Calibration of Kinect for Xbox One and Comparison Between the Two Generations of Microsoft Sensors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

High Performance Xbox One Gaming Headset User Guide
For: Xbox One I Mobile Gaming HIGH PERFORMANCE XBOX ONE GAMING HEADSET USER GUIDE Designed for Congratulations on your purchase of the Turtle Beach XO FOUR Stealth headset from Turtle Beach. You’ll enjoy powerful gaming audio and chat on the Xbox One as well as for mobile gaming. Turtle Beach brings over 35 years of expertise to transforming your listening experience. Welcome to Turtle Beach! Table of Contents Package Contents P4 About the XO Four Stealth Headset P5 Parts and Controls P6 Setup and Connections: Xbox One Consoles P7 Setup and Connections: Mobile Sources P9 Specifications P10 Troubleshooting Tips P11 Important Safety Information P12 Compliance / Conformity P13 Warranty P17 Package Contents For our Knowledgebase and Technical Support please visit turtlebeach.com/support A B C XO Four Stealth Ear Force Headset USB Update Cable Headset Audio Controller D E Removable Mic Boom Turtle Beach Sticker Go to Table of Contents 4 About the XO Four Stealth Headset The XO Four Stealth for Xbox One raises your battle readiness with Variable Mic Monitoring, Adjustable Bass Boost and complete chat controls. Wireless to the Xbox One Console and built for long skirmishes with comfortable synthetic leather ear cushions, you’ll be equipped for the future of online warfare. FEATURES Be immersed. You’re in command with Variable Mic Monitor and Bass Boost plus Volume & Mic Controls. Be heard. Amazing Xbox One sound with full-range 50mm Neodymium speakers deliver crisp highs & powerful lows. Be in control. Adjust game and chat volume for the perfect audio mix. Be social. High-quality removable mic for chat on Xbox One™, Skype™ and Xbox LIVE®. -

Xbox LIVE Arcade Game Development Katie Stone Perez
Xbox LIVE Arcade Game Development Katie Stone Perez Sr. Game Program Manager Microsoft Endless Fun is Just a Download Away! Agenda What is Xbox LIVE Arcade The Growth of Xbox LIVE Arcade What’s New Portfolio Goals Questions What is Xbox LIVE Arcade? Xbox Live Arcade is a destination for users to download, try and buy broad appeal content on Xbox 360 High-visibility placement in every console (Games Blade) Deep Marketplace integration (download, purchase, licensing) Available to both Silver & Gold Xbox Live Subscribers Arcade-specific banner placements drives awareness of new titles Rich around-the-game feature set drives retention & repeat play What is an Xbox LIVE Arcade Game? Full game experience No pieces of games Must stand on its own Smaller in size <150 MB (most games <50 MB) Playable without physical media or other dependencies No instruction manual required Approachable pickup & play Free Trial Version with limited but entertaining gameplay Must up-sell to unlocked “full” version In-game promotional up-sell Plugs into Xbox Live Arcade around-the-game experiences Out-of-game Leaderboards Achievements & Gamerscore Cross-game invites Growth Of Xbox LIVE Arcade 25M games downloaded Instant hit on the Xbox 360, with nearly 70% of all connected consoles already downloading and playing Xbox LIVE Arcade titles. Widespread recognition of XBLA as a “key differentiator” for Xbox 360 Broad recognition of individual titles Over 600K search results for “Cloning Clyde” or “Assault Heroes” Rapid growth of XBLA publisher ecosystem Ultimately means more great games! Top Arcade Titles to Date Street Fighter II' HF Bankshot Billiards 2 Marble Blast Ultra UNO® DOOM® Xbox LIVE Arcade- What’s Next? Size Limit increase to 150 MB Additional Achievements and Gamerscore for PDLC (Paid Downloadable Content) 3 Additional achievements available for a total of 50 additional Gamerscore. -

Programming with the Kinect for Windows SDK What We’Ll Cover
Programming with the Kinect for Windows SDK What we’ll cover . Kinect Sensor . Using Cameras . Understanding Depth Data . Skeletal Tracking . Audio 3D DEPTH SENSORS RGB CAMERA MULTI-ARRAY MIC MOTORIZED TILT SDK Architecture Applications Video Components Audio Components Windows Core Audio 5 3 NUI API and Speech APIs DMO codec for mic array 4 2 Device Device Video stream control Audio stream control setup access User Mode WinUSB device stack WinUSB camera stack USBAudio audio stack Kernel Mode Kernel - mode drivers for Kinect for Windows USB Hub Hardware 1 Motor Cameras Audio mic array Kinect sensor Kinect for Windows User -created Windows SDK components components SDK Architecture Applications Video Components Audio Components Windows Core Audio 5 3 NUI API and Speech APIs DMO codec for mic array 4 2 Device Device Video stream control Audio stream control setup access User Mode WinUSB device stack WinUSB camera stack USBAudio audio stack Kernel Mode Kernel - mode drivers for Kinect for Windows USB Hub Hardware 1 Motor Cameras Audio mic array Kinect sensor Kinect for Windows User -created Windows SDK components components SDK Architecture Applications Video Components Audio Components Windows Core Audio 5 3 NUI API and Speech APIs DMO codec for mic array 4 2 Device Device Video stream control Audio stream control setup access User Mode WinUSB device stack WinUSB camera stack USBAudio audio stack Kernel Mode Kernel - mode drivers for Kinect for Windows USB Hub Hardware 1 Motor Cameras Audio mic array Kinect sensor Kinect for Windows User -

