Three-Dimensional Kinematic Analysis Using the Xbox Kinect
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Xbox LIVE Arcade Game Development Katie Stone Perez
Xbox LIVE Arcade Game Development Katie Stone Perez Sr. Game Program Manager Microsoft Endless Fun is Just a Download Away! Agenda What is Xbox LIVE Arcade The Growth of Xbox LIVE Arcade What’s New Portfolio Goals Questions What is Xbox LIVE Arcade? Xbox Live Arcade is a destination for users to download, try and buy broad appeal content on Xbox 360 High-visibility placement in every console (Games Blade) Deep Marketplace integration (download, purchase, licensing) Available to both Silver & Gold Xbox Live Subscribers Arcade-specific banner placements drives awareness of new titles Rich around-the-game feature set drives retention & repeat play What is an Xbox LIVE Arcade Game? Full game experience No pieces of games Must stand on its own Smaller in size <150 MB (most games <50 MB) Playable without physical media or other dependencies No instruction manual required Approachable pickup & play Free Trial Version with limited but entertaining gameplay Must up-sell to unlocked “full” version In-game promotional up-sell Plugs into Xbox Live Arcade around-the-game experiences Out-of-game Leaderboards Achievements & Gamerscore Cross-game invites Growth Of Xbox LIVE Arcade 25M games downloaded Instant hit on the Xbox 360, with nearly 70% of all connected consoles already downloading and playing Xbox LIVE Arcade titles. Widespread recognition of XBLA as a “key differentiator” for Xbox 360 Broad recognition of individual titles Over 600K search results for “Cloning Clyde” or “Assault Heroes” Rapid growth of XBLA publisher ecosystem Ultimately means more great games! Top Arcade Titles to Date Street Fighter II' HF Bankshot Billiards 2 Marble Blast Ultra UNO® DOOM® Xbox LIVE Arcade- What’s Next? Size Limit increase to 150 MB Additional Achievements and Gamerscore for PDLC (Paid Downloadable Content) 3 Additional achievements available for a total of 50 additional Gamerscore. -

Microsoft Creative Acceptance Policy May 6, 2021
Microsoft Creative Acceptance Policy May 6, 2021 Welcome The Global Microsoft Creative Acceptance Policy is designed to ensure consistently high standards of advertising across all Microsoft media properties and platforms and Microsoft Ad Exchange (MAX) which includes MSN, Windows, Xbox Dash, Outlook.com and syndicated partners worldwide. Consistently high editorial standards align with Microsoft's brand identity and provide a backdrop for quality advertisers and users. Based on this broad charter and a rapidly changing ecosystem, stakeholder engagement across Microsoft drives focus on industry, publisher and brand alignment; resulting in policy definition that ensures a fluid and dynamic approach to high quality ad standards worldwide. Policy Overview The Global Microsoft Creative Acceptance Policy (CAP) applies to advertisements on all Microsoft platforms, Publishers and markets. At any time and for any reason in its sole discretion, Microsoft reserves the right to (i.) refuse any advertising/advertisers; (ii) make exceptions to this policy on a case-by-case basis; and (iii) make changes or add to this policy. Immediate Removal Criteria The following section lists CAP violations that will result in an ad’s immediate removal from the network; all other CAP violations not listed below require a 24-hour SLA to resolve prior to removal. Removal criteria are global unless called out as specific to the US or other country. All publishers/sites Global restrictions for all publishers / sites: • Broken or blank creative • Causing degradation of site performance (ex: excessive animation, file weights) • Misleading or sensationalized messaging, content or images • Illegal materials or content • Morally reprehensible (patently offensive and/or without redeeming social value) • Inappropriate content (ex. -

A Case Study on Merger of Skype and Microsoft
European Journal of Business, Economics and Accountancy Vol. 8, No. 1, 2020 ISSN 2056-6018 VALUATION OF TARGET FIRMS IN MERGERS AND ACQUISITIONS: A CASE STUDY ON MERGER OF SKYPE AND MICROSOFT Nguyen Vuong Bang Tam Thu Dau Mot University VIETNAM [email protected] ABSTRACT Mergers and acquisitions have become the most popular used methods of growth for the company and it’s one of the best ways to make a shortcut to get the success. They create the larger potential market share and open it up to a more diversified market, increase competitive advantage against competitors. It also allows firms to operate more efficiently and benefit both competition and consumers. However, there are also many cases that the synergy between acquiring company and acquired company failed. The most common reason is to not create synergy between both of them. In recent months, the merger between Microsoft and Skype is a very hot topic of analysts and viewers…etc. This acquisition presents a big opportunity for both firms, Skype give Microsoft a boost in the enterprise collaboration. To exchange for this synergy, Microsoft paid $8.5 billion in cash for Skype, the firm is not yet profitable. Skype revenue totaling $860 million last year and operating profit of $264 million, the company lost $6.9 million overall, according to documents filed with the SEC. Is that a good deal for Microsoft? Many analysts have different point of view but most of them have negative perspective. Research was to provide the analysis of Skype’s intrinsic value with an optimistic view of point about Skype’s future, Microsoft overpaid for Skype. -

