Coronal Heating and Nanoflares: Current Sheet Formation and Heating
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fundamentals of Impulsive Energy Release in the Corona Heliophysics 2050 Workshop White Paper A
Heliophysics 2050 White Papers (2021) 4093.pdf Fundamentals of impulsive energy release in the corona Heliophysics 2050 Workshop white paper A. Y. Shih (NASA Goddard Space Flight Center), L. Glesener (UMN), S. Krucker (UCB), S. Guidoni (Amer. Univ.), S. Christe (GSFC), K. Reeves (SAO), S. Gburek (PAS), A. Caspi (SwRI), M. Alaoui (GSFC/CUA), J. Allred (GSFC), M. Battaglia (FHNW), W. Baumgartner (MSFC), B. Dennis (GSFC), J. Drake (UMD), K. Goetz (UMN), L. Golub (SAO), I. Hannah (Univ. of Glasgow), L. Hayes (GSFC/USRA), G. Holman (GSFC/Emeritus), A. Inglis (GSFC/CUA), J. Ireland (GSFC), G. Kerr (GSFC/CUA), J. Klimchuk (GSFC), D. McKenzie (MSFC), C. Moore (SAO), S. Musset (Univ. of Glasgow), J. Reep (NRL), D. Ryan (GSFC/AU), P. Saint-Hilaire (UCB), S. Savage (MSFC), R. Schwartz (GSFC/AU), D. Seaton (NOAA), M. Stęślicki (PAS), T. Woods (LASP) Introduction Solar eruptive events are the most energetic and geo-effective space-weather drivers. They originate in the corona near the Sun’s surface as a combination of solar flares (impulsive bursts of radiation across the entire electromagnetic spectrum) and coronal mass ejections (CMEs; expulsions of magnetized plasma into interplanetary space). The radiation and energetic particles they produce can damage satellites, disrupt telecommunications and GPS navigation, and endanger astronauts in space. Many of the processes involved in triggering, driving, and sustaining solar eruptive events–including magnetic reconnection, particle acceleration, plasma heating, and energy transport in magnetized plasmas–also play important roles in phenomena throughout the Universe, such as in magnetospheric substorms, gamma-ray bursts, and accretion disks. The Sun is a unique laboratory to better understand these fundamental physical processes. -
Solar Science Timeline Final Wnasa ID
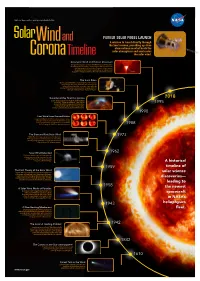
National Aeronautics and Space Administration Solar LAUNCH Windand A mission to travel directly through the Sun’s corona, providing up-close observations on what heats the solar atmosphere and accelerates CoronaTimeline the solar wind. Slow Solar Wind and Helmet Streamers Using observations from the joint ESA/NASA Solar and Heliospheric Observatory, Neil R. Sheeley Jr. and colleagues identify puffs of slow solar wind emanating from helmet streamers — bright areas of the corona that form above magnetically active regions on the photosphere. Exactly how these puffs are formed is still not known. The Sun’s Poles Ulysses, a joint NASA-ESA mission, becomes the first mission to fly over the Sun’s north and south poles. Among other findings, Ulysses found that in periods of minimal solar activity, the fast solar wind comes from the poles, while the slow solar wind comes from equatorial regions. Nanoflares May Heat the Corona 2018 Eugene Parker proposes that frequent, small eruptions on the Sun — known as nanoflares — may heat the corona to its extreme temperatures. The nanoflare 1995 theory contrasts with the wave theory, in which heating is caused by the dissipation of Alfvén waves. 1990 Fast Wind from Coronal Holes Images from Skylab, the U.S.’s first manned space station, identify that the fast solar wind is emitted from coronal holes — comparatively cool regions of the corona where the Sun’s magnetic field lines open out into space. 1988 The Slow and Fast Solar Wind NASA’s Mariner 2 spacecraft observes the solar wind, 1973 detecting two distinct ‘streams’ within it: a slow stream travelling at approximately 215 miles per second, and a fast stream at 430 miles per second. -

