Enhancing Automated Water Level Control at Navigable Waterways by High-Resolution Weather Predictions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Karl Drais Born 29.4.1785 in Karlsruhe, Died 10.12.1851 in Karlsruhe. Short Biography Karl Drais, Baptised As Karl Friedrich
Karl Drais born 29.4.1785 in Karlsruhe, died 10.12.1851 in Karlsruhe. Short Biography Karl Drais, baptised as Karl Friedrich Christian Ludwig, Freiherr (= baron) Drais von Sauerbronn first was a forest officer employed by the grand duchy of Baden. Later he became off duty whilst retaining his salary and did start a carer as an inventor. Next to others, he did invent a device to record piano music on paper, then a stenograph using 16 characters, two four-wheeled human powered vehicles and on top of all, the two-wheeled velocipede, also called Draisine or hobby- horse, which he presented first time on June 12th 1817 in Mannheim. This was the first vehicle requiring to keep balance whilst using it as a key principle. It was equipped decades later by Pierre Michaux with pedals to become the modern bicycle and further down the road, the automobile invented by Carl Benz. For his inventions, Grand Duke Carl awarded Drais a pension and appointed him as a professor for mechanic science. His experiments with small rail-road bound vehicles did contribute to the railroad handcar, having even today the German name Draisine. Drais was a fervent democrat, supported the wave of revolutions that swept Europe in 1848, dropping his title and the aristocratic "von" from his name in 1849. After the revolution in Baden had collapsed, Drais became mobbed and ruined by royalists. After his death, Drais's enemies systematically repudiate his invention of horseless moving on two wheels. Karl Drais – the new biography © 2006 ADFC Allgemeiner Deutscher Fahrrad-Club, Kreisverband Mannheim http://www.karl-drais.de The new Biography A new biography of Karl Drais, being the inventor of the velocipde was compiled by Professor Dr. -

The Metropolitan Dimension to European Affairs
METREX Glasgow Spring Conference - 24-26 April 2013 Metropolitan Dimension Preface This Companion to the METREX 2013 Glasgow Conference draws on previous METREX statements and declarations, which are all published in the METREX Manual. This can be downloaded from the METEX web site at www.eurometrex.org They include the Glasgow Founding Declaration of Intent (1996), the Porto Convocation Metropolitan Magna Carta and the Porto Declaration (1999), the Porto Practice Benchmark (1999), the METREX AISBL Statutes (2000), the METREX Practice Benchmark, the Szczecin Conference Declaration (2006) and the Hamburg Conference Declaration (2007). The METREX Manual contains a major section on the Metropolitan Dimension. The Companion has been prepared by METREX as a context document for the METREX Glasgow Spring 2013 Conference, which takes as its theme - The Metropolitan Dimension - The state of the Union. RR/METREX/Glasgow/February 2013 1 The Metropolitan Dimension to European affairs Companion to the METREX 2013 Glasgow Conference METREX The Network of European Metropolitan Regions and Areas 125 West Regent Street Glasgow G2 2SA Scotland UK Phone/fax +44 (0)1292 317074 secretariat @eurometrex.org www.eurometrex.org 2 Defining Metropolitan regions and areas in Europe DG Regional and Urban Policy in co-operation with DG Agriculture and Rural Development, Eurostat, DG Joint Research Centre and OECD Steps towards a Metropolitan Dimension (see page 27) 1 Mass 2 Connectivity 3 Identity 4 Recognition 5 Marketing 6 Influence 7 Support 8 Integrated strategies 9 Collective decision-making and governance 10 Proximity 11 Co-operation 12 Complementarity METREX commends this step-by-step approach to those setting out on the road to effective Metropolitan governance 3 Acknowledgements This Metropolitan Manifesto has drawn on the exemplars of the, • Structuurvisie Amsterdam 2040 (Structural Vision for Amsterdam 2040). -