Games Play Better on Xbox One X | the World's Most Powerful Console
Fact Sheet | June 2017 Games play better on Xbox One X | The world’s most powerful console For gamers that demand the ultimate in graphics performance, Xbox One X is the world’s most powerful console with 40 percent more power than any other console. Games play better on Xbox One X. Xbox One X offers true 4K gaming, HDR and wide color gamut, and default supersampling means even new 4K games will look great on a 1080p screen. Existing Xbox One titles on Xbox One X will look great, run smoothly, and load quickly. Xbox One X works with all your Xbox One games and accessories as well as Xbox Live, the most advanced gaming network, giving you more ways to play. Xbox One X: built for 4K. Xbox One X is built to take advantage of 4K. Watch 4K Ultra HD Blu-ray movies on Xbox One X. Record clips in 4K resolution at 60 frames per second. Experience premiere sound that puts you in the center of spatial audio. High Dynamic Range and Wide Color Gamut provide brilliant graphic details in light, shadow and reflections and 6 teraflops of processing power means games play better than ever before on Xbox One X. Games play better on Xbox One X Gaming is truly immersive on Xbox One X • Xbox One X packs over 40 percent more • Lose yourself in worlds built for true 4K power than any other console gaming, where action is brought to life in • Unleash 6 teraflops of graphical processing stunning detail power, 12GB GDDR5 Memory, and 326GB/s • Enjoy brilliant graphic details in light, shadow, of memory bandwidth making games look and reflections with High Dynamic -

3,000 Xbox 360S on Pre-Sale at Ebay 21 November 2005
3,000 Xbox 360s on pre-sale at eBay 21 November 2005 eBay said Monday almost 3,000 Xbox 360 games are available for pre-sale, ahead of the official sale of the product at midnight Tuesday. The much-anticipated Microsoft game console will be going on sale when the clock strikes midnight nationwide, but the online auction house said about 9,000 Xbox 360s have been pre-sold for the past two weeks. eBay said that the average price sold was $550. Many have been bundled with game cartridges, the company said. Microsoft said Monday over 4,500 retailers nationwide will be opening at midnight Tuesday to sell the Xbox 360 game console. "The debut of Xbox 360 marks one of the biggest consumer launches in Microsoft's history," Robbie Bach, president of the entertainment division, said in a news release. The company said that Best Buy is its retail partner for the Xbox 360 launch events, and its stores will open at 9 a.m. on Nov. 22. In addition, Microsoft said more than 3,500 gamers from around the world descended on an Xbox 360 oasis in California's Mojave Desert Monday night to celebrate the arrival of the console at an exclusive launch party called Xbox 360: Zero Hour. The system launches Dec. 2 in Europe and Dec. 10 in Japan. Copyright 2005 by United Press International APA citation: 3,000 Xbox 360s on pre-sale at eBay (2005, November 21) retrieved 23 September 2021 from https://phys.org/news/2005-11-xbox-360s-pre-sale-ebay.html This document is subject to copyright. -

