Proquest Dissertations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Document Title
Yale University Design Standards 15815 CONTENTS A. Summary Metal Ducts B. System Design and Performance Requirements C. Materials This document provides design standards D. Installation Guidelines only, and is not intended for use, in whole E. Quality Control—Ductwork Field Tests or in part, as a specification. Do not copy F. Cleaning and Adjusting this information verbatim in specifications or in notes on drawings. Refer questions and comments regarding the content and use of this document to the Yale University Project Manager. A. Summary This section contains design criteria for rectangular and round metal ductwork, duct liners, and hangers for supply, return, and exhaust systems. B. System Design and Performance Requirements 1. Keep the ductwork layout simple. Use short, direct runs where ever possible, and conserve ceiling space. 2. All return/exhaust air must be ducted. The use of ceiling plenums for return/exhaust air is prohibited. 3. Perchloric acid fume exhaust ductwork must be individually ducted without connection to other exhausts. 4. Fume hoods and contaminated or hazardous areas must be exhausted by a system of ducts entirely separate from all other exhaust systems. The location of area exhausts should be carefully coordinated with reference to remoteness from supply air outlets, doors, and windows. Animal areas and toilet rooms shall have separate exhausts. See Section 00705: General HVAC Design Conditions. 5. Wherever possible, exhaust ducts carrying noxious or corrosive fumes must be under negative pressure; connect them on the suction side of the fan. 6. Review appropriate SMANCA sections (laboratory) when designing duct distribution systems. Subdivision 15800: Air Distribution 1 Revision 2, 05/13 Yale University Design Standards Section 15815: Metal Ducts 7. -

End of Section 23 31 14
University of Houston Master Construction Specifications Insert Project Name SECTION 23 31 14 - DUCTWORK ACCESSORIES PART 1 - GENERAL 1.1 RELATED DOCUMENTS: A. The Conditions of the Contract and applicable requirements of Division 1, "General Requirements", and Section 23 01 00, "Mechanical General Provisions", govern this Section. 1.2 DESCRIPTION OF WORK: A. Work Included: Provide ductwork accessories as shown on the Drawings, specified and required. B. Types: The types of ductwork accessories required for the project include, but are not limited to: 1. Flexible connections. 2. Direction and volume control dampers. 3. Fire dampers. 4. Fire/smoke dampers. 5. Smoke Dampers. 6. Radiation dampers. 7. Flashing and counterflashing. 8. Turning vanes. 9. Duct access doors and inspection plates. 10. Test openings. 11. Screens. 12. Miscellaneous ductwork materials. 1.3 QUALITY ASSURANCE: A. SMACNA Compliance: Comply with applicable portions of Sheet Metal and Air Conditioning Contractors' National Association (SMACNA) "HVAC Duct Construction Standards", current edition. B. ASHRAE Standards: Comply with American Society of Heating, Refrigerating, and Air-Conditioning Engineers, Inc. (ASHRAE) recommendations pertaining to construction of ductwork accessories, except as otherwise indicated. C. Certification: Fire, fire/smoke and smoke dampers shall be UL-listed, FM-approved and comply with applicable building code requirements. D. Manufacturers: Provide products complying with the specifications and produced by one of the following: 1. American Foundry. 2. Air Balance Inc. 3. Duro-Dyne. 4. Elgin Sheet Metal Products. 5. Nailor Industries. 6. Prefco. 7. Ruskin. 8. Tuttle and Bailey. 9. United Sheet Metal. 10. Vent-Fabrics, Inc. 11. Ventlok. 12. Young Regulator Co. 1.4 SUBMITTALS: AE Project Number: Ductwork Accessories 23 31 14 – 1 Revision Date: 1/29/2018 University of Houston Master Construction Specifications Insert Project Name A. -