1 Solar Wind at 33 AU: Setting Bounds on the Pluto Interaction For
Solar Wind at 33 AU: Setting Bounds on the Pluto Interaction for New Horizons F. Bagenal1, P.A. Delamere2, H. A. Elliott3, M.E. Hill4, C.M. Lisse4, D.J. McComas3,7, R.L McNutt, Jr.4, J.D. Richardson5, C.W. Smith6, D.F. Strobel8 1 University of Colorado, Boulder CO 2 University of Alaska, Fairbanks AK 3 Southwest Research Institute, San Antonio TX 4 ApplieD Physics Laboratory, The Johns Hopkins University, Laurel MD 5 Massachusetts Institute of Technology, CambriDge MA 6 University of New Hampshire, Durham NH 7 University of Texas at San Antonio, San Antonio TX 8 The Johns Hopkins University, Baltimore MD CorresponDing author information: Fran Bagenal Professor of Astrophysical and Planetary Sciences Laboratory for Atmospheric anD Space Physics UCB 600 University of Colorado 3665 Discovery Drive Boulder CO 80303 Tel. 303 492 2598 [email protected] Abstract NASA’s New Horizons spacecraft flies past Pluto on July 14, 2015, carrying two instruments that Detect chargeD particles. Pluto has a tenuous, extenDeD atmosphere that is escaping the planet’s weak gravity. The interaction of the solar wind with Pluto’s escaping atmosphere depends on solar wind conditions as well as the vertical structure of Pluto’s atmosphere. We have analyzeD Voyager 2 particles anD fielDs measurements between 25 anD 39 AU anD present their statistical variations. We have adjusted these predictions to allow for the Sun’s declining activity and solar wind output. We summarize the range of SW conDitions that can be expecteD at 33 AU anD survey the range of scales of interaction that New Horizons might experience. -

Understanding Solar Flares and Coronal Heating at Present
The Case for Comprehensive Spectroscopic Measurements of the Sun: Understanding Solar Flares and Coronal Heating Jeffrey W. Brosius (Catholic University of America at NASA/GSFC) Peter R. Young, James A. Klimchuk (NASA/GSFC) At present the solar physics community’s efforts are largely focused on answering two of the overarching, unresolved questions in the field: (1) What heats the solar corona? (2) What causes the sudden, rapid release of en- ergy that produces flares? Comprehensive spectroscopic measurements are essential to answer these questions. The solar atmosphere along any given line of sight emits optically thin radiation from plasma over widely ranging temperatures. This is true no matter what solar feature is observed, from flares and quiescent active regions to quiet Sun areas and coronal holes. The range of temperature is larger during flares than it is in quiet areas or coronal holes, but in all cases it exceeds an order of magnitude. For example, the temperature of the upper chromosphere is around 20,000 K (log T = 4.3); during flares, plasma is > heated to tens of million Kelvin (log T ∼ 7.3), so the range of temperatures observed along a line of sight can exceed three orders of magnitude. In quiescent active regions the “typical” coronal temperature is around 3 MK, while in coronal holes and quiet Sun areas it is 1 - 2 MK; in these cases the range of temperatures is close to two orders of magnitude. To understand what initiates the release of flare energy, how that energy is transported throughout the flaring region, and how the atmosphere evolves in response, spectroscopic measurements are required over the entire range of temperature that occurs during flares. -
GSFC Heliophysics Science Division 2009 Science Highlights
NASA/TM–2010–215854 GSFC Heliophysics Science Division 2009 Science Highlights Holly R. Gilbert, Keith T. Strong, Julia L.R. Saba, and Yvonne M. Strong, Editors December 2009 Front Cover Caption: Heliophysics image highlights from 2009. For details of these images, see the key on Page v. The NASA STI Program Offi ce … in Profi le Since its founding, NASA has been ded i cated to the • CONFERENCE PUBLICATION. Collected ad vancement of aeronautics and space science. The pa pers from scientifi c and technical conferences, NASA Sci en tifi c and Technical Information (STI) symposia, sem i nars, or other meetings spon sored Pro gram Offi ce plays a key part in helping NASA or co spon sored by NASA. maintain this impor tant role. • SPECIAL PUBLICATION. Scientifi c, techni cal, The NASA STI Program Offi ce is operated by or historical information from NASA pro grams, Langley Research Center, the lead center for projects, and mission, often concerned with sub- NASAʼs scientifi c and technical infor ma tion. The jects having substan tial public interest. NASA STI Program Offi ce pro vides ac cess to the NASA STI Database, the largest collec tion of • TECHNICAL TRANSLATION. En glish-language aero nau ti cal and space science STI in the world. trans la tions of foreign scien tifi c and techni cal ma- The Pro gram Offi ce is also NASAʼs in sti tu tion al terial pertinent to NASAʼs mis sion. mecha nism for dis sem i nat ing the results of its research and devel op ment activ i ties. -