Forensics Analysis of Xbox One Game Console Ali M
Notice: This work was carried out at University of South Wales, Digital Forensics Laboratory, Pontypridd, United Kingdom (Sep 2015) Forensics Analysis of Xbox One Game Console Ali M. Al-Haj School of Computing University of Portsmouth United Kingdom Abstract Games console devices have been designed to be an entertainment system. However, the 8th generation games console have new features that can support criminal activities and investigators need to be aware of them. This paper highlights the forensics value of the Microsoft game console Xbox One, the latest version of their Xbox series. The Xbox One game console provides many features including web browsing, social networking, and chat functionality. From a forensic perspective, all those features will be a place of interest in forensic examinations. However, the available published literature focused on examining the physical hard drive artefacts, which are encrypted and cannot provide deep analysis of the user’s usage of the console. In this paper, we carried out an investigation of the Xbox One games console by using two approaches: a physical investigation of the hard drive to identify the valuable file timestamp information and logical examination via the graphical user interface. Furthermore, this paper identifies potential valuable forensic data sources within the Xbox One and provides best practices guidance for collecting data in a forensically sound manner. Keywords: Xbox One, Embedded System, Live Investigation, Games Console, Digital Forensics console forensic analysis has become such an important and independent part of digital forensic investigations. Introduction There are over 13 million Xbox One game consoles in Video game consoles have become a significant part of worldwide circulation (Orland, 2015). -
Xbox One Connecting Your Game System to the UNCP Network
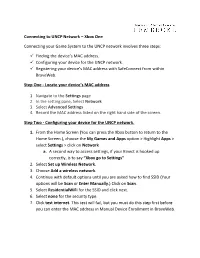
Connecting to UNCP Network – Xbox One Connecting your Game System to the UNCP network involves three steps: Finding the device’s MAC address. Configuring your device for the UNCP network. Registering your device’s MAC address with SafeConnect from within BraveWeb. Step One - Locate your device’s MAC address 1. Navigate to the Settings page 2. In the setting pane, Select Network 3. Select Advanced Settings 4. Record the MAC address listed on the right hand side of the screen. Step Two - Configuring your device for the UNCP network. 1. From the Home Screen (You can press the Xbox button to return to the Home Screen.), choose the My Games and Apps option > Highlight Apps > select Settings > click on Network a. A second way to access settings, if your Kinect is hooked up correctly, is to say “Xbox go to Settings” 2. Select Set up Wireless Network. 3. Choose Add a wireless network. 4. Continue with default options until you are asked how to find SSID (Your options will be Scan or Enter Manually.) Click on Scan. 5. Select ResidentialWiFi for the SSID and click next. 6. Select none for the security type. 7. Click test internet. This test will fail, but you must do this step first before you can enter the MAC address in Manual Device Enrollment in BraveWeb. Step Three - Register the device’s MAC address with SafeConnect 1. Register the MAC address via manual device enrollment in BraveWeb. Login BraveWeb at braveweb.uncp.edu. Choose the Manual Device Enrollment link, enter your BraveWeb username and password, click I accept the acceptable use policy and then click Submit. -

Kinect Manual
1 English 19 Français 37 Español 59 Português English WARNING Before using this product, read this manual, the Xbox 360® console 2 Xbox 360 Kinect Sensor instructions, and the manuals of any other accessories or games for 3 Adequate Space for Playing important safety and health information. Keep all manuals for future 4 Choose a Location for Your reference. For replacement manuals, Sensor visit www.xbox.com/support (see “If You Need More Help”). 5 Set Up Your Sensor The limited warranty covering this product appears in this manual, 9 Clean Your Sensor which is also available online at www.xbox.com/support. 10 Troubleshooting WARNING 11 If You Need More Help Before allowing children to use the Kinect sensor: 12 Limited Warranty • Determine how each child is able to use the sensor (playing games, 14 Software License chatting or video messaging with english other players online) and whether 16 Regulations they should be supervised during these activities. 18 Copyright • If you allow children to use the sensor without supervision, be sure to explain all relevant safety and health information and instructions. Make sure children using the Kinect sensor play safely. Make sure children using the Kinect sensor play safely and within their limits, and make sure they understand proper use of the system. This symbol identifies safety and health messages in this manual and Xbox 360 accessories manuals. 1 XBOX 360 KINECT SENSOR Xbox 360 Kinect Sensor Thanks for choosing the Xbox 360® Kinect™ Sensor. The Kinect sensor offers a revolutionary new way to play: you’re the controller. -

Kinect for Xbox 360
MEDIA ALERT “Kinect” for Xbox 360 sets the future in motion — no controller required Microsoft reveals new ways to play that are fun and easy for everyone Sydney, Australia – June 15th – Get ready to Kinect to fun entertainment for everyone. Microsoft Corp. today capped off a two-day world premiere in Los Angeles, complete with celebrities, stunning physical dexterity and news from a galaxy far, far away, to reveal experiences that will transform living rooms in North America, beginning November 4th and will roll out to Australia and the rest of the world thereafter. Opening with a magical Cirque du Soleil performance on Sunday night attended by Hollywood’s freshest faces, Microsoft gave the transformation of home entertainment a name: Kinect for Xbox 360. Then, kicking off the Electronic Entertainment Expo (E3), Xbox 360 today invited the world to dance, hurdle, soar and make furry friends for life — all through the magic of Kinect — no controller required. “With ‘Kinectimals*’ and ‘Kinect Sports*’, ‘Your Shape™: Fitness Evolved*’ and ‘Dance Central™*’, your living room will become a zoo, a stadium, a fitness room or a dance club. You will be in the centre of your entertainment, using the best controller ever made — you,” said Kudo Tsunoda, creative director for Microsoft Game Studios. Microsoft and LucasArts also announced that they will bring Star Wars® to Kinect in 2011. And, sprinkling a little fairy dust on Xbox 360, Disney will bring its magic as well. “Xbox LIVE is about making it simple to find the entertainment you want, with the friends you care about, wherever you are. -