Torque Converter. Human Engineering Institute, Cleveland, Ohio Report Number Am-2-5 Pub Date 15 May 67 Edrs Price Mf-$0.25 Hc-$2.04 49P
REPORT RESUMES ED 021 106 VT 005 689 AUTOMOTIVE DIESEL MAINTENANCE 2. UNIT V, AUTOMATIC TRANSMISSIONS--TORQUE CONVERTER. HUMAN ENGINEERING INSTITUTE, CLEVELAND, OHIO REPORT NUMBER AM-2-5 PUB DATE 15 MAY 67 EDRS PRICE MF-$0.25 HC-$2.04 49P. DESCRIPTORS- *STUDY GUIDES, *TEACHING GUIDES, TRADE AND INDUSTRIAL EDUCATION, *AUTO MECHANICS (CCUPATION), *EQUIPMENT MAINTENANCE, DIESEL MATERIALS, INDIVIDUAL INSTRUCTION, INSTRUCTIONAL FILMS, PROGRAMED INSTRUCTON, KINETICS, MOTOR VEHICLES, THIS MODULE OF A 25-MODULE COURSE IS DESIGNED TO DEVELOP AN UNDERSTANDING OF THE OPERATION AND MAINTENANCE OF TORQUE CONVERTERS USED ON DIESEL POWERED VEHICLES. TOPICS ARE (1) FLUID COUPLINGS (LOCATION AND PURPOSE),(2) PRINCIPLES OF OPERATION,(3) TORQUE CONVERRS,(4) TORQMATIC CONVERTER, (5) THREE STAGE, THREE ELEMENT TORQUE CONVERTER, AND (6) TORQUE CONVERTER MAINTENANCE AND TROUBLESHOOTING. THE MODULE CONSISTS OF A SELF-INSTRUCTIONAL PROGRAM TRAINING FILM "LEARNING ABOUT TORQUE CONVERTERS" AND OTHER MATERIALS. SEE VT 005 685 FOR FURTHER INFORMATION. MODULES IN THIS SERIES ARE AVAILABLE AS VT 005 685- VT 005 709. MODULES FOR "AUTOMOTIVE DIESEL MAINTENANCE 1" ARE AVAILABLE AS VT 005 655 VT 005 684. THE 2-YEAR PROGRAM OUTLINE FOR "AUTOMOTIVE DIESEL MAINTENANCE 1 AND 2" IS AVAILABLE AS VT 006 006. THE TEXT MATERIAL, TRANSPARENCIES, PROGRAMED TRAINING FILM, AND THE ELECTRONIC TUTOR MAY BE RENTED (FOR $1.75 PER WEEK) OR PURCHASED FROM THE HUMAN ENGINEERING INSTITUTE HEADQUARTERS AND DEVELOPMENT CETER, 2341 CARNEGIE AVENUE: CLEVELAND, 'OHM 44115. (HC) STUDY AND READING MATERIALS AUTOMOTIVE MAINTENANCE L_____ AUTOMATIC TRANSMISSIONS- TORQUE CONVERTER UNIT V SECTION A FLUID COUPLINGS (LOCATION AND PURPOSE) SECTION B PRINCIPLE OF OPERATION SECTION C TORQUE CONVERTERS SECTION D TORQMATIC CONVERTER SECTION E THREE STAGE, THREE ELEMENT TORQUE CONVERTER. -

CHAVEZ-DISSERTATION-2016.Pdf
Copyright by Kyle Feliciano Chavez 2016 The Dissertation Committee for Kyle Feliciano Chavez certifies that this is the approved version of the following dissertation: Variable Incidence Angle Film Cooling Experiments on a Scaled Up Turbine Airfoil Model Committee: David G. Bogard, Supervisor Frederick Todd Davidson Atul Kohli Ofodike A. Ezekoye Michael E. Webber Variable Incidence Angle Film Cooling Experiments on a Scaled Up Turbine Airfoil Model by Kyle Feliciano Chavez, B.S.; M.S. Dissertation Presented to the Faculty of the Graduate School of The University of Texas at Austin in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy The University of Texas at Austin May 2016 Dedication This document is dedicated to my family. Dad, you have always been so encouraging, helpful, and levelheaded. If not for all of your help and encouragement, I’m not sure I’d be where I’m at today. To my brother, I’m so happy for the years we spent growing up together. They are some of my fondest memories and I’ll never forget them. Mom, if you were still here today, you’d be so proud. I think of you all constantly, and I love you all. Acknowledgements I would like to first and foremost thank Dr. Bogard, who has supported and taught me so much along the way. Your dedication to your field of research is an inspiration to me, and you’ve helped shape me in to the engineer I am today. You also taught me how great it is to be “mighty fine” all the time, and that’s priceless in and of itself. -

