Augmenting GPS with Geolocated Fiducials to Improve Accuracy for Mobile Robot Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Comparing Four Methods of Correcting GPS Data: DGPS, WAAS, L-Band, and Postprocessing Dick Karsky, Project Leader
United States Department of Agriculture Engineering Forest Service Technology & Development Program July 2004 0471-2307–MTDC 2200/2300/2400/3400/5100/5300/5400/ 6700/7100 Comparing Four Methods of Correcting GPS Data: DGPS, WAAS, L-Band, and Postprocessing Dick Karsky, Project Leader he global positioning system (GPS) of satellites DGPS Beacon Corrections allows persons with standard GPS receivers to know where they are with an accuracy of 5 meters The U.S. Coast Guard has installed two control centers Tor so. When more precise locations are needed, and more than 60 beacon stations along the coastal errors (table 1) in GPS data must be corrected. A waterways and in the interior United States to transmit number of ways of correcting GPS data have been DGPS correction data that can improve GPS accuracy. developed. Some can correct the data in realtime The beacon stations use marine radio beacon fre- (differential GPS and the wide area augmentation quencies to transmit correction data to the remote GPS system). Others apply the corrections after the GPS receiver. The correction data typically provides 1- to data has been collected (postprocessing). 5-meter accuracy in real time. In theory, all methods of correction should yield similar In principle, this process is quite simple. A GPS receiver results. However, because of the location of different normally calculates its position by measuring the time it reference stations, and the equipment used at those takes for a signal from a satellite to reach its position. stations, the different methods do produce different Because the GPS receiver knows exactly where results. -

Location Corrections Through Differential Networks (LOCD-IN)
Location Corrections through Differential Networks (LOCD-IN) A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University In partial fulfillment of the requirements for the degree Master of Science Russell V. Gilabert December 2018 © 2018 Russell V. Gilabert. All Rights Reserved. 2 This thesis titled Location Corrections through Differential Networks (LOCD-IN) by RUSSELL V. GILABERT has been approved for the School of Electrical Engineering and Computer Science and the Russ College of Engineering and Technology by Maarten Uijt de Haag Edmund K. Cheng Professor of Electrical Engineering and Computer Science Dennis Irwin Dean, Russ College of Engineering and Technology 3 ABSTRACT GILABERT, RUSSELL V., M.S., December 2018, Electrical Engineering Location Corrections through Differential Networks (LOCD-IN) Director of Thesis: Maarten Uijt de Haag Many mobile devices (phones, tablets, smartwatches, etc.) have incorporated embedded GNSS receivers into their designs allowing for wide-spread on-demand positioning. These receivers are typically less capable than dedicated receivers and can have an error of 8-20m. However, future application, such as UAS package delivery, will require higher accuracy positioning. Recently, the raw GPS measurements from these receivers have been made accessible to developers on select mobile devices. This allows GPS augmentation techniques usually reserved for expensive precision-grade receivers to be applied to these low cost embedded receivers. This thesis will explore the effects of various GPS augmentation techniques on these receivers. 4 ACKNOWLEDGMENTS I would like to thank my academic advisor, Maarten Uijt de Haag, for providing guidance and opportunities in both my academic and professional careers. -

And Dual-Frequency GPS and GLONASS Observations on Point Accuracy Under Forest Canopies
Effects of Differential Single- and Dual-Frequency GPS and GLONASS Observations on Point Accuracy under Forest Canopies Erlk Naesset Deckert and Bolstad (1996) and Sigrist et al. (1999) reported A 20-channel, dual-frequency receiver observing dual-fie- accuracies of approximately 3.1 to 4.4 m and 1.8 to 2.5 m for the quency pseudorange and carrier phase of both GPS and average position of 500 and 480 repeated measurements of indi- GLONASS was used to determine the positional accuracy of 29 vidual points under tree canopies, respectively, based on differ- points under tree canopies. The mean positional accuracy ential pseudorange. Nsesset (1999)found that, even under tree based on differential postprocessing of GPS+GLONASS single- canopies, carrier phase observations represent valuable addi- frequency observations ranged from 0.16 m to 1.I 6 m for 2.5 tional information as compared to traditional pseudorange min to 20 min of observation at points with basal area ranging acquisition. By using both single-frequency pseudorange and from <20 m2/ha to 230 m2/ha. The mean positional accuracy carrier phase observations in an adjustment with coordinates of differential postprocessing of dual-frequency GPS+GLONASS and carrier phase ambiguities as unknown parameters (float observations ranged from 0.08 m to 1.35 m. Using the dual- solution), an accuracy of 0.8 m was reported for two 12-chan- frequency carrier phase as main observable and fixing the nel receivers based on 30 min of observation. The correspond- initial integer phase ambiguities, i.e., a fixed solution, gave ing accuracy using pseudorange only was 1.2 to 1.9 m. -
Differential Global Positioning System Navigation Using High-Frequency Ground Wave Transmissions
J. R. VETTER AND W. A. SELLERS TEST AND EVALUATION Differential Global Positioning System Navigation Using High-Frequency Ground Wave Transmissions Jerome R. Vetter and William A. Sellers Since 1992, the Strategic Systems Department of the Applied Physics Laboratory has been investigating the use of high-frequency (HF) ground wave transmissions in the upper HF band for sea-based communications. This effort has examined the optimization of shipboard antennas for two-way communications with ground stations. This article describes early tests using differential Global Positioning System navi- gation for investigating the accuracy of determining a ship’s position from a base station using HF ground wave transmissions. (Keywords: Differential GPS, HF signal transmissions, Kalman filtering, Navigation.) INTRODUCTION In late 1990, the U.S. Coast Guard undertook a reference and remote stations into the system was comprehensive data link study to determine which RF costly. Although the system could provide broadcasts broadcast systems could be used to support differential beyond LOS, it was affected by poor performance due Global Positioning System (DGPS) correction trans- to propagation variations in spite of a predicted 700- missions over the continental United States (CO- km sky wave mode range. NUS) and to determine which radio systems were The purpose of APL’s early high-frequency ground appropriate for a given operating area. The broadcast wave (HFGW) experiments at sea was to improve constraints for the system design had to meet accura- two-way voice and data communications between cies of ±3 m at data rates of 100 bits/s with data submerged submarines and surface ships; previous latencies of less than 4 s. -

Starfire™ GNSS: the Next Generation Starfire Global Satellite Based Augmentation System
StarFire™ GNSS: The Next Generation StarFire Global Satellite Based Augmentation System Chaochao Wang and Ronald Hatch NavCom Technology, Inc. ABSTRACT StarFire receiver hardware and software. NavCom Technology has made numerous advancements in NavCom’s next generation StarFire GNSS system Satellite Based Augmentation Systems (SBAS) over performance is described in this paper. The StarFire the past 15 years and has continued to improve GNSS system is a Global Satellite Based receiver performance to a customer base that now Augmentation System (GSBAS) developed entirely consists of multiple thousands of users. The first by NavCom Technology. Significant improvements StarFire Wide Area Differential GPS correction have been made to each component of the system service, originally named Wide Area Correction including the ground reference network, new Transform (WCT), was introduced by NavCom in proprietary real-time orbit and clock generation, dual 1998. Like the current system it used dual- redundant delivery of corrections via commercial frequency GPS measurements for navigation and communication satellites, and the GNSS receiver precise point positioning. This continental WADGPS navigation software. Among the most significant StarFire system delivered better than 30cm position improvements is the incorporation of orbit and clock accuracy for users in North America. corrections for GLONASS satellites. At the same time, the orbital and clock correction accuracy for In 2002, NavCom introduced a truly global StarFire GPS satellites has been dramatically improved and GPS augmentation service. Using a global reference the receiver navigation software has been modified receiver network and an enhanced version of the to take advantage of both the GLONASS satellites Real-Time GIPSY (RTG) clock and orbital correction and the improved orbit and clock accuracy for GPS. -

Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test
electronics Technical Note Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test Cheolsoon Lim 1, Hyojung Yoon 1, Am Cho 2, Chang-Sun Yoo 2 and Byungwoon Park 1,* 1 School of Aerospace Engineering, Sejong University, 209 Neungdong-ro, Gwangjin-gu, Seoul 05006, Korea; [email protected] (C.L.); [email protected] (H.Y.) 2 Future Aircraft Research Division, Korea Aerospace Research Institute, Daejeon 34133, Korea; [email protected] (A.C.); [email protected] (C.-S.Y.) * Correspondence: [email protected]; Tel.: +82-02-3408-4385 Received: 20 November 2019; Accepted: 7 December 2019; Published: 11 December 2019 Abstract: The performance of global navigation satellite system (GNSS) receivers in dynamic modes is mostly assessed using results obtained from independent maneuvering of vehicles along similar trajectories at different times due to limitations of receivers, payload, space, and power of moving vehicles. However, such assessments do not ensure valid evaluation because the same GNSS signal environment cannot be ensured in a different test session irrespective of how accurately it mimics the original session. In this study, we propose a valid methodology that can evaluate the dynamic performance of multiple GNSS receivers in various positioning modes with only one dynamic test. We used the record-and-replay function of RACELOGIC’s LabSat3 Wideband and developed a software that can log and re-broadcast Radio Technical Commission for Maritime Services (RTCM) messages for the augmented systems. A preliminary static test and a drone test were performed to verify proper operation of the system. -
Overview of GNSS Navigation Sources, Augmentation Systems, and Applications
Overview of GNSS Navigation Sources, Augmentation Systems, and Applications The Ionosphere and its Effects on GNSS Systems 14 to 16 April 2008 Santiago, Chile Dr. S. Vincent Massimini © 2008 The MITRE Corporation. All rights reserved. Global Navigation Satellite Systems (GNSS) • Global Positioning System (GPS) – U.S. Satellites • GLONASS (Russia) – Similar concept • Technically different • Future: GALILEO – “Euro-GPS” • Future: Beidou/Compass 13 of 301 © 2008 The MITRE Corporation. All rights reserved. GPS 14 of 301 © 2008 The MITRE Corporation. All rights reserved. Basic Global Positioning System (GPS) Space Segment User Segment Ground Segment 15 of 301 © 2008 The MITRE Corporation. All rights reserved. GPS Nominal System • 24 Satellites (SV) • 6 Orbital Planes • 4 Satellites per Plane • 55 Degree Inclinations • 10,898 Miles Height • 12 Hour Orbits • 16 Monitor Stations • 4 Uplink Stations 16 of 301 © 2008 The MITRE Corporation. All rights reserved. GPS Availability Standards and Achieved Performance “In support of the service availability standard, 24 operational satellites must be available on orbit with 0.95 probability (averaged over any day). At least 21 satellites in the 24 nominal plane/slot positions must be set healthy and transmitting a navigation signal with 0.98 probability (yearly averaged).” Historical GPS constellation performance has been significantly better than the standard. Source: “Global Positioning System Standard Positioning Service Performance 17 of 301 Standard” October 2001 © 2008 The MITRE Corporation. All rights reserved. GPS Constellation Status (30 March 2008) • 30 Healthy Satellites – 12 Block IIR satellites – 13 Block IIA satellites – 6 Block IIR-M satellites • 2 additional IIR-M satellites to launch • Since December 1993, U.S. -

Accuracy Improvement of DGPS for Low-Cost Single-Frequency Receiver Using Modified Flächen Korrektur Parameter Correction
