153 Chapter 8
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fluid Mechanics
MECHANICAL PRINCIPLES HNC/D MOMENTS OF AREA The concepts of first and second moments of area fundamental to several areas of engineering including solid mechanics and fluid mechanics. Students who are not familiar with this concept are advised to complete this tutorial before studying either of these areas. In this section you will do the following. Define the centre of area. Define and calculate 1st. moments of areas. Define and calculate 2nd moments of areas. Derive standard formulae. D.J.Dunn 1 1. CENTROIDS AND FIRST MOMENTS OF AREA A moment about a given axis is something multiplied by the distance from that axis measured at 90o to the axis. The moment of force is hence force times distance from an axis. The moment of mass is mass times distance from an axis. The moment of area is area times the distance from an axis. Fig.1 In the case of mass and area, the problem is deciding the distance since the mass and area are not concentrated at one point. The point at which we may assume the mass concentrated is called the centre of gravity. The point at which we assume the area concentrated is called the centroid. Think of area as a flat thin sheet and the centroid is then at the same place as the centre of gravity. You may think of this point as one where you could balance the thin sheet on a sharp point and it would not tip off in any direction. This section is mainly concerned with moments of area so we will start by considering a flat area at some distance from an axis as shown in Fig.1.2 Fig..2 The centroid is denoted G and its distance from the axis s-s is y. -

Bending Stress
Bending Stress Sign convention The positive shear force and bending moments are as shown in the figure. Figure 40: Sign convention followed. Centroid of an area Scanned by CamScanner If the area can be divided into n parts then the distance Y¯ of the centroid from a point can be calculated using n ¯ Âi=1 Aiy¯i Y = n Âi=1 Ai where Ai = area of the ith part, y¯i = distance of the centroid of the ith part from that point. Second moment of area, or moment of inertia of area, or area moment of inertia, or second area moment For a rectangular section, moments of inertia of the cross-sectional area about axes x and y are 1 I = bh3 x 12 Figure 41: A rectangular section. 1 I = hb3 y 12 Scanned by CamScanner Parallel axis theorem This theorem is useful for calculating the moment of inertia about an axis parallel to either x or y. For example, we can use this theorem to calculate . Ix0 = + 2 Ix0 Ix Ad Bending stress Bending stress at any point in the cross-section is My s = − I where y is the perpendicular distance to the point from the centroidal axis and it is assumed +ve above the axis and -ve below the axis. This will result in +ve sign for bending tensile (T) stress and -ve sign for bending compressive (C) stress. Largest normal stress Largest normal stress M c M s = | |max · = | |max m I S where S = section modulus for the beam. For a rectangular section, the moment of inertia of the cross- 1 3 1 2 sectional area I = 12 bh , c = h/2, and S = I/c = 6 bh . -

Thermodynamics of Spacetime: the Einstein Equation of State
gr-qc/9504004 UMDGR-95-114 Thermodynamics of Spacetime: The Einstein Equation of State Ted Jacobson Department of Physics, University of Maryland College Park, MD 20742-4111, USA [email protected] Abstract The Einstein equation is derived from the proportionality of entropy and horizon area together with the fundamental relation δQ = T dS connecting heat, entropy, and temperature. The key idea is to demand that this relation hold for all the local Rindler causal horizons through each spacetime point, with δQ and T interpreted as the energy flux and Unruh temperature seen by an accelerated observer just inside the horizon. This requires that gravitational lensing by matter energy distorts the causal structure of spacetime in just such a way that the Einstein equation holds. Viewed in this way, the Einstein equation is an equation of state. This perspective suggests that it may be no more appropriate to canonically quantize the Einstein equation than it would be to quantize the wave equation for sound in air. arXiv:gr-qc/9504004v2 6 Jun 1995 The four laws of black hole mechanics, which are analogous to those of thermodynamics, were originally derived from the classical Einstein equation[1]. With the discovery of the quantum Hawking radiation[2], it became clear that the analogy is in fact an identity. How did classical General Relativity know that horizon area would turn out to be a form of entropy, and that surface gravity is a temperature? In this letter I will answer that question by turning the logic around and deriving the Einstein equation from the propor- tionality of entropy and horizon area together with the fundamental relation δQ = T dS connecting heat Q, entropy S, and temperature T . -