Gm Livonia Trim Plant in Livonia, Michigan ______10
Repurposing Former Automotive Manufacturing Sites in the Midwest A report on what communities have done to repurpose closed automotive manufacturing sites, and lessons for Midwestern communities for repurposing their own sites. Prepared by: Valerie Sathe Brugeman, MPP Kristin Dziczek, MS, MPP Joshua Cregger, MS Prepared for: The Charles Stewart Mott Foundation June 2012 Repurposing Former Midwestern Automotive Manufacturing Sites A report on what communities have done to repurpose closed automotive manufacturing sites, and lessons for Midwestern communities for repurposing their own sites. Report Prepared for: The Charles Stewart Mott Foundation Report Prepared by: Center for Automotive Research 3005 Boardwalk, Ste. 200 Ann Arbor, MI 48108 Valerie Sathe Brugeman, MPP Kristin Dziczek, MS, MPP Joshua Cregger, MS Repurposing Former Midwestern Automotive Manufacturing Sites Table of Contents ACKNOWLEDGMENTS _____________________________________________________________ III About the Center for Automotive Research ______________________________________________ iii EXECUTIVE SUMMARY _____________________________________________________________ 4 Case Studies ______________________________________________________________________ 5 Key Findings _______________________________________________________________________ 5 INTRODUCTION __________________________________________________________________ 7 METHODOLOGY __________________________________________________________________ 7 GM LIVONIA TRIM PLANT IN LIVONIA, MICHIGAN _______________________________________ -

23.31.00 Ductwork
UNIVERSITY OF PENNSYLVANIA Design Standards Revision July 2019 SECTION 233100 – DUCTWORK 1.0 Acoustical duct lining in any part of the duct system is prohibited. All ductwork requiring insulation shall be externally insulated (Refer to the Sheet Metal Ductwork Insulation Schedule in Section 230700 for insulation types and thickness). Double walled ducts consisting of an outer wall of galvanized sheet metal, an inner wall of perforated galvanized sheet metal with insulation sandwiched between the layers is permitted. 2.0 All ductwork shall be designed, constructed, supported and sealed in accordance with SMACNA HVAC Duct Construction Standards and pressure classifications. When the ductwork pressure classification of these standards is exceeded, construct ductwork in accordance with SMACNA Round and Rectangular Industrial Duct Construction Standards. The following preferences or modifications to the Standards shall be specified: A. Radius elbows with a construction radius of 1.5 the duct width are preferred to square elbows. B. All square elbows must be constructed with single thickness turning vanes, Runner Type 2 as shown in Figures 4-3 and 4-4 of SMACNA Duct Construction Standards - Metal and Flexible. Where a rectangular duct changes in size at a square-throat elbow fitting, use single thickness turning vanes with trailing edge extensions aligned with the sides of the duct. C. Air extractors and splitter dampers are not permitted. D. Transitions and offsets shall follow Figure 4-7 of SMACNA HVAC Duct Construction Standards - Metal and Flexible, except that sides of transitions shall slope a maximum of 15 degrees. E. Minimum duct gauge shall be 22 for ducts up through 43", 20 gauge up through 60" and 18 gauge above 60". -