Microsoft Xbox One S 1TB Video Game Console
Xbox One S has over 1,300 games: blockbusters, popular franchises, and Xbox One exclusives. Play with friends, use apps, and enjoy built-in 4K Ultra HD Blu-ray™ and 4K video streaming. High Dynamic Range: Brilliant graphics with High Dynamic Range. Experience richer, more luminous colors in games like Gears of War 4 and Forza Horizon 3. With a higher contrast ratio between lights and darks, High Dynamic Range technology brings out the true visual depth of your games. 4K Resolution: Ultra HD Blu-ray™ and video streaming. Stream 4K Ultra HD video on Netflix, Amazon, Hulu, and more. Watch movies in stunning detail with built-in 4K Ultra HD Blu-rayTM. Spatial Audio: Premium Dolby Atmos and DTS:X audio. Bring your games and movies to life with immersive audio through Dolby Atmos and DTS: X.4 All your entertainment all in one place: With Xbox, you’ll find the best apps, TV, movies, music and sports all in one place, so you’ll never miss a moment. It’s all the entertainment you love. All in one place. Get access to hundreds of apps and services on your Xbox including your favorites like Netflix, Mixer, Spotify, & Sling TV. Stream 4K Ultra HD video on Netflix, Amazon Video, Hulu, and more Rent or buy the latest hit movies and commercial-free TV shows from Microsoft, and watch them using the Movies & TV app, at home or on the go. With our huge catalog of entertainment content, you’ll find something great to watch, including movies in 4K Ultra HD. -

Kinect™ Sports** Caution: Gaming Experience May Soccer, Bowling, Boxing, Beach Volleyball, Change Online Table Tennis, and Track and Field
General KEY GESTURES Your body is the controller! When you’re not using voice control to glide through Kinect Sports: Season Two’s selection GAME MODES screens, make use of these two key navigational gestures. Select a Sport lets you single out a specific sport to play, either alone or HOLD TO SELECT SWIPE with friends (in the same room or over Xbox LIVE). Separate activities To make a selection, stretch To move through multiple based on the sports can also be found here. your arm out and direct pages of a selection screen the on-screen pointer with (when arrows appear to the Quick Play gets you straight into your hand, hovering over a right or left), swipe your arm the competitive sporting action. labelled area of the screen across your body. Split into two teams and nominate until it fills up. players for head-to-head battles while the game tracks your victories. Take on computer GAME MENUS opponents if you’re playing alone. To bring up the Pause menu, hold your left arm out diagonally at around 45° from your body until the Kinect Warranty For Your Copy of Xbox Game Software (“Game”) Acquired in Australia or Guide icon appears. Be sure to face the sensor straight New Zealand on with your legs together and your right arm at your IF YOU ACQUIRED YOUR GAME IN AUSTRALIA OR NEW ZEALAND, THE FOLLOWING side. From this menu you can quit, restart, or access WARRANTY APPLIES TO YOU IN ADDITION the Kinect Tuner if you experience any problems with TO ANY STATUTORY WARRANTIES: Consumer Rights the sensor (or press on an Xbox 360 controller if You may have the benefi t of certain rights or remedies against Microsoft Corpor necessary). -

Volume 1: Setup Volume 1: Installation Volumen 1
Register your Xbox 360 console online today. It only takes a few minutes to join the Xbox community and gain access to exclusive information, rewards and offers. Go to www.xbox.com/registermyxbox Inscrivez votre Console Xbox 360 en ligne dès aujourd'hui Quelques minutes suffisent pour vous joindre à la communauté Xbox et accéder à des informa- tions, récompenses et offres exclusives. Visitez la page www.xbox.com/registermyxbox Registra tu Consola Xbox 360 en línea hoy mismo En sólo unos minutos, únete a la comunidad Xbox y obtén acceso a información exclusiva, premios y ofertas. Visita www.xbox.com/registermyxbox VOLUME 1: SETUP VOLUME 1: INSTALLATION Printed in China VOLUMEN 1: CONFIGURACIÓN 0805 Part Number X11-42612-01 Xbox 360 English 2 Your Xbox 360 Video Game and WARNING Entertainment System Failure to properly set up, use, and care for the Xbox 360 video game system can 3 Select a Location for the increase the risk of serious injury or death, Xbox 360 Console or damage to the Xbox 360 video game 1 English system. Read this manual and the manuals 4 Set Up Your Xbox 360 Video of any peripherals for important safety and Game System health information. Keep all manuals for future reference. For replacement manuals, 6 Connect the Console to Power 25 Français go to www.xbox.com/support or call the Xbox Customer Support number provided on the back cover. 8 The Xbox 360 Wireless Controller Before allowing children to use the Xbox 8 Prepare the Wireless Controller 49 Español 360 video game system: for Use 1 Determine how each child can use the 10 Family Settings Xbox 360 console (playing games, connecting to Xbox Live, replacing 11 Using the Disc Drive batteries, making electrical, AV cable, and network connections) and whether 12 Important Health Warnings About english they should be supervised during these Playing Video Games activities.