Design and Implementation of a Cloud Computing Service for Finite Element
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Reference Manual Ii
GiD The universal, adaptative and user friendly pre and postprocessing system for computer analysis in science and engineering Reference Manual ii Table of Contents Chapters Pag. 1 INTRODUCTION 1 1.1 What's GiD 1 1.2 GiD Manuals 1 2 GENERAL ASPECTS 3 2.1 GiD Basics 3 2.2 Invoking GiD 4 2.2.1 First start 4 2.2.2 Command line flags 5 2.2.3 Command line extra file 6 2.2.4 Settings 6 2.3 User Interface 7 2.3.1 Top menu 9 2.3.2 Toolbars 9 2.3.3 Command line 12 2.3.4 Status and Information 13 2.3.5 Right buttons 13 2.3.6 Mouse operations 13 2.3.7 Classic GiD theme 14 2.4 User Basics 16 2.4.1 Point definition 16 2.4.1.1 Picking in the graphical window 17 2.4.1.2 Entering points by coordinates 17 2.4.1.2.1 Local-global coordinates 17 2.4.1.2.2 Cylindrical coordinates 18 2.4.1.2.3 Spherical coordinates 18 2.4.1.3 Base 19 2.4.1.4 Selecting an existing point 19 2.4.1.5 Point in line 19 2.4.1.6 Point in surface 19 2.4.1.7 Tangent in line 19 2.4.1.8 Normal in surface 19 2.4.1.9 Arc center 19 2.4.1.10 Grid 20 2.4.2 Entity selection 20 2.4.3 Escape 21 2.5 Files Menu 22 2.5.1 New 22 2.5.2 Open 22 2.5.3 Open multiple.. -

Femap Version 11 Fact Sheet
Femap version 11 Benefits Summary • Significant time savings with Femap™ software version 11 from Siemens PLM Software is the latest results data management release of the robust finite element modeling pre- and post-processor for and post-processing engineering simulation and analysis. Femap works in combination with a • Faster model manipulation wide variety of finite element analysis solvers, including the industry- with improved graphics leading NX™ Nastran® application, also from Siemens PLM Software. performance • Easier confidential transfer of The latest release of Femap, version 11, helps improve your productivity model structural data using through more efficient post-processing by allowing separate external results the external superelement files to attach to the Femap database for data access. Graphics performance method has also been improved significantly particularly when displaying and • Increased productivity when rotating large models. Pre-processing now includes the ability to create updating or remeshing surface geometry from legacy shell element models facilitating modeling legacy shell element models updates and changes. Post-processing now includes a streamlined • Better results comprehension XY plotting capability that expedites results review and comprehension through improved XY of model behavior. plotting Version 11 extends the scope of simulation with support for external Features superelement creation and subsequent assembly analysis that allow suppliers • External results data file to transfer model data confidentially. Femap 11 ships with NX Nastran 8.5 attachment to the Femap and brings numerous enhancements that serve to strengthen NX Nastran database integration. In addition, there are many other customer-driven enhancements • Use of graphics memory that included in this latest version of Femap. -
Femap 9.1 Fact Sheet
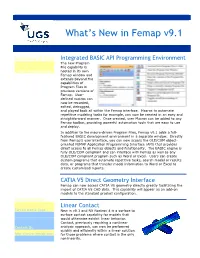
What’s New in Femap v9.1 Summary of New Integrated BASIC API Programming Environment Features The new Program File capability is • New Program File hosted in its own Window Femap window and extends beyond the Application o capabilities of programming Program Files in interface previous versions of o Macro recording, Femap. User- editing, debugging, defined macros can and playback now be recorded, edited, debugged, • CATIA V5 Direct and played back all within the Femap interface. Macros to automate Geometry Access repetitive modeling tasks for example, can now be created in an easy and • Linear Contact straightforward manner. Once created, user Macros can be added to any Femap toolbar, providing powerful automation tools that are easy to use • Spot Weld and deploy. Elements In addition to the macro-driven Program Files, Femap v9.1 adds a full- • New Quad Meshing featured BASIC development environment in a separate window. Directly Option from Femap’s user interface, you can now access the OLE/COM object- • Graphics oriented FEMAP Application Programming Interface (API) that provides Enhancements direct access to all Femap objects and functionality. The BASIC engine is fully OLE/COM compliant and can interface with Femap as well as any • Solver OLE/COM compliant program such as Word or Excel. Users can create Enhancements custom programs that automate repetitive tasks, search model or results data, or programs that transfer model information to Word or Excel to create customized reports. CATIA V5 Direct Geometry Interface Femap can now access CATIA V5 geometry directly greatly facilitating the import of CATIA V5 CAD data. This capability will appear as an add-on module to the standard product configuration. -