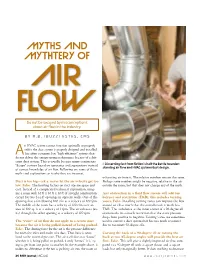
Myths and Mythtery of Air Flow Do Not Be Swayed by Misconceptions About Air Flow in the Industry
Myths And Mythtery of Air Flow Do not be swayed by misconceptions about air flow in the industry. By R.B. (Buzz) Est E s , C M s n HVAC system cannot function optimally or properly unless the duct system is properly designed and installed. AToo often customers buy “high efficiency” systems that do not deliver the energy-saving performance because of a defi- cient duct system. This is usually because many contractors “design” systems based on ignorance and superstition instead Discerning fact from fiction is half the battle to under- of correct knowledge of air flow. Following are some of these standing air flow and HVAC system/duct design. myths and explanations as to why they are incorrect. exhausting air from it. The relative numbers remain the same. Duct is too big—a.k.a. never let the air velocity get too Perhaps some numbers might be negative, relative to the air low. False. The limiting factors on duct size are space and outside the room, but that does not change any of the math. cost. Instead of a complicated technical explanation, imag- ine a room with 10 ft x 10 ft x 10 ft of air-tight construction Any obstruction in a fluid flow stream will add tur- except for two 1-sq.-ft openings in opposite walls. One of the bulence and restriction (T&R), this includes turning openings has a fan blowing 100 cfm at a velocity of 100 fpm. vanes. False. Installing turning vanes can improve the flow The middle of the room has a velocity of 100 cfm over an around an ell so much that the overall result is much less area of 100 sq. -

Torrance Press
• AUTOMOBILES 200 AUTOMOBILES 200« AUTOMOBILES 200 FOB SALE FOB SALE FOB SALE • AUTOMOBILES 200 • AUTOMOBILES 200 • AUTOMOBILES 200 AUTOMOBILES 2001 • AUTOMOBIL _S 200 HARBOR Inventory Reduction FOR SALE FOR SALE FOR SALE FOB SALE I FOB SALE MOTORS SALE GOAL POST We Are Getting Ready 956 For Our New Models! SPECIALS 100% FINANCING "ORD (On Approved Credit) '55 OLDS 1955 PONTIAC STAR CHIEF . $2295 «* Holiday nedan. Ra dio *. heater, hydra- Catalina, 2-door, hard top, radio, heater, hydramatic, power. mati'-, 2-tone. tinted KlaJM. white wall*, lota of extraa. 1955 BUICK 4-DOOR . ... $2195 Riviera Special. Radio, heater, Dynaflow, whitewall tires, dual spots and $2595 continental kit, ate. 1954 BUICK SUPER ........ $1995 Convertible coup*. Radio, heater, Dynaflow, whitewall tires & full power. DEMO'S 1953 FORD VICTORIA . $1095 Radio & heater, overdrive, cont. kit, 2-ton* paint. Sharp! SPECIALS 1953 CHEVROLET-BEL-AIR CONVERTIBLE CPE............... $1095 1955 CHEVROLET BEL-AIR V-8, Loaded .................................... $ I 795 1954 WILLYS 4-DOOR .......................................... Payments $30 a Mo. '54 OLDS 1951 FORD CONVERTIBLE CPE. ..................................................... $595 "W Holiday roupe Radio It hcaUr. hydra- maUr. power steering, pnw»r orak^a. powrr 1954 BUICK RIVIERA SUPER ..............^^^ window*, fi-way pw of 1953 BUICK SUPER RIVIERA HARD-TOP ............................... $1 195 $2395 1955 CHEVROLET '/2 JON TRUCK ............................................ $1 195 IF YOU HAVE GOOD SPECIALS CREDIT and $10.00 Come in and we can make you a good NAME YOUR OWN DEAL! deal with low monthly payments. i i '54 OLDS ft u per RH Holiday OSCAR MAPLES USED CAR INDEX" roupe. Radio A heater, hy dramatic, power leering, power '50 PLYMOUTH ................ -

