, UK. ISBN 978-1-78588-380-4 www.packtpub.com Credits Author Project Coordinator Osvaldo Martin Nidhi Joshi Reviewer Proofreader Austin Rochford Safis Editor Commissioning Editor Indexer Veena Pagare Mariammal Chettiyar Acquisition Editor Graphics Tushar Gupta Disha Haria Content Development Editor Production Coordinator Aishwarya Pandere Nilesh Mohite Technical Editor Cover Work Suwarna Patil Nilesh Mohite Copy Editor Safis Editing Vikrant Phadke About the Author Osvaldo Martin is a researcher at The National Scientific and Technical Research Council (CONICET), the main organization in charge of the promotion of science and technology in Argentina.