DB Regio AG Region Rheinneckar Kursbuchstrecke 700 Mannheim
DB Regio AG Kursbuchstrecke 700 Fahrplan 2008 Region RheinNeckar Mannheim - Karlsruhe Streiktage Montag bis Freitag Zugtyp RB RB RB RB RE RB RB RB RB RB RB RB Zugnummer 18709 18601 18651 18603 18653 18605 18657 18607 18609 18611 18613 18615 Von: Biblis Biblis Mannheim Hbf 0:10 4:50 5:27 6:10 6:32 6:50 7:46 8:40 9:40 10:40 11:40 12:40 Mhm-Neckarau 0:14 4:54 5:31 6:14 | 6:54 7:50 8:44 9:44 10:44 11:44 12:44 Mannheim-Rheinau 0:18 4:58 5:35 6:18 | 6:58 7:54 8:48 9:48 10:48 11:48 12:48 Schwetzingen 0:22 5:02 5:39 6:23 6:41 7:02 7:58 8:52 9:52 10:52 11:52 12:52 Oftersheim 0:24 5:04 5:41 6:25 6:43 7:04 8:00 8:54 9:54 10:54 11:54 12:54 Hockenheim 0:29 5:09 5:46 6:30 6:48 7:09 8:04 8:59 9:59 10:59 11:59 12:59 Neulußheim 0:32 5:12 5:49 6:33 | 7:12 8:07 9:02 10:02 11:02 12:02 13:02 Waghäusel o 0:35 5:15 5:52 6:36 6:52 7:15 8:10 9:05 10:05 11:05 12:05 13:05 Waghäusel 0:36 5:16 5:53 6:37 6:53 7:16 8:11 9:06 10:06 11:06 12:06 13:06 Wiesental 0:39 5:18 5:55 6:39 | 7:18 8:13 9:08 10:08 11:08 12:08 13:08 Graben-Neudorf o 0:44 5:24 6:01 6:45 6:58 7:24 8:19 9:14 10:14 11:14 12:14 13:14 Graben-Neudorf 0:45 5:25 6:02 6:46 7:00 7:25 8:20 9:15 10:15 11:15 12:15 13:15 Friedrichstal (Baden) 0:49 5:29 6:06 6:51 | 7:29 8:24 9:19 10:19 11:19 12:19 13:19 Blankenloch 0:53 5:33 6:10 6:54 | 7:33 8:27 9:23 10:23 11:23 12:23 13:23 Karlsr-Hagsfeld 0:57 5:36 6:13 6:58 7:08 7:36 8:31 9:26 10:26 11:26 12:26 13:26 Karlsruhe Hbf o 1:02 5:42 6:20 7:05 7:15 7:42 8:37 9:32 10:32 11:32 12:32 13:32 Nach: 1 von 6 DB Regio AG Kursbuchstrecke 700 Fahrplan 2008 Region RheinNeckar Mannheim -

Karlsruhe University of Education – Pädagogische Hochschule Karlsruhe Address Karlsruhe University of Education, Bismarckstr
Akademisches Auslandsamt International Office Bureau des Relations Internationales Karlsruhe University of Education – Pädagogische Hochschule Karlsruhe Address Karlsruhe University of Education, Bismarckstr. 10, 76133 Karlsruhe, Germany Website www.ph-karlsruhe.de Erasmus Code D KARLSRU02 International Office Address Karlsruhe University of Education Bismarckstr. 10 76133 Karlsruhe GERMANY Office Building III, Room 116 and 117 E-mail [email protected] Fax +49 721 925 4223 Telephone +49 721 925 4221 or 4222 Director International Office Simone Brandt, M.A. +49 721 925 4222 Contact Person for Ex- Ute Fernandez change Students +49 721 925 4221 Background and Mission: The Karlsruhe University of Education in its present form was established in 1962. As a Liberal Arts College, it is a public institution with full university status. The main focus of the insti- tution is on learning processes in different social, cultural and institutional contexts, as well as on teaching and learning in different subject areas and for different age groups. The stu- dents’ needs, the internationalisation of all degree programmes as well as the advancement of international partnerships, are all key features of our profile. From the very first semester, all of our degree programmes offer a high level of integrated prac- tical experiences. Degree Programmes: The university offers degree courses for initial teacher certification for primary and lower secondary schools, as well as, the European Teacher Course (with a strong CLIL "content and language integrated learning" component) for these school types. Over the years, the university has expanded its courses both in terms of academic depth, as well as, in terms of diversity with the introduction of Bachelor degree courses in the fields of "Childhood Education" and "Phys- ical Activity, Health and Recreation". -