Relationship of Structure and Stiffness in Laminated Bamboo Composites
Construction and Building Materials 165 (2018) 241–246 Contents lists available at ScienceDirect Construction and Building Materials journal homepage: www.elsevier.com/locate/conbuildmat Technical note Relationship of structure and stiffness in laminated bamboo composites Matthew Penellum a, Bhavna Sharma b, Darshil U. Shah c, Robert M. Foster c,1, ⇑ Michael H. Ramage c, a Department of Engineering, University of Cambridge, United Kingdom b Department of Architecture and Civil Engineering, University of Bath, United Kingdom c Department of Architecture, University of Cambridge, United Kingdom article info abstract Article history: Laminated bamboo in structural applications has the potential to change the way buildings are con- Received 22 August 2017 structed. The fibrous microstructure of bamboo can be modelled as a fibre-reinforced composite. This Received in revised form 22 November 2017 study compares the results of a fibre volume fraction analysis with previous experimental beam bending Accepted 23 December 2017 results. The link between fibre volume fraction and bending stiffness shows that differences previously attributed to preservation treatment in fact arise due to strip thickness. Composite theory provides a basis for the development of future guidance for laminated bamboo, as validated here. Fibre volume frac- Keywords: tion analysis is an effective method for non-destructive evaluation of bamboo beam stiffness. Microstructure Ó 2018 The Authors. Published by Elsevier Ltd. This is an open access article under the CC BY license (http:// Mechanical properties Analytical modelling creativecommons.org/licenses/by/4.0/). Bamboo 1. Introduction produce a building material [5]. Structural applications are cur- rently limited by a lack of understanding of the properties. -

Centrally Loaded Columns
Ziemian c03.tex V1 - 10/15/2009 4:17pm Page 23 CHAPTER 3 CENTRALLY LOADED COLUMNS 3.1 INTRODUCTION The cornerstone of column theory is the Euler column, a mathematically straight, prismatic, pin-ended, centrally loaded1 strut that is slender enough to buckle without the stress at any point in the cross section exceeding the proportional limit of the material. The buckling load or critical load or bifurcation load (see Chapter 2 for a discussion of the significance of these terms) is defined as π 2EI P = (3.1) E L2 where E is the modulus of elasticity of the material, I is the second moment of area of the cross section about which buckling takes place, and L is the length of the column. The Euler load, P E , is a reference value to which the strengths of actual columns are often compared. If end conditions other than perfectly frictionless pins can be defined mathemat- ically, the critical load can be expressed by π 2EI P = (3.2) E (KL)2 where KL is an effective length defining the portion of the deflected shape between points of zero curvature (inflection points). In other words, KL is the length of an equivalent pin-ended column buckling at the same load as the end-restrained 1Centrally loaded implies that the axial load is applied through the centroidal axis of the member, thus producing no bending or twisting. 23 Ziemian c03.tex V1 - 10/15/2009 4:17pm Page 24 24 CENTRALLY LOADED COLUMNS column. For example, for columns in which one end of the member is prevented from translating with respect to the other end, K can take on values ranging from 0.5 to l.0, depending on the end restraint. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -
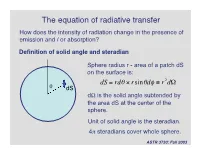
The Equation of Radiative Transfer How Does the Intensity of Radiation Change in the Presence of Emission and / Or Absorption?
The equation of radiative transfer How does the intensity of radiation change in the presence of emission and / or absorption? Definition of solid angle and steradian Sphere radius r - area of a patch dS on the surface is: dS = rdq ¥ rsinqdf ≡ r2dW q dS dW is the solid angle subtended by the area dS at the center of the † sphere. Unit of solid angle is the steradian. 4p steradians cover whole sphere. ASTR 3730: Fall 2003 Definition of the specific intensity Construct an area dA normal to a light ray, and consider all the rays that pass through dA whose directions lie within a small solid angle dW. Solid angle dW dA The amount of energy passing through dA and into dW in time dt in frequency range dn is: dE = In dAdtdndW Specific intensity of the radiation. † ASTR 3730: Fall 2003 Compare with definition of the flux: specific intensity is very similar except it depends upon direction and frequency as well as location. Units of specific intensity are: erg s-1 cm-2 Hz-1 steradian-1 Same as Fn Another, more intuitive name for the specific intensity is brightness. ASTR 3730: Fall 2003 Simple relation between the flux and the specific intensity: Consider a small area dA, with light rays passing through it at all angles to the normal to the surface n: n o In If q = 90 , then light rays in that direction contribute zero net flux through area dA. q For rays at angle q, foreshortening reduces the effective area by a factor of cos(q). -