TORRANCE HERALD Thirtyflvcj Trucks, He
AtTOMOBILKS 112 AUTOMOBILES 112 AfTOMOBH.KS 112 AUTOMOBILES 112 MAR. 13, 1958 TORRANCE HERALD Thirtyflvcj Trucks, He. I Trucks, dr. Trucks. c(c. Trucks, etc. AUTOMOBILES 113 AUTOMOBILES 112 AUTOMOBILES m MT(.MolUI.ES 112 AUTOMOBILES ~ 112 1 Trucks, etc. Trucks, etc. Trucks, etc. Trucks, clc. Trucks, etc. Ronald E. Moran's IMPORTED 2 CARS <> GIANT MID-WINTER CAR For The Price Of One! S-A-L-E NEWS If You Need 2 Cars. .. Consider This Actual Case! OF QUALITY USED CARS DIGEST (This letter printed with permission of the writer.) Mr. George Whittlesey, Pros., from SMALL CARS MAGAZINE Whittlesey Motors, Inc., Now Going On! Rootes Motor Ltd. of England added the word 1212 So. Pacific Coast Hwy., "Jubilee" to the designation of the 1958 Hillman Redondo Beach, Calif. Minx to mark the beginning of their second fifty years in the car business. The Jubilee models'are Dear George, available in four-door sedans, a convertible and a four-door station wagon, all of which use unitized Two months ago I was faced with the problem of getting a second cir '56 Cadillac '62' Convertible construction. for my wife's use. I had a '55 medium price range Station Wagon but I now wanted a sedan for my wife. So I shopped! I wanted to trade in my '55 wecjon Sold new and »ervicec) by us. A real homy I Light green finish with original white The new models feature a boost in torque that ' orlon top. CARRIES 1-YEAR WARRANTY! for a new sedan of the sdme make. I also wanted to buy a good used car for steps up performance in the lower speed ranges myself. -

Basis of Design
UNIVERSITY OF WASHINGTON Mechanical Facilities Services Heating Ventilation and Air Conditioning Design Guide Ductwork and Duct Accessories Basis of Design This section applies to the design and installation of ductwork, air terminal boxes, air outlets and inlets, volume dampers, pressure relief dampers, smoke/fire dampers, and smoke/fire damper actuators. Design Criteria Select duct velocities to meet N.C. requirements of each occupied space. NC level requirements shall be identified in the Basis of Design narrative. Coordinate required NC levels with University Project Manager and users. Supply, Return and Non Fume Exhaust Ductwork Provide a 6-inch pressure rating for supply ductwork and plenums between the supply fan and the zone terminal boxes; for ductwork downstream of the terminal box, provide a 2-inch pressure rating. If pressure classes less than those given above are considered sufficient for a specific application, review with Engineering Services before specifying a lower rating. Use the ASHRAE Handbook of Fundamentals chapter on duct design to determine the allowable leakage rate (cfm/100 sq.ft.) at the specified test pressure for each type of ductwork on the project other than fume exhaust ductwork. Specify for each type of ductwork the duct pressure rating, the pressure to apply during the duct leakage test, and the allowable cfm/100 sq.ft. leakage rate at the test pressure. Minimize use of square elbows. Provide turning vanes in square elbows of supply ductwork. Do not use turning vanes in return or exhaust ductwork. To minimize noise levels in the space, specify balancing dampers in lieu of registers. Provide a balancing damper for each outlet and each inlet. -