RE 4/14 Frankfurt - Mainz - Worms - Ludwigshafen - Mannheim/Karlsruhe Linie 660 Anschluss Zwischen Zwei Zügen Ist in Mainz Hbf Nur Bei Einem Übergang Von Min
RE 4/14 Frankfurt - Mainz - Worms - Ludwigshafen - Mannheim/Karlsruhe Linie 660 Anschluss zwischen zwei Zügen ist in Mainz Hbf nur bei einem Übergang von min. 7 Minuten gesichert. Am 24. und 31.12. Verkehr wie an Samstagen. Montag - Freitag Linie RE 14 RE 4 RE 14 RE 4 RE 4 RE 14 RE 4 RE 4 RE 14 RE 4 RE 4 RE 14 RE 4 RE 4 RE 14 RE 4 RE 14 RE 4 RE 4 RE 4 Zugnummer 4753 4471 4751 14473 4473 4491 29692 4475 4493 14477 4477 4495 14479 4479 4497 4481 4757 4487 29694 4483 Frankfurt, Hauptbahnhof 6.08 7.38 8.38 9.38 10.38 11.38 12.38 13.39 14.38 15.38 16.38 17.38 Frankfurt-Höchst 6.16 7.46 8.46 9.46 10.46 11.46 12.46 13.47 14.46 15.46 16.46 17.46 Hochheim (Main) 6.30 7.58 8.58 9.58 10.58 11.58 12.58 13.58 14.58 15.58 16.58 17.58 Mainz, Hauptbahnhof an 6.43 8.11 9.11 10.11 11.11 12.11 13.11 14.11 15.11 16.11 17.11 18.11 Mainz, Hauptbahnhof ab 5.45 6.52 8.13 9.13 10.13 11.17 12.13 13.17 14.13 15.17 16.13 16.17 17.17 18.13 Mainz, Römisches Theater 16.22 Nierstein 16.32 Oppenheim 16.35 Guntersblum 16.40 Osthofen 6.07 16.45 Worms, Hauptbahnhof an 6.14 7.19 8.39 9.40 10.39 11.44 12.39 13.44 14.39 15.44 16.39 16.52 17.44 18.39 Worms, Hauptbahnhof ab 6.15 7.20 8.40 9.41 10.40 11.45 12.40 13.45 14.40 15.45 16.40 16.53 17.45 18.40 Bobenheim 6.20 7.24 Frankenthal, Hauptbahnhof an 6.24 7.27 8.46 9.46 10.46 11.52 12.46 13.52 14.46 15.52 16.46 16.59 17.52 18.46 Frankenthal, Hauptbahnhof ab 6.25 7.28 8.47 9.47 10.47 11.52 12.47 13.53 14.47 15.52 16.47 17.00 17.52 18.47 Frankenthal, Süd 6.27 7.30 Mannheim, Hauptbahnhof 6.47 Ludwigshafen, Mitte 6.50 Ludwigshafen, -

Roads Lead to Pforzheim. Here Is How You Find Us
All roads lead to Pforzheim. Here is how you find us. Exit Pforzheim Nord Exit Exit Pforzheim Ost Pforzheim West A8 10 294 10 10 294 Pforzheim Motorway National/regional road 463 Railway line Parking Parking facilities are available at Luisenstrasse 4, in the to Westliche Karl-Friedrich-Straße to drop off visitors there. Coaches Sparkasse parking garage. It is about a five-minute walk may neither park nor turn here. from there to TurmQuartier. Stuttgart Airport Arriving by car Pforzheim is located about 45 kilometers from Stuttgart airport. Take Coming from Karlsruhe S-Bahn S2 or S3 to Stuttgart central train station and then continue by Motorway A8 – Exit Pforzheim-West train to Pforzheim. Please follow the B10 towards Pforzheim Zentrum and follow the signs to the Sparkasse parking garage, Karlsruhe/Baden-Baden airport Luisenstraße 4. Pforzheim is located about 60 kilometers from Karlsruhe/Baden-Baden Coming from Stuttgart airport. From here, you take the train via Baden-Baden or Karlsruhe to Motorway A8 – Exit Pforzheim-Ost. Pforzheim. Please follow the B10 towards Pforzheim Zentrum and follow the signs to the Sparkasse parking garage, Luisenstraße 4. Arriving by train Pforzheim is located on the international east/west A8 Pforzheim West Sparkasse Strasbourg-Salzburg axis between Karlsruhe and Stutt- motorway P parking garage gart, and is connected to the Stuttgart and Karlsruhe IC Luisenstraße hubs at hourly intervals. A8 Pforzheim Nord/Ost It is about a five-minute walk from Pforzheim central train motorway Entrance station to TurmQuartier. Kiehnlestr. 20 e K ß iehnles a traße r Entrance t P s f o Museumstr. -