The Democratization of Computational Fluid Dynamics
ATA ISSUE TWENTY SUMMER 2020 newsClick to Subscribe Incredible Innovations Engineered with Simcenter The Simcenter software portfolio from Siemens Digital Industries Software combines system simulation, 3D CAE, and test solutions that offer insights throughout the entire product lifecycle. Companies around the world are using tools like Amesim, Femap, Simcenter Nastran, and STAR-CCM+ to develop amazing new products with greater confidence and shorter design cycles. Earlier this summer, the Simcenter blog took a closer look at ten of their favorite Simcenter customer success stories. From analyzing giant street machines with Femap and Simcenter Nastran and optimizing the design of river taxis with STAR-CCM+ to supporting the development of the James Webb Space Telescope, the highlights are as impressive as they are varied. See how Simcenter helped these teams deliver better designs faster. The Democratization Read the article here. of Computational Fluid Dynamics DETAILS INSIDE Calendar of Events 2 Tips and Tricks 3 New Resources 3 inside: Recent News 3 www.ata-plmsoftware.com 844-756-7638 (844-PLM-SOFT) [email protected] 1 Calendar of Events UPCOMING TRAINING CLASSES ATA provides comprehensive training in the use of Femap, Simcenter 3D (formerly NX CAE), and Simcenter Nastran (formerly NX Nastran). Upcoming training classes are shown below. Please visit our website to sign up for these classes or request a custom class. UNTIL FURTHER NOTICE, ALL UPCOMING CLASSES WILL BE HELD VIRTUALLY THROUGH LIVE ONLINE SESSIONS. The FEMAP Democratization NOV 03 Introduction to Femap of Computational Fluid Dynamics TBA Advanced Femap Today, even early startups are able SIMCENTER NASTRAN WITH FEMAP to prove out and refine their product designs digitally using modern software that is practical, accurate, TBA Introduction to Dynamic Analysis and scalable. -
Simcenter Femap Version 2020.1
Simcenter Femap version 2020.1 Nastran®, including support for monitor points and direct matrix inputs (DMIGs), as well as Ansys®, Abaqus® and LS-DYNA®. Simcenter Femap is now being released on a biannual schedule in the spring Benefits Summary and the fall, which began with version • First implementation of synchro- Simcenter™ Femap™ software is a 2019.1 and continues with version nous technology for geometry standalone finite element modeling pre- 2020.1. The software is now referred to modification and postprocessor for engineering sim- as Simcenter Femap to reflect that it is a ulation and analysis. The software is • Streamlined workflows and re-use part of the Simcenter portfolio of CAD-independent and can import of previous data definitions Siemens CAE products. For the same geometry from all major CAD platforms reason, NX™ Nastran® software is now • Upgraded support for various and supports most CAD data formats. Simcenter™ Nastran®. analysis applications Simcenter Femap also works in combi- nation with a wide variety of finite ele- Visualization and user interface Features ment analysis solvers, including the • Updates to UI and preprocessing industry-leading Simcenter Nastran Modernized icons operations software. All icons found throughout the user interface have been modernized to • Improvements to existing meshing The latest release provides a variety of incorporate design elements utilized in functionality improvements that will improve your commercial software applications across productivity across the simulation work- • Added support for simulation all industries. This includes icons on flow. Model creation enhancements entities used in more advanced toolbars, in the menu structure, within consist of more robust editing of geo- solutions dialog boxes and in the model tree, metric features, the ability to align geo- toolboxes and other panes. -

Femap 11 New Features Overview
Siemens PLM Software Femap 11.0 new features White Paper Written for Siemens PLM Software by Tony Abbey, FEA Specialist. www.siemens.com/plm A white paper issued by: Siemens PLM Software. 1 White paper | Femap 11.0 new features Contents Femap 11.0 overview .......................................................3 External superelement support .......................................4 Model performance .........................................................5 Results attachment to the database ................................6 Creating geometry from mesh .........................................8 Splitting a mesh from an edge .......................................10 New entity selection tools .............................................11 Model info tree updates.................................................12 Composite layup creation new features ........................13 Other new composite analysis features .........................14 Contour Model Data tool ................................................15 Bolt preload ...................................................................16 Result postprocessing improvements ............................17 New charting toolbox ....................................................20 Varying translational acceleration via body loads (ACCEL entry) .................................................................22 Nonstructural mass ........................................................23 Conclusion .....................................................................24 A white paper -