Ger-4610 (3/2012)
GE Energy Exhaust System Upgrade Options for Heavy Duty Gas Turbines GER-4610 (3/2012) Timothy Ginter Energy Services Note: All values in this GER are approximate and subject to contractual terms. ©201 2, General Electric Company. All rights reserved. Contents: Abstract . 1 Configuration Overview . 2 Site Inspections . 5 Available Exhaust Upgrades . 8 Frames, Aft Diffusers, Cooling, and Blowers . 12 FS1U – Exhaust Frame Assembly Upgrades (51A-R, 52A-C, 61A/B) . 13 FS1W – Exhaust Frame Assembly and Cooling Upgrades (71A-EA, 91B/E) . 14 FS2D – Exhaust Frame Blower Upgrade (71E/EA, 91E) . 21 FW3N – Exhaust Diffuser Upgrades (6FA, 7F-FA+, 9F/FA) . 22 Plenums and Flex Seals . 22 FD4H – Exhaust Plenum Upgrades (32A-K, 51A-R, 52A-C, 61A/B, 71A-EA, 91B/E, 6FA, 7F-FA+, 9F/FA) . 23 FD4H – Exhaust Flex Seal Upgrades (61A/B, 71A-EA, 91B/E) . 29 FD4H – Engineering Site Visits . 29 Ductwork, Stacks, and Silencers . 30 FD6G-K and FD4H – Exhaust Duct, Stack, and Silencer Upgrades (32A-K, 51A-R, 52A-C, 61A/B, 71A-EA, 91B/E, 6FA, 7F-FA+, 9F/FA) . 30 Summary . 32 References . 33 List of Figures . 34 GE Energy | GER-4610 (3/2012) i ii Exhaust System Upgrade Options for Heavy Duty Gas Turbines Abstract This document discusses the Corrosion and Heat Resistant Original Equipment Manufacturer (CHROEM*) improved exhaust Since their introduction in 1978, advances in materials, cooling, systems offered by GE. (See Figure 1.) The CHROEM exhaust and design have allowed GE gas turbines to operate with system applies the latest GE technology to extend life and increased firing temperatures and airflows. -

BIG SALE! Wililb; Rffjl Heater a Beauty No
SALE AUTOMOBILES FOR SALE the evening star AUTOS FOR SALE (Cant.) AUTOMOBILIS FOR SALE AUTOMOBILES FOR SALE | | AUTOMOBILES FOR SALE AUTOMOiIIES FOR SALE AUTOMOBILES FOB SALE AUTOMOBILES FOR I| f C-15 and, Washington, D. C. Plaza V-8 4-dr : PONTIAC Cugtom sedan; r. 1 hardtop coupe; $2,854; 4-dr.; VOLKSWAGEN 19.56: radio IM7 OLDSMOBILE \V» Super ‘ SS" 2-dr.: j hardtop PLYMOUTH 55 1947 PONTIAC ’57 STUDEBAKER 48 Commander r heater. $1,550. FRIDAY. FEHRLARY 18. power steering PLYMOUTH “1954 Belvedere 1 excellent conci. throughout; $995 I j and h . almcst-new tires: looks de luxe hydra., power steer ; used has heater, etc.: runs good; $95. TIII’NDERRIRD 'Sfl: Fordomutlc. Call HO. 2-2627. r and h.. w.-w. tires, club coupe; radio, heater, white- price. and h., power steering and brakes * brakes; like new throughout; Whitehall 6-2038. and runs like new; $135 full 1.000 miles; new-car warranty. BOWMAN MOTOR SALES. INC., WILLYS 'SO 4-wheel dr. 1-ton* re-i and wall tires: excellent, like new. must See and 0 pin. PONTIAC. Connecti- 7606 Georgia lops, w.-w, tires; beautiful snow-; placed motor, arrange PONTIAC *53 ChieftaiiPde between I 1730 FLOOD 4221 n W. RA. 6-1122. 2 new; clean’ *595. HUNTER $1 800. sacrifice. $1,045: can terms. luxe 8:1 ! R I ave. n e shoe white finish, like $3.095.> LA r. and h„ auto, trans.. beautiful! cut. STUDEBAKER 50 Commander 2-dr. Wash ’s MOTORS,.. KI. 8-1333.__ “O" S2OO dn. Mr. Arthur. 6-5820. M sedan; • h., HILL Si BANDERB.