Metropolitan Cities Under Transition: the Example of Hamburg/Germany
Metropolitan Cities under Transition: The Example of Hamburg/Germany Amelie Boje, Ingrid Ott, and Silvia Stiller In the intermediate and long run, energy prices and hence trans- portation costs are expected to increase significantly. According to the reasoning of the New Economic Geography this will strengthen the spreading forces and thus affect the economic landscape. Other influ- encing factors on the regional distribution of economic activity include the general trends of demographic and structural change. In industri- alized countries, the former induces an overall reduction of population and labor force, whereas the latter implies an ongoing shift to the ter- tiary sector and increased specialization. Basically, cities provide better conditions to cope with these challenges than do rural regions. Since the general trends affect all economic spaces similarly, especially city- specific factors have to be considered in order to derive the impact of rising energy costs on future urban development. With respect to Hamburg, regional peculiarities include the overall importance of the harbor as well as the existing composition of the industry and the ser- vice sector. The analysis highlights that rising energy and transporta- tion costs will open up a range of opportunities for the metropolitan region. Key Words: urban development, regional specialization, structural change, demographic change, transportation costs jel Classification: r11; j11 Introduction Decreasing transportation and communication costs which could be ob- served during the last several decades have been a central reason for in- Amelie Boje is visiting research fellow at the Hamburg Institute of International Economics (hwwi),Germany,andpostgraduate student at University College London (ucl),UnitedKingdom. -

5. M. Baye IEF Orsay 6
LIST OF PARTICIPANTS 1. G. Arnolds GHS Wuppertal 2. B. Aune CEN Saclay 3. W. Bauer KfK Karlsruhe 4. F. Baumann Uni Karlsruhe 5. M. Baye IEF Orsay 6. R. Blaschke GHS Wuppertal 7. A. Brandelik KfK Karlsruhe 8. P. Breitfeld KfK Karlsruhe 9. W. Buckel Uni Karlsruhe 10. R. Calder CERN ISR 11. G. Cavallari CERN EF 12. J. Chelius Kawecki Lakewood 13. E. Chiaveri CERN EF 14. A. Citron KFK Karlsruhe 15. M. Dwersteg DESY Hamburg 16. D. Farkas SLAC S tanford 17. 0. Fischer Uni Genf 18. J. Fouan CEN Saclay 19. H. Gerke DESY Hamburg 20. G. Geschonke CERN 21. W. Giebeler Interatom Bergisch Gladbach 22. H.D. Graef GS I Pfungs tadt 23. J. Griffin Fermi-Lab. Batavia 24. Th. Grundey GHS Wuppertal 25. E. Haebel CERN EF 26. H. Hahn BNL Brookhaven 27. J. Halbritter KfK Karlsruhe 28. J. Hasse Uni Karlsruhe 29. H. Heinrichs CERN/Wuppertal 30. W. Herz KfK Karlsruhe 31. B Hillenbrand FL Siemens, Erlangen 32. N. Hilleret CERN ISR 33. H. Hogg SLAC S tanford 34. H. Hubner KfK Karlsruhe 35. S. Isagawa CERN 36. U. Klein GHS Wuppertal P. Kneisel KfK Karlsruhe Y. Kojima KEK Japan W. Krause FL Siemens Erlangen M. Kuntze KfK Karlsruhe R. M. Laszewski Univ. Illinois R. Lehm KfK Karlsruhe W. Lehmann KFK Karlsruhe H. Lengeler CERN EF G. Loew SLAG Sfanford Cl. Lyneis HEPL Stanford A. Mathewson CERN ISR R. Meyer GHS Wuppertal G. Miiller GHS Wuppertal R. Delesclefs Uni Genf V. Nguyen Tuong IEF Orsay Sh. Nogushi Uni INS Tokyo H. Padamsee Univ. -