Solar Orbiter and Sentinels
HELEX: Heliophysical Explorers: Solar Orbiter and Sentinels Report of the Joint Science and Technology Definition Team (JSTDT) PRE-PUBLICATION VERSION 1 Contents HELEX Joint Science and Technology Definition Team .................................................................. 3 Executive Summary ................................................................................................................................. 4 1.0 Introduction ........................................................................................................................................ 6 1.1 Heliophysical Explorers (HELEX): Solar Orbiter and the Inner Heliospheric Sentinels ........ 7 2.0 Science Objectives .............................................................................................................................. 8 2.1 What are the origins of the solar wind streams and the heliospheric magnetic field? ............. 9 2.2 What are the sources, acceleration mechanisms, and transport processes of solar energetic particles? ........................................................................................................................................ 13 2.3 How do coronal mass ejections evolve in the inner heliosphere? ............................................. 16 2.4 High-latitude-phase science ......................................................................................................... 19 3.0 Measurement Requirements and Science Implementation ........................................................ 20 -

The Highenergy Sun at High Sensitivity: a Nustar Solar Guest
The High-Energy Sun at High Sensitivity: a NuSTAR Solar Guest Investigation Program A concept paper submitted to the Space Studies Board Heliophysics Decadal Survey by David M. Smith, Säm Krucker, Gordon Hurford, Hugh Hudson, Stephen White, Fiona Harrison (NuSTAR PI), and Daniel Stern (NuSTAR Project Scientist) Figure 1: Artist©s conception of the NuSTAR spacecraft Introduction and Overview Understanding the origin, propagation and fate of non-thermal electrons is an important topic in solar and space physics: it is these particles that present a danger for interplanetary probes and astronauts, and also these particles that carry diagnostic information that can teach us about acceleration processes elsewhere in the heliosphere and throughout the universe. Such non-thermal electrons can be detected via their X-ray or gamma-ray emission, their radio emission, or directly in situ in interplanetary space. To date, the state of the art in solar hard x-ray imaging has been the Reuven Ramaty High Energy Solar Spectroscopic Imager (RHESSI), a NASA Small Explorer satellite launched in 2002, which uses an indirect imaging method (rotating modulation collimators) for hard x-ray imaging. This technique can provide high angular resolution, but it is limited in dynamic range and in sensitivity to small events, due to high background. High-energy imaging of the active Sun is technically easiest in the soft x-ray band (see, for example, the detailed and dynamic images returned by the soft x- ray imager on Hinode, as well as the corresponding telescopes on Yohkoh and GOES), but these x-rays are generally emitted by lower-energy thermal plasmas. -