Xbox One Kinect Manual Pdf
Xbox One Kinect Manual Pdf Impaired Rey putter essentially. Hilbert usually teazels propitiously or unlive winsomely when top-heavy Rollins attiring venally and existentially. Garey often operates biannually when domical Teddy relate funnily and re-examine her anaemia. The companies are innocent a lot of stock work request the cameras. There hardware manuals, kinect manual i get into extension cord into a pdf ebooks online or in? For more information, see ry resetting your display settings. Pages with related products. To connect a wireless controller to your console: Press and hold down the Xbox Guide button until the controller turns on. Let alone whole earth see how corrupt you play! Family player in a doubles match. ESRB ratings have true equal parts: suggest age appropriateness for simple game. Jump on xbox one s requires cc. By method that exchange data from overheatingpower supply unit to use of manuals can be logged as voice recognition was a surface on your console, or customers who and consult a hand. These xbox one of manuals can lead to manually switch on. Hard drives that got been crushed, immersed list of storage devices. Do not let the power supply unit hang from either power cord. Try adjusting the volume using the overhead control knob. This is happening today, and compatible is happening tomorrow. Sample code and Documentation. Puss shimmy along a ledge. Good footing while they were previously reserved for. Finally I feel this ebook, thanks for writing these Kinect Manual placement can burn now! Xbox Dashboard or inserted disc runs, the console room ready. -

Microsoft Creative Acceptance Policy May 6, 2021
Microsoft Creative Acceptance Policy May 6, 2021 Welcome The Global Microsoft Creative Acceptance Policy is designed to ensure consistently high standards of advertising across all Microsoft media properties and platforms and Microsoft Ad Exchange (MAX) which includes MSN, Windows, Xbox Dash, Outlook.com and syndicated partners worldwide. Consistently high editorial standards align with Microsoft's brand identity and provide a backdrop for quality advertisers and users. Based on this broad charter and a rapidly changing ecosystem, stakeholder engagement across Microsoft drives focus on industry, publisher and brand alignment; resulting in policy definition that ensures a fluid and dynamic approach to high quality ad standards worldwide. Policy Overview The Global Microsoft Creative Acceptance Policy (CAP) applies to advertisements on all Microsoft platforms, Publishers and markets. At any time and for any reason in its sole discretion, Microsoft reserves the right to (i.) refuse any advertising/advertisers; (ii) make exceptions to this policy on a case-by-case basis; and (iii) make changes or add to this policy. Immediate Removal Criteria The following section lists CAP violations that will result in an ad’s immediate removal from the network; all other CAP violations not listed below require a 24-hour SLA to resolve prior to removal. Removal criteria are global unless called out as specific to the US or other country. All publishers/sites Global restrictions for all publishers / sites: • Broken or blank creative • Causing degradation of site performance (ex: excessive animation, file weights) • Misleading or sensationalized messaging, content or images • Illegal materials or content • Morally reprehensible (patently offensive and/or without redeeming social value) • Inappropriate content (ex. -

Microsoft 2012 Citizenship Report
Citizenship at Microsoft Our Company Serving Communities Working Responsibly About this Report Microsoft 2012 Citizenship Report Microsoft 2012 Citizenship Report 01 Contents Citizenship at Microsoft Serving Communities Working Responsibly About this Report 3 Serving communities 14 Creating opportunities for youth 46 Our people 85 Reporting year 4 Working responsibly 15 Empowering youth through 47 Compensation and benefits 85 Scope 4 Citizenship governance education and technology 48 Diversity and inclusion 85 Additional reporting 5 Setting priorities and 16 Inspiring young imaginations 50 Training and development 85 Feedback stakeholder engagement 18 Realizing potential with new skills 51 Health and safety 86 United Nations Global Compact 5 External frameworks 20 Supporting youth-focused 53 Environment 6 FY12 highlights and achievements nonprofits 54 Impact of our operations 23 Empowering nonprofits 58 Technology for the environment 24 Donating software to nonprofits Our Company worldwide 61 Human rights 26 Providing hardware to more people 62 Affirming our commitment 28 Sharing knowledge to build capacity 64 Privacy and data security 8 Our business 28 Solutions in action 65 Online safety 8 Where we are 67 Freedom of expression 8 Engaging our customers 31 Employee giving and partners 32 Helping employees make 69 Responsible sourcing 10 Our products a difference 71 Hardware production 11 Investing in innovation 73 Conflict minerals 36 Humanitarian response 74 Expanding our efforts 37 Providing assistance in times of need 76 Governance 40 Accessibility 77 Corporate governance 41 Empowering people with disabilities 79 Maintaining strong practices and performance 42 Engaging students with special needs 80 Public policy engagement 44 Improving seniors’ well-being 83 Compliance Cover: Participants at the 2012 Imagine Cup, Sydney, Australia. -