Siemens PLM Femap Version 11.1 Fact Sheet
Siemens PLM Software What’s new in Femap 11.1 Enhancing the productivity of finite element analysts Benefits Summary creation and manipulation as well as • Faster model manipulation Femap™ software version 11.1 from meshing and FE model management. with improved graphics Siemens PLM Software is the latest release Version 11.1 extends the scope of performance of the standalone finite element modeling simulation with extensions to the design (FEM) pre- and postprocessor for engineer- • Greater flexibility for optimization capability. Also, there are ing simulation and analysis. Femap can be creating models and several enhancements that strengthen used in combination with a wide variety of extending geometry Nastran integration, including support for finite element (FE) analysis solvers, includ- modeling methods pyramid elements, dynamic response out- ing the industry-leading NX™ Nastran® put and restarts. In addition, there are • Easier FE model creation software. many other customer-driven enhancements and control included in the latest version of Femap. • Faster and more flexible Geometry modeling enhancements postprocessing Non-manifold add • Extended analysis discipline The non-manifold add command added in with enhanced NX Nastran the previous release of Femap introduced integration a method of Boolean adding sheet solids together to form a general body. In Femap version 11.1, this capability has been Femap 11.1 improves user productivity extended to allow user control of a distance through an extension of the results file or separation tolerance facilitating the attach capability that became available in a Boolean add process. prior release. Graphics performance has Non-manifold add multiple bodies also been improved significantly, particu- Imported geometry often contains larly through more efficient graphics discontinuities, which in turn will create a storage and support of OpenGL 4.2 geome- discontiguous mesh if not corrected. -

Capabilities 858.480.2000
www.ata-e.com ata-engineering @ataengineering [email protected] Capabilities 858.480.2000 High-Value Analysis-Driven and Test-Driven Engineering Design Solutions Company ATA Engineering, Inc., (ATA) is an employee-owned small business that has been helping our customers solve their complex engineering problems in the areas of product design, structural dynamics, thermal analysis, aeroelasticity, acoustics, software development, computational fluid dynamics (CFD), structural mechanics, training, and testing since 1977. During that time we have gained a reputation for excellence in the engineering community and have had the opportunity to work on a very wide range of highly engineered products, including military and commercial aircraft, satellites and interplanetary spacecraft, launch vehicles, missile systems, ATA headquarters in San Diego transportation vehicles, mining equipment, rides and equipment for themed entertainment, and a variety of electronic and consumer products. ATA is headquartered in San Diego, with offices in Albuquerque, the Bay Area, Denver, Huntsville, Los Angeles, and Washington D.C. We help our clients find success through advanced engineering solutions. Please contact us to discuss how we can help you with your application. Additional Information Winner of NASA’s George M. Low award Awards Recent Clients h SBA Tibbetts Award h General Atomics h NASA George M. Low Award h Jet Propulsion Laboratory h NASA JPL Thomas H. May Legacy of Excellence h Lockheed Martin Space Systems h SNC Small Business Excellence Award h -
Manage Engineering Data Complex Models and Simulations Yield a Torrent
NX 8 for Design. Smarter decisions, better products. Learn more on page 11 DtopEng_banner_NXCAD_MAR2012.indd 1 3/8/12 11:02 AM April 2012 / deskeng.com Origin 8.6 Overview P.22 Direct Modeling and FEA P.24 TECHNOLOGY FOR DESIGN ENGINEERING Manage Engineering Data Complex models and simulations yield a torrent of data to seize and control. P.16 RACING AHEAD WITH CLUSTERS P.35 REVIEW: HP Z10 WORKSTATION P.38 P.40 PREPARING 3D MODELS de0412_Cover_Darlene.indd 1 3/15/12 12:20 PM Objet.indd 1 3/14/12 11:17 AM DTE_0412_Layout 1 2/28/12 4:36 PM Page 1 Data Loggers & Data Acquisition Systems iNET-400 Series Expandable Modular Data Acquisition System • Directly Connects to Thermocouple, RTD, Thermistor, Strain Gage, Load Complete Cell, Voltage, Current, Resistance Starter and Accelerometer Inputs System $ • USB 2.0 High Speed Data Acquisition 990 Hardware for Windows® ≥XP SP2, Vista or 7 (XP/VS/7) • Analog and Digital Input and Outputs • Free instruNet World Software Visit omega.com/inet-400_series © Kutt Niinepuu / Dreamstime.com Stand-Alone, High-Speed, 8-Channel High Speed Voltage Multifunction Data Loggers Input USB Data Acquisition Modules OM-USB-1208HS Series Starts at $499 High Performance Multi-Function I/O USB Data Acquisition Modules OMB-DAQ-2416 Series OM-LGR-5320 Series Starts at Starts at $1100 $1499 Visit omega.com/om-lgr-5320_series Visit omega.com/om-usb-1208hs_series Visit omega.com/omb-daq-2416 ® omega.com ® © COPYRIGHT 2012 OMEGA ENGINEERING, INC. ALL RIGHTS RESERVED Omega.indd 1 3/14/12 10:54 AM Degrees of Freedom by Jamie J. -