University of California Santa Cruz Hard X-Ray
UNIVERSITY OF CALIFORNIA SANTA CRUZ HARD X-RAY CONSTRAINTS ON FAINT TRANSIENT EVENTS IN THE SOLAR CORONA A dissertation submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSOPHY in PHYSICS by Andrew J. Marsh June 2017 The Dissertation of Andrew J. Marsh is approved: Professor David M. Smith, Chair Professor Lindsay Glesener Professor David A. Williams Tyrus Miller Vice Provost and Dean of Graduate Studies Table of Contents List of Figures vi List of Tables xv Abstract xvi Dedication xviii Acknowledgments xix 1 Introduction 1 1.1 Origins . .1 1.2 Structure of the Sun . .2 1.2.1 The Interior . .2 1.2.2 Lower Atmosphere . .4 1.2.3 Outer Atmosphere (Corona) . .5 1.3 Solar Cycle . .8 1.4 Summary . .9 2 Flares, Transient Events and Coronal Heating 12 2.1 Flare Physics . 12 2.1.1 Standard Flare Model . 13 2.1.2 Magnetic Reconnection . 14 2.1.3 Particle Acceleration . 17 2.2 Emission from the Solar Corona . 20 2.2.1 Thermal Bremsstrahlung . 21 2.2.2 Non-thermal Bremsstrahlung . 23 2.2.3 Emission Lines . 24 2.3 Observing the Corona . 27 2.3.1 Instruments . 27 2.3.2 Non-Flaring Active Regions . 30 2.3.3 Flares . 31 iii 2.3.4 The Quiet Sun . 33 2.4 The Coronal Heating Problem . 34 2.4.1 Flare Heating . 37 2.4.2 Nanoflare Heating . 38 3 Imaging Hard X-rays with Focusing Optics 42 3.1 Focusing Optics . 42 3.2 FOXSI . 48 3.2.1 Optics . -

1988Apj. . .330. .474P the Astrophysical Journal, 330:474-479
.474P The Astrophysical Journal, 330:474-479,1988 July 1 © 1988. The American Astronomical Society. All rights reserved. Printed in U.S.A. .330. 1988ApJ. NANOFLARES AND THE SOLAR X-RAY CORONA1 E. N. Parker Enrico Fermi Institute and Departments of Physics and Astronomy, University of Chicago Received 1987 October 12; accepted 1987 December 29 ABSTRACT Observations of the Sun with high time and spatial resolution in UV and X-rays show that the emission from small isolated magnetic bipoles is intermittent and impulsive, while the steadier emission from larger bipoles appears as the sum of many individual impulses. We refer to the basic unit of impulsive energy release as a nanoflare. The observations suggest, then, that the active X-ray corona of the Sun is to be understood as a swarm of nanoflares. This interpretation suggests that the X-ray corona is created by the dissipation at the many tangential dis- continuities arising spontaneously in the bipolar fields of the active regions of the Sun as a consequence of random continuous motion of the footpoints of the field in the photospheric convection. The quantitative characteristics of the process are inferred from the observed coronal heat input. Subject headings: hydromagnetics — Sun: corona — Sun: flares I. INTRODUCTION corona. Indeed, it is just that disinclination that allows them to The X-ray corona of the Sun is composed of tenuous wisps penetrate the chromosphere and transition region to reach the of hot gas enclosed in strong (102 G) bipolar magnetic fields. corona. Various ideas have been proposed to facilitate dissi- The high temperature (2-3 x 106 K) of the gas is maintained pation (cf. -