Karlsruhe - Offenburg - Freiburg (Breisgau) - Müllheim - Basel Rheintalbahn � 702
Kursbuch der Deutschen Bahn 2021 www.bahn.de/kursbuch 702 Karlsruhe - Offenburg - Freiburg (Breisgau) - Müllheim - Basel Rheintalbahn 702 Von Karlsruhe Hbf bis Bühl (Baden) Karlsruher Verkehrsverbund (KVV) RE2 Von Achern bis Ringsheim Verbundtarif Tarifverbund Ortenau (TGO) Von Herbolzheim bis Auggen Verbundtarif Regio-Verkehrsverbund Freiburg (RVF) Von Schliengen bis Basel SBB Verbundtarif Regio Verkehrsverbund Lörrach (RVL) Zug RE RE RB RB RE ICE RE RB RB RE RB SWE RE NJ NJ IC 17033 17035 17151 17153 17001 209 17001 17051 17155 5331 87480 87541 4701 401 471 60471 f f f f f y f f f f f2. 2. f üpr üpr 2. Sa,So Mo-Fr Mo-Sa Mo-Fr Mo-Fr Mo-Fr Mo-Fr Mo-Fr x x Ẅ ẅ Ẇ ẅ ẅ ẇ ẅ km km von Kiel Hbf Ottenhöfen Hamburg Berlin Hbf Berlin Hbf Hbf (tief) (tief) Karlsruhe Hbf 700, 701, 770 ẞẔ ݜ 0 07 ẜẖ 4 04 4 56 ( 5 07 ( 5 07 ( 5 07 0 Rastatt 710.8 ẞẔ ݙ 0 26 Ꭺ 5 10 ᎪᎪᎪ 24 32 Baden-Baden ẞẕ ܙ ẛẕ 0 32 4 25 5 15 ( 5 26 ( 5 26 ( 5 26 Baden-Baden Ꭺ ݚ 0 33 4 27 5 16 ᎪᎪᎪ Bühl (Baden) Ꭺ ݘ 0 41 Ꭺ 5 22 ᎪᎪᎪ 44 ᎪᎪᎪ 27 5 15 5 ܥ Achern 717 ẞẕ ݙ 0 48 Ꭺ 53 59 Renchen 0 53 Ꭺ ܥ 5 19 5 31 ᎪᎪᎪ ᎪᎪᎪ 35 5 24 5 ܥ Appenweier 718, 719 ݚ 0 57 Ꭺ 65 46 5 ) 46 5 ) 46 5 ) 40 5 31 5 ܥ 49 4 01 1 ܙ Offenburg 718, 719, 720, 721 ݚ 73 Offenburg ܥ 1 07 ܥ 4 23 4 51 ẅ 5 11 ᎪᎪᎪ 86 Friesenheim (Baden) ܥᎪ ܥ 4 31 Ꭺ ܥ 5 19 ᎪᎪᎪ ᎪᎪᎪ 23 5 ܥ Ꭺ 35 4 ܥ 16 1 ܥ Lahr (Schwarzw) ݙ 91 99 Orschweier ܥ 1 21 ܥ 4 40 Ꭺ ܥ 5 28 ᎪᎪᎪ 102 Ringsheim ܥ 1 24 ܥ 4 43 Ꭺ ܥ 5 31 ᎪᎪᎪ 105 Herbolzheim (Breisg) ܥ 1 27 ܥ 4 47 Ꭺ ܥ 5 34 ᎪᎪᎪ 108 Kenzingen ܥ 1 30 ܥ 4 50 Ꭺ ܥ 5 38 ᎪᎪᎪ ᎪᎪᎪ 42 5 ܥ Ꭺ 54 4 ܥ 35 1 ܥ Riegel-Malterdingen 723 -

2020 07 Broschuere Forschen
RESEARCH TOPICS IN DETAIL The airtight containers contain colourful punching plates. as charged particles. However, the internal processes are They are made from magnesium, calcium or sodium ele- complex. “Even experts like us have not yet fully figured ments that could play an important role in the batteries out what exactly is happening inside”, says Ehrenberg. of the future. Here in the lab, they are tested for suitabili- ty. “It is one of many areas we work in”, says Ulm-based This is also true of the well-known lithium ion technology. Energy Professor Dr. Maximilian Fichtner, Scientific Spokesperson Although the capacity and number of charging cycles have for CELEST, Europe’s largest research platform for electro- now increased to a high level and the costs are reasona- chemical energy storage. ble, scientists are puzzled for example by what is referred to as an ‘interfacial layer’ that develops in the lithium ion Since 2018, CELEST has pooled the expertise of three battery when a small quantity of the electrolyte corrodes CELEST major research institutions in Baden-Württemberg. They on an electrode. Researchers from CELEST are working to are Karlsruhe Institute of Technology (KIT), Ulm University understand this phenomenon, which determines battery and the Center for Solar Energy and Hydrogen Research quality and is also important for service life. (ZSW) in Ulm, which also operates Europe’s largest pi- lot plant for battery cell manufacture. These partners also Even though lithium ion technology is in use around the work together in the Post Lithium Storage (POLiS) Clus- globe, it does have disadvantages, as one of its main com- ter of Excellence, which has a significant influence on ponents is still cobalt. -

Karlsruhe Im STÄDTERANKING 2019