Area of Polygons and Complex Figures
Geometry AREA OF POLYGONS AND COMPLEX FIGURES Area is the number of non-overlapping square units needed to cover the interior region of a two- dimensional figure or the surface area of a three-dimensional figure. For example, area is the region that is covered by floor tile (two-dimensional) or paint on a box or a ball (three- dimensional). For additional information about specific shapes, see the boxes below. For additional general information, see the Math Notes box in Lesson 1.1.2 of the Core Connections, Course 2 text. For additional examples and practice, see the Core Connections, Course 2 Checkpoint 1 materials or the Core Connections, Course 3 Checkpoint 4 materials. AREA OF A RECTANGLE To find the area of a rectangle, follow the steps below. 1. Identify the base. 2. Identify the height. 3. Multiply the base times the height to find the area in square units: A = bh. A square is a rectangle in which the base and height are of equal length. Find the area of a square by multiplying the base times itself: A = b2. Example base = 8 units 4 32 square units height = 4 units 8 A = 8 · 4 = 32 square units Parent Guide with Extra Practice 135 Problems Find the areas of the rectangles (figures 1-8) and squares (figures 9-12) below. 1. 2. 3. 4. 2 mi 5 cm 8 m 4 mi 7 in. 6 cm 3 in. 2 m 5. 6. 7. 8. 3 units 6.8 cm 5.5 miles 2 miles 8.7 units 7.25 miles 3.5 cm 2.2 miles 9. -

Right Triangles and the Pythagorean Theorem Related?
Activity Assess 9-6 EXPLORE & REASON Right Triangles and Consider △ ABC with altitude CD‾ as shown. the Pythagorean B Theorem D PearsonRealize.com A 45 C 5√2 I CAN… prove the Pythagorean Theorem using A. What is the area of △ ABC? Of △ACD? Explain your answers. similarity and establish the relationships in special right B. Find the lengths of AD‾ and AB‾ . triangles. C. Look for Relationships Divide the length of the hypotenuse of △ ABC VOCABULARY by the length of one of its sides. Divide the length of the hypotenuse of △ACD by the length of one of its sides. Make a conjecture that explains • Pythagorean triple the results. ESSENTIAL QUESTION How are similarity in right triangles and the Pythagorean Theorem related? Remember that the Pythagorean Theorem and its converse describe how the side lengths of right triangles are related. THEOREM 9-8 Pythagorean Theorem If a triangle is a right triangle, If... △ABC is a right triangle. then the sum of the squares of the B lengths of the legs is equal to the square of the length of the hypotenuse. c a A C b 2 2 2 PROOF: SEE EXAMPLE 1. Then... a + b = c THEOREM 9-9 Converse of the Pythagorean Theorem 2 2 2 If the sum of the squares of the If... a + b = c lengths of two sides of a triangle is B equal to the square of the length of the third side, then the triangle is a right triangle. c a A C b PROOF: SEE EXERCISE 17. Then... △ABC is a right triangle. -

Calculus Formulas and Theorems
Formulas and Theorems for Reference I. Tbigonometric Formulas l. sin2d+c,cis2d:1 sec2d l*cot20:<:sc:20 +.I sin(-d) : -sitt0 t,rs(-//) = t r1sl/ : -tallH 7. sin(A* B) :sitrAcosB*silBcosA 8. : siri A cos B - siu B <:os,;l 9. cos(A+ B) - cos,4cos B - siuA siriB 10. cos(A- B) : cosA cosB + silrA sirrB 11. 2 sirrd t:osd 12. <'os20- coS2(i - siu20 : 2<'os2o - I - 1 - 2sin20 I 13. tan d : <.rft0 (:ost/ I 14. <:ol0 : sirrd tattH 1 15. (:OS I/ 1 16. cscd - ri" 6i /F tl r(. cos[I ^ -el : sitt d \l 18. -01 : COSA 215 216 Formulas and Theorems II. Differentiation Formulas !(r") - trr:"-1 Q,:I' ]tra-fg'+gf' gJ'-,f g' - * (i) ,l' ,I - (tt(.r))9'(.,') ,i;.[tyt.rt) l'' d, \ (sttt rrJ .* ('oqI' .7, tJ, \ . ./ stll lr dr. l('os J { 1a,,,t,:r) - .,' o.t "11'2 1(<,ot.r') - (,.(,2.r' Q:T rl , (sc'c:.r'J: sPl'.r tall 11 ,7, d, - (<:s<t.r,; - (ls(].]'(rot;.r fr("'),t -.'' ,1 - fr(u") o,'ltrc ,l ,, 1 ' tlll ri - (l.t' .f d,^ --: I -iAl'CSllLl'l t!.r' J1 - rz 1(Arcsi' r) : oT Il12 Formulas and Theorems 2I7 III. Integration Formulas 1. ,f "or:artC 2. [\0,-trrlrl *(' .t "r 3. [,' ,t.,: r^x| (' ,I 4. In' a,,: lL , ,' .l 111Q 5. In., a.r: .rhr.r' .r r (' ,l f 6. sirr.r d.r' - ( os.r'-t C ./ 7. /.,,.r' dr : sitr.i'| (' .t 8. tl:r:hr sec,rl+ C or ln Jccrsrl+ C ,f'r^rr f 9. -