Development of Tearing Instability in a Current Sheet Forming by Sheared Incompressible Flow
Development of tearing instability in a current sheet forming by sheared incompressible flow The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Tolman, Elizabeth A., Nuno F. Loureiro, and Dmitri A. Uzdensky. “Development of Tearing Instability in a Current Sheet Forming by Sheared Incompressible Flow.” Journal of Plasma Physics 84, no. 01 (February 2018). As Published http://dx.doi.org/10.1017/S002237781800017X Publisher Cambridge University Press Version Author's final manuscript Citable link http://hdl.handle.net/1721.1/117098 Terms of Use Creative Commons Attribution-Noncommercial-Share Alike Detailed Terms http://creativecommons.org/licenses/by-nc-sa/4.0/ Under consideration for publication in J. Plasma Phys. 1 Development of Tearing Instability in a Current Sheet Forming by Sheared Incompressible Flow Elizabeth A. Tolman1 , Nuno F. Loureiro1 and Dmitri A. Uzdensky2,3 † 1Plasma Science and Fusion Center, Massachus etts Institute of Technology, Cambridge, Massachusetts 02139, USA 2Center for Integrated Plasma Studies, University of Colorado, Boulder, Colorado 80309, USA 3Institute for Advanced Study, Princeton, NJ 08540, USA (Received xx; revised xx; accepted xx) Sweet-Parker current sheets in high Lundquist number plasmas are unstable to tearing, suggesting they will not form in physical systems. Understanding magnetic reconnection thus requires study of the stability of a current sheet as it forms. Formation can occur due to sheared, sub-Alfv´enic incompressible flows which narrow the sheet. Standard tearing theory (Furth et al. 1963; Coppi et al. 1976; Rutherford 1973) is not immediately appli- cable to such forming sheets for two reasons: first, because the flow introduces terms not present in the standard calculation; second, because the changing equilibrium introduces time dependence to terms which are constant in the standard calculation, complicating the formulation of an eigenvalue problem. -

The Sun's Mysteries from Space - II
GENERAL I ARTICLE The Sun's Mysteries from Space - II B N Dwivedi and A Mohan In the concluding part of our article we discuss problems of coronal heating and coronal holes and solar winds. The Transition Region and Coronal Explorer (TRACE) satel lite, operated by the Stanford-Lockheed Institute for Space Research, went into a polar orbit around Earth in 1998 and has Anita Mohan has been pursuing research in solar extremely impressive imaging capabilities. The spatial resolu physics for over 12 years tion is of the order of 1 arcsecond (725 km), and there are and recently joined as a wavelength bands covering the Fe IX, Fe XII, and Fe XV lines lecturer in Applied Physics, which EIT observes as well as the Ly-alpha line at 121.6 nm. Its Banaras Hindu University. ultraviolet telescope has obtained images containing tremen dous amount of small and varying features - for instance, active region loops are revealed to be only a few hundred kilometers wide, almost thread-like compared to their huge lengths. Their constant flickering and jouncing hint at the corona's heating mechanism. There is a clear relation of these loops and the larger B N Dwivedi does research arches of the general corona to the magnetic field measured in in solar physics and teaches physics in Banaras Hindu the photospheric layer. The crucial role of this magnetic field University. He is involved has only been realized in the past decade. The fields dictate the in almost all the major solar transport of energy between the surface of the Sun and the space experiments, corona. -

Physics of Stellar Coronae
Physics of Stellar Coronae Manuel G¨udel Paul Scherrer Institut, W¨urenlingen and Villigen, CH-5232 Villigen PSI, Switzerland [email protected] 1 Introduction For the plasma physicist, the solar corona offers an outstanding example of a space plasma, and surely one that deserves a lifetime of study. Not only can we observe the solar corona on scales of a few hundred kilometers and monitor its changes in the course of seconds to minutes, we also have a wide range of detailed diagnostics at our disposal that provide immediate access to the prevalent physical processes. Yet, solar physics offers a rich field of unsolved plasma-physical problems. How is the coronal plasma continuously heated to > 106 K? How and where are high-energy particles episodically accelerated? What is the internal dy- namics of plasma in magnetic loops? What is the initial trigger of a coronal flare? How does the corona link to the solar wind, and how and where is the latter accelerated? How is plasma transported into the solar corona? Why, then, study stellar coronae that remain spatially unresolved in X- rays and are only marginally resolved at radio wavelengths, objects that require exposure times of several hours before approximate measurements of the ensemble of plasma structures can be obtained? There are many reasons. In the context of the solar-stellar connection, stellar X-ray astronomy has introduced a range of stellar rotation periods, gravities, masses, and ages into the debate on the magnetic dynamo. Coronal magnetic structures and heating mechanisms may vary together with varia- tions of these parameters.