Simcenter Femap Version 2019.1
Simcenter Femap options. There are also several updates to version 2019.1 solver integration for Nastran®, Ansys® and Abaqus®, and new results viewing selections in postprocessing. Visualization and user interface Entity selection Improving simulation productivity Entity selection methods have been enhanced to allow you to select only from those entities that are visible on the screen at the time of selection, using the Benefits Summary new “select visible” icon button on the • Clearer model entity visualization Simcenter™ Femap™ software is now entity selection dialog. and selection being released on a biannual schedule in April and October, beginning with ver- Also, elements can be selected based on • Streamlined workflows and re-use sion 2019.1. The software is now a reference to an orientation node. These of previous data definitions referred to as Simcenter Femap to reflect additions enhance the current array of • Improved robustness for analysis that it is a part of the Simcenter portfolio available tools, making entity selection application support of Siemens CAE products. For the same more versatile and flexible. You’ll also reason, NX™ Nastran® software is now notice that the ID fields in the entity Features Simcenter™ Nastran®. selection and other dialog boxes • Updates to UI and preprocessing throughout Simcenter Femap have been Simcenter Femap is a standalone finite operations widened. element modeling pre- and postproces- • Meshing enhancements including sor for engineering simulation and Previous vector sweep and pyramid mesh transitions analysis. The software is CAD- Simcenter Femap 2019.1 includes the independent and can import geometry • Extended support for nonlinear ability to recall a previously defined from all major CAD platforms and sup- analysis solutions vector in any operation that requires a ports most CAD data formats. -
Femap Student Edition
Femap Student computer-aided engineering (CAE) Edition simulation solution that is widely used in industry, and will prepare you to enter the workforce and stand out in today’s highly competitive economy. Features Femap Student Edition comes with the Leading-edge CAE technology for pre- and postprocessor Femap, along with the NX Nastran solver, both a part students of Siemens PLM Software’s Simcenter portfoio of simulation solutions. Benefits Summary Generally the simulation process starts • Free license of Femap with NX Engineering is an exciting, challenging with a geometric model, and within Nastran software, the same advanced and rewarding discipline that offers a Femap you’ll be able to: simulation solution used in industry diverse range of careers. Engineering simulation is playing an increasingly • Access CAD data from almost any • Early job market penetration by learn- important role at universities. The use source ing industry-leading simulation and of simulation in industry is growing, analysis technology • Clean up and idealize the geometry driven by the need to improve designs, prior to meshing shorten design cycles and reduce costs. The Femap™ Student Edition software • Mesh the geometry to create the includes Femap – an advanced engi- finite element model neering software simulation pre- and • Apply boundary conditions (loads postprocessor for finite element (FE) and constraints) and manage model creation and results review, analysis setup coupled with the industry-standard NX™ Nastran® solver. Together these • Submit the model for analysis by software programs provide a complete NX Nastran • Review the calculated results data and “ There are a lot of features evaluate the model behavior about Femap that really What is included stand out. -

What's New in Solid Edge 2020
What’s new in Solid Edge 2020 Digitalize your product development process and transform your business solidedge.siemens.com The latest version of Solid Edge® software from Siemens Digital Industries provides next-generation technologies that solve today’s toughest product development challenges. With new features such as augmented reality (AR), expanded validation tools, model- based definition, 2D Nesting and extensive enhancements to core computer-aided design (CAD) capabilities, Solid Edge 2020 can be used to enhance collaboration and fully digitalize the design-to- manufacturing process. Mechanical design Visualize and validate your ideas with next-generation technology, from augmented reality to model-based definition. • Augmented reality - Design visualization brings ideas to life, allowing engineers to validate their digital design in a physical environment • Reverse engineering - Integrate next-generation technologies to provide a rapid and simplified way to create a digital twin of a physical product • Model-based definition - Realize significant gains in manufacturing pro- ductivity by using model-based definition, which provides a complete digital characterization of parts and assemblies using 3D design data. Spend less time on engineering documentation and drive downstream validation while minimizing manufacturing errors • Design for additive manufacturing (DfAM) - Streamline Simulation access to the latest manufacturing methods, ensuring Put your designs in motion with simulation tools that are your 3D print is right first