The American Society of Echocardiography
1 THE AMERICAN SOCIETY OF ECHOCARDIOGRAPHY RECOMMENDATIONS FOR CARDIAC CHAMBER QUANTIFICATION IN ADULTS: A QUICK REFERENCE GUIDE FROM THE ASE WORKFLOW AND LAB MANAGEMENT TASK FORCE Accurate and reproducible assessment of cardiac chamber size and function is essential for clinical care. A standardized methodology creates a common approach to the assessment of cardiac structure and function both within and between echocardiography labs. This facilitates better communication and improves the ability to compare results between studies as well as differentiate normal from abnormal findings in an individual patient. This document summarizes key points from the 2015 ASE Chamber Quantification Guideline and is meant to serve as quick reference for sonographers and interpreting physicians. It is designed to provide guidance on chamber quantification for adult patients; a separate ASE Guidelines document that details recommended quantification methods in the pediatric age group has also been published and should be used for patients <18 years of age (3). (1) For details of the methodology and the rationale for current recommendations, the interested reader is referred to the complete Guideline statement. Figures and tables are reproduced from ASE Guidelines. (1,2) Table of Contents: 1. Left Ventricle (LV) Size and Function p. 2 a. LV Size p. 2 i. Linear Measurements p. 2 ii. Volume Measurements p. 2 iii. LV Mass Calculations p. 3 b. Left Ventricular Function Assessment p. 4 i. Global Systolic Function Parameters p. 4 ii. Regional Function p. 5 2. Right Ventricle (RV) Size and Function p. 6 a. RV Size p. 6 b. RV Function p. 8 3. Atria p. -
Course Objectives Chapter 2 2. Hull Form and Geometry
COURSE OBJECTIVES CHAPTER 2 2. HULL FORM AND GEOMETRY 1. Be familiar with ship classifications 2. Explain the difference between aerostatic, hydrostatic, and hydrodynamic support 3. Be familiar with the following types of marine vehicles: displacement ships, catamarans, planing vessels, hydrofoil, hovercraft, SWATH, and submarines 4. Learn Archimedes’ Principle in qualitative and mathematical form 5. Calculate problems using Archimedes’ Principle 6. Read, interpret, and relate the Body Plan, Half-Breadth Plan, and Sheer Plan and identify the lines for each plan 7. Relate the information in a ship's lines plan to a Table of Offsets 8. Be familiar with the following hull form terminology: a. After Perpendicular (AP), Forward Perpendiculars (FP), and midships, b. Length Between Perpendiculars (LPP or LBP) and Length Overall (LOA) c. Keel (K), Depth (D), Draft (T), Mean Draft (Tm), Freeboard and Beam (B) d. Flare, Tumble home and Camber e. Centerline, Baseline and Offset 9. Define and compare the relationship between “centroid” and “center of mass” 10. State the significance and physical location of the center of buoyancy (B) and center of flotation (F); locate these points using LCB, VCB, TCB, TCF, and LCF st 11. Use Simpson’s 1 Rule to calculate the following (given a Table of Offsets): a. Waterplane Area (Awp or WPA) b. Sectional Area (Asect) c. Submerged Volume (∇S) d. Longitudinal Center of Flotation (LCF) 12. Read and use a ship's Curves of Form to find hydrostatic properties and be knowledgeable about each of the properties on the Curves of Form 13. Calculate trim given Taft and Tfwd and understand its physical meaning i 2.1 Introduction to Ships and Naval Engineering Ships are the single most expensive product a nation produces for defense, commerce, research, or nearly any other function.