Karlsruhe im STÄDTERANKING 2019 Zentrale Ergebnisse HINTERGRUND Deutsche Großstädte sind nicht nur zentrale Lebensräume für viele Menschen, sondern auch wichtige Wirtschaftsräume. In den 71 Großstädten lebt mit knapp 26,4 Millionen Menschen fast ein Drittel der Bevölkerung. Sie sind Arbeitsort für 17,2 Millionen Erwerbstätige, wodurch in den Städten ein erhebliches Maß des Wohlstands erwirtschaftet wird. Zugleich gehen von hier starke Ausstrahlungseffekte und Impulse für Innovationen aus. Die Zukunft liegt in der Stadt: Als Heimat zukunftsträchtiger Industrien und Branchen wie der Kultur- und Kreativwirtschaft sind Städte der Schlüssel für eine wettbewerbsfähige Wirtschaft . Megatrends wie die Digitalisierung, Vernetzung und Wissensintensivierung führen zu einem stetigen Wandel in Wirtschaft und Gesellschaft. Um für die Zukunft gerüstet zu sein, ist der Ausbau der digitalen Netze in den deutschen Großstädten von elementarer Bedeutung. Er bildet die Grundlage, damit Unternehmen überhaupt von den Möglichkeiten der Megatrends in der digitalen Welt profitieren können. In diesem Kontext gilt es zudem, junge, technologieorientierte Unternehmen durch eine aktive Gründungsförderung bei der Umsetzung ihrer Ideen zu unterstützen. Aber auch etablierte Unternehmen müssen stetig ihre Unternehmensstrategien anpassen und Innovationsaktivitäten ausbauen, um von den neuen Möglichkeiten zu profitieren. Zur Orientierung lohnt ein Blick über die deutschen Grenzen hinaus, wo digitale Vorreiter wie Malmö oder Tallin auf dem Weg zur Stadt der Zukunft sind. Das Städteranking bildet all diese Facetten ab und zeigt, wo die Großstädte auf dem Weg in die Zukunft stehen. 1 UNTERSUCHUNG Wie lebt und arbeitet es sich in deutschen Großstädten? Die drei Partner IW Consult, Wirtschaftswoche und ImmobilienScout24 nutzen eine umfassende Indikatorenbasis, um dieser Frage auf den Grund zu gehen. -
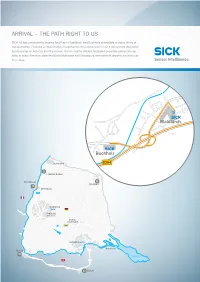
Arrival – the Path Right to Us
ARRIVAL – THE PATH RIGHT TO US SICK AG has conveniently located facilities in Waldkirch and Buchholz accessible to many forms of transportation. Freiburg Central Station (Hauptbahnhof) is about 20 km (12.4 miles) from Waldkirch and is a stop on Intercity and ICE routes. The A5 nearby (Karlsruhe/Basel) provides connection op- tions in every direction. Both the Basel-Mulhouse and Strasbourg international airports are about an hour away. P Waldkirch Buchholz B294 ARRIVAL BY: TRAIN AIRPLANE Switch trains to the S-Bahn to Elzach at Freiburg Central Basel-Mulhouse EuroAirport (Switzerland/France) Station (Breisgau) and continue on to the Waldkirch sta- If you want to go to the Freiburg bus station (next to the tion. From that station, you can reach the SICK Waldkirch central station) via SBG airbus, check out on the French location by taxi or on foot in about 15 minutes. side. www.euroairport.com CAR Strasbourg International Airport (France) SICK Zentrale www.strasbourg.aeroport.fr The fastest option is to follow the A5 from Karlsruhe or Ba- sel. Take the Freiburg-Nord exit off the autobahn and then Zürich Airport (Switzerland) continue on the B294 towards Waldkirch to the Waldkirch- www.flughafen-zuerich.ch West exit. Turn right after exiting off the B294. Starting at the Waldkirch city limits, follow the signs for SICK AG. Frankfurt Airport (Germany) www.frankfurt-airport.de SICK Distribution Center The fastest option is to follow the A5 from Karlsruhe or Ba- Karlsruhe/Baden-Baden Airport (Germany) sel. Take the Freiburg-Nord exit off the autobahn and then www.baden-airpark.de continue on the B294 towards Waldkirch to the Waldkirch- West exit.