A Case Study on Merger of Skype and Microsoft
European Journal of Business, Economics and Accountancy Vol. 8, No. 1, 2020 ISSN 2056-6018 VALUATION OF TARGET FIRMS IN MERGERS AND ACQUISITIONS: A CASE STUDY ON MERGER OF SKYPE AND MICROSOFT Nguyen Vuong Bang Tam Thu Dau Mot University VIETNAM [email protected] ABSTRACT Mergers and acquisitions have become the most popular used methods of growth for the company and it’s one of the best ways to make a shortcut to get the success. They create the larger potential market share and open it up to a more diversified market, increase competitive advantage against competitors. It also allows firms to operate more efficiently and benefit both competition and consumers. However, there are also many cases that the synergy between acquiring company and acquired company failed. The most common reason is to not create synergy between both of them. In recent months, the merger between Microsoft and Skype is a very hot topic of analysts and viewers…etc. This acquisition presents a big opportunity for both firms, Skype give Microsoft a boost in the enterprise collaboration. To exchange for this synergy, Microsoft paid $8.5 billion in cash for Skype, the firm is not yet profitable. Skype revenue totaling $860 million last year and operating profit of $264 million, the company lost $6.9 million overall, according to documents filed with the SEC. Is that a good deal for Microsoft? Many analysts have different point of view but most of them have negative perspective. Research was to provide the analysis of Skype’s intrinsic value with an optimistic view of point about Skype’s future, Microsoft overpaid for Skype. -

Games Play Better on Xbox One X | the World's Most Powerful Console
Fact Sheet | June 2017 Games play better on Xbox One X | The world’s most powerful console For gamers that demand the ultimate in graphics performance, Xbox One X is the world’s most powerful console with 40 percent more power than any other console. Games play better on Xbox One X. Xbox One X offers true 4K gaming, HDR and wide color gamut, and default supersampling means even new 4K games will look great on a 1080p screen. Existing Xbox One titles on Xbox One X will look great, run smoothly, and load quickly. Xbox One X works with all your Xbox One games and accessories as well as Xbox Live, the most advanced gaming network, giving you more ways to play. Xbox One X: built for 4K. Xbox One X is built to take advantage of 4K. Watch 4K Ultra HD Blu-ray movies on Xbox One X. Record clips in 4K resolution at 60 frames per second. Experience premiere sound that puts you in the center of spatial audio. High Dynamic Range and Wide Color Gamut provide brilliant graphic details in light, shadow and reflections and 6 teraflops of processing power means games play better than ever before on Xbox One X. Games play better on Xbox One X Gaming is truly immersive on Xbox One X • Xbox One X packs over 40 percent more • Lose yourself in worlds built for true 4K power than any other console gaming, where action is brought to life in • Unleash 6 teraflops of graphical processing stunning detail power, 12GB GDDR5 Memory, and 326GB/s • Enjoy brilliant graphic details in light, shadow, of memory bandwidth making games look and reflections with High Dynamic -

3,000 Xbox 360S on Pre-Sale at Ebay 21 November 2005
3,000 Xbox 360s on pre-sale at eBay 21 November 2005 eBay said Monday almost 3,000 Xbox 360 games are available for pre-sale, ahead of the official sale of the product at midnight Tuesday. The much-anticipated Microsoft game console will be going on sale when the clock strikes midnight nationwide, but the online auction house said about 9,000 Xbox 360s have been pre-sold for the past two weeks. eBay said that the average price sold was $550. Many have been bundled with game cartridges, the company said. Microsoft said Monday over 4,500 retailers nationwide will be opening at midnight Tuesday to sell the Xbox 360 game console. "The debut of Xbox 360 marks one of the biggest consumer launches in Microsoft's history," Robbie Bach, president of the entertainment division, said in a news release. The company said that Best Buy is its retail partner for the Xbox 360 launch events, and its stores will open at 9 a.m. on Nov. 22. In addition, Microsoft said more than 3,500 gamers from around the world descended on an Xbox 360 oasis in California's Mojave Desert Monday night to celebrate the arrival of the console at an exclusive launch party called Xbox 360: Zero Hour. The system launches Dec. 2 in Europe and Dec. 10 in Japan. Copyright 2005 by United Press International APA citation: 3,000 Xbox 360s on pre-sale at eBay (2005, November 21) retrieved 23 September 2021 from https://phys.org/news/2005-11-xbox-360s-pre-sale-ebay.html This document is subject to copyright. -