International Journal of Geo-Information Article Accuracy Improvement of DGPS for Low-Cost Single-Frequency Receiver Using Modified Flächen Korrektur Parameter Correction Jungbeom Kim 1, Junesol Song 1, Heekwon No 1, Deokhwa Han 1, Donguk Kim 1, Byungwoon Park 2,* and Changdon Kee 1,* 1 School of Mechanical and Aerospace Engineering and Institute of Advanced Aerospace Technology, Seoul National University, 1 Gwanak-ro, Gwanak-gu, Seoul 08826, Korea; [email protected] (J.K.); [email protected] (J.S.); [email protected] (H.N.); [email protected] (D.H.); [email protected] (D.K.) 2 School of Aerospace Engineering, Sejong University, 209 Neungdong-ro, Gwangjin-gu, Seoul 05006, Korea * Correspondence: [email protected] (B.P.); [email protected] (C.K.); Tel.: +82-02-3408-4385 (B.P.); +82-02-880-1912 (C.K.) Academic Editor: Wolfgang Kainz Received: 17 June 2017; Accepted: 18 July 2017; Published: 20 July 2017 Abstract: A differential global positioning system (DGPS) is one of the most widely used augmentation systems for a low-cost L1 (1575.42 MHz) single-frequency GPS receiver. The positioning accuracy of a low-cost GPS receiver decreases because of the spatial decorrelation between the reference station (RS) of the DGPS and the users. Hence, a network real-time kinematic (RTK) solution is used to reduce the decorrelation error in the current DGPS system. Among the various network RTK methods, the Flächen Korrektur parameter (FKP) is used to complement the current DGPS, because its concept and system configuration are simple and the size of additional data required for the network RTK is small. -

Edloran – Next Generation of Differential Loran
eDLoran – next generation of differential Loran Durk van Willigen1, René Kellenbach2, Cees Dekker3 and Wim van Buuren4 1 Reelektronika, Netherlands, [email protected] 2 Reelektronika, Netherlands, [email protected] 3 Reelektronika, Netherlands, [email protected] 4 Dutch Pilots’ Corporation, Netherlands, [email protected] Abstract: To counteract vulnerability of GNSS, dissimilar backup systems are needed for harbour approaches. Rotterdam pilots want accuracies of 5 metres for such systems. Loran is likely the best basic candidate for this. Reelektronika has, on request of, and in close cooperation with the Rotterdam Pilots, developed and tested a new differential Loran system called eDLoran, enhanced Differential Loran. Extensive research made clear that 5-metre accuracy cannot be met by the currently tested DLoran system. The main reason for that is twofold: latency of the broadcast (Eurofix) DLoran data is far too large causing loss of temporal correlation, and, accurately measuring correction data (ASF) is in a technical sense problematic. Therefore, a much simpler and more accurate method of measuring ASF data has been applied. Finally, the construction of enhanced differential Loran reference stations showed to be much less complex and expensive. For pilots’ use it is also needed that the equipment is wireless, portable, small, and battery-powered. A full prototype eDLoran system has been implemented and extensively tested in the Europort area. Instead of applying the usual pseudorange correction technique, well known in the GNSS world, position corrections are used instead. To reduce correction data latency by at least one to two orders of magnitude, standard mobile telecom networks and the Internet are used. -
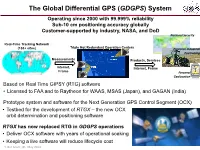
The Global Differential GPS (GDGPS) System
The Global Differential GPS (GDGPS) System Operating since 2000 with 99.999% reliability Sub-10 cm positioning accuracy globally Customer-supported by industry, NASA, and DoD National Security Real-Time Tracking Network Triple Hot Redundant Operation Centers (100+ sites) Precision Industrial Positioning Measurements Products, Services Internet, Internet, Frame Frame Personal Geolocation Based on Real Time GIPSY (RTG) software • Licensed to FAA and to Raytheon for WAAS, MSAS (Japan), and GAGAN (India) Prototype system and software for the Next Generation GPS Control Segment (OCX) • Testbed for the development of RTGX – the new OCX orbit determination and positioning software RTGX has now replaced RTG in GDGPS operations • Deliver OCX software with years of operational soaking • Keeping a live software will reduce lifecycle cost Y. Bar-Sever, JPL. May 2013 GDGPS Product Line and Applications Provide Mission Critical Services and Societal Benefits Assisted GPS Precise positioning anywhere Integrity monitoring and situational awareness Space weather monitoring Free public services: Automatic Precise Positioning Service (APPS) Tsunami prediction Repeat path interferometry with UAV-SAR GREAT Alert: Natural hazards monitoring and predictions Y. Bar-Sever, JPL. May 2013 Real-Time Point Positioning Accuracy < 6 cm 1D RMS for high-quality dual-frequency GPS or GPS/GLONASS sites The addition of properly- modeled GLONASS data slightly improves positioning, most of the time… Y. Bar-Sever, JPL. May 2013 Full GNSS and Modernized Signals Capability Monitoring -

Basics of the GPS Technique: Observation Equations§
Basics of the GPS Technique: Observation Equations§ Geoffrey Blewitt Department of Geomatics, University of Newcastle Newcastle upon Tyne, NE1 7RU, United Kingdom [email protected] Table of Contents 1. INTRODUCTION.....................................................................................................................................................2 2. GPS DESCRIPTION................................................................................................................................................2 2.1 THE BASIC IDEA ........................................................................................................................................................2 2.2 THE GPS SEGMENTS..................................................................................................................................................3 2.3 THE GPS SIGNALS .....................................................................................................................................................6 3. THE PSEUDORANGE OBSERVABLE ................................................................................................................8 3.1 CODE GENERATION....................................................................................................................................................9 3.2 AUTOCORRELATION TECHNIQUE .............................................................................................................................12 3.3 PSEUDORANGE OBSERVATION EQUATIONS..............................................................................................................13 -

Differential Gps: Concepts and Quality Control
DIFFERENTIAL GPS: CONCEPTS AND QUALITY CONTROL prof.dr.ir. P.J.G. Teunissen Delft Geodetic Computing Centre (LGR) Department of Geodesy Delft University of Technology Thijsseweg II, 2629 JA Delft The Netherlands INVITED LECTURE for the Netherlands Institute of Navigation (NIN) .Amsterdam, September 27 1991 Copyright © by P.J.G. Teunissen Delft Geodetic Computing Centre (LGR) ThiJsseweg ii, 2629 JA DELFT, The Netherlands CONTENTS 1. INTRODUCTION 1 2. GPS-OBSERVABLES AND SINGLE POINT POSITIONING .............•.. 2 2. 1. The pseudo range observable ....................•....... 2 2.2. Single point positioning .............•.........•....•.. 3 2.3. The carrier phase observable 9 3. RELATIVE POSITIONING WITH GPS ........................•...... 11 3.1. Static GPS surveying 12 3.2. Semi-kinematic GPS surveying 19 3.3. Kinematic GPS surveying 23 3.4. DGPS navigation 2S 4. QUAL ITY CONTROL ...................................•......... 32 4. 1. Introduction .....................................•..... 32 4.2. On GPS-based civil aviation quality monitoring ...•..... 33 4.3. Detection and Identification 3S 4.4. Reliability 38 S. REFERENCES ......•.....•.................................•... 43 1. INTRODUCTION The satellite-based Global Positioning System (GPS) is rapidly becoming the major positioning system for a variety of geodetic applications. \lith the completion of the satellite constellation in the early 1990s, the system will provide 24-hour all-weather precise positioning capabilities that extend to virtually all parts of the globe. Positioning with GPS can be divided into single-receiver single point positioning and multi-receiver positioning relative to a simultaneously observing reference receiver. Although the GPS system has originally been designed for single point positioning to support military navigation needs, LAN D SEA AIR o Geodynamics (plate o Hydrographic survey o Aero-triangulation tectonics, sealevel ing (0.