Generalized Pseudoforest Deletion: Algorithms and Uniform Kernel⋆
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
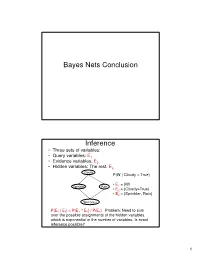
Bayes Nets Conclusion Inference
Bayes Nets Conclusion Inference • Three sets of variables: • Query variables: E1 • Evidence variables: E2 • Hidden variables: The rest, E3 Cloudy P(W | Cloudy = True) • E = {W} Sprinkler Rain 1 • E2 = {Cloudy=True} • E