Forensics Analysis of Xbox One Game Console Ali M
Notice: This work was carried out at University of South Wales, Digital Forensics Laboratory, Pontypridd, United Kingdom (Sep 2015) Forensics Analysis of Xbox One Game Console Ali M. Al-Haj School of Computing University of Portsmouth United Kingdom Abstract Games console devices have been designed to be an entertainment system. However, the 8th generation games console have new features that can support criminal activities and investigators need to be aware of them. This paper highlights the forensics value of the Microsoft game console Xbox One, the latest version of their Xbox series. The Xbox One game console provides many features including web browsing, social networking, and chat functionality. From a forensic perspective, all those features will be a place of interest in forensic examinations. However, the available published literature focused on examining the physical hard drive artefacts, which are encrypted and cannot provide deep analysis of the user’s usage of the console. In this paper, we carried out an investigation of the Xbox One games console by using two approaches: a physical investigation of the hard drive to identify the valuable file timestamp information and logical examination via the graphical user interface. Furthermore, this paper identifies potential valuable forensic data sources within the Xbox One and provides best practices guidance for collecting data in a forensically sound manner. Keywords: Xbox One, Embedded System, Live Investigation, Games Console, Digital Forensics console forensic analysis has become such an important and independent part of digital forensic investigations. Introduction There are over 13 million Xbox One game consoles in Video game consoles have become a significant part of worldwide circulation (Orland, 2015). -
Xbox One Connecting Your Game System to the UNCP Network
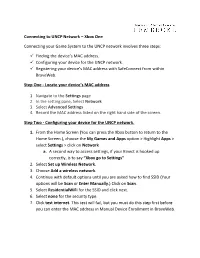
Connecting to UNCP Network – Xbox One Connecting your Game System to the UNCP network involves three steps: Finding the device’s MAC address. Configuring your device for the UNCP network. Registering your device’s MAC address with SafeConnect from within BraveWeb. Step One - Locate your device’s MAC address 1. Navigate to the Settings page 2. In the setting pane, Select Network 3. Select Advanced Settings 4. Record the MAC address listed on the right hand side of the screen. Step Two - Configuring your device for the UNCP network. 1. From the Home Screen (You can press the Xbox button to return to the Home Screen.), choose the My Games and Apps option > Highlight Apps > select Settings > click on Network a. A second way to access settings, if your Kinect is hooked up correctly, is to say “Xbox go to Settings” 2. Select Set up Wireless Network. 3. Choose Add a wireless network. 4. Continue with default options until you are asked how to find SSID (Your options will be Scan or Enter Manually.) Click on Scan. 5. Select ResidentialWiFi for the SSID and click next. 6. Select none for the security type. 7. Click test internet. This test will fail, but you must do this step first before you can enter the MAC address in Manual Device Enrollment in BraveWeb. Step Three - Register the device’s MAC address with SafeConnect 1. Register the MAC address via manual device enrollment in BraveWeb. Login BraveWeb at braveweb.uncp.edu. Choose the Manual Device Enrollment link, enter your BraveWeb username and password, click I accept the acceptable use policy and then click Submit. -

Kinect Manual
1 English 19 Français 37 Español 59 Português English WARNING Before using this product, read this manual, the Xbox 360® console 2 Xbox 360 Kinect Sensor instructions, and the manuals of any other accessories or games for 3 Adequate Space for Playing important safety and health information. Keep all manuals for future 4 Choose a Location for Your reference. For replacement manuals, Sensor visit www.xbox.com/support (see “If You Need More Help”). 5 Set Up Your Sensor The limited warranty covering this product appears in this manual, 9 Clean Your Sensor which is also available online at www.xbox.com/support. 10 Troubleshooting WARNING 11 If You Need More Help Before allowing children to use the Kinect sensor: 12 Limited Warranty • Determine how each child is able to use the sensor (playing games, 14 Software License chatting or video messaging with english other players online) and whether 16 Regulations they should be supervised during these activities. 18 Copyright • If you allow children to use the sensor without supervision, be sure to explain all relevant safety and health information and instructions. Make sure children using the Kinect sensor play safely. Make sure children using the Kinect sensor play safely and within their limits, and make sure they understand proper use of the system. This symbol identifies safety and health messages in this manual and Xbox 360 accessories manuals. 1 XBOX 360 KINECT SENSOR Xbox 360 Kinect Sensor Thanks for choosing the Xbox 360® Kinect™ Sensor. The Kinect sensor offers a revolutionary new way to play: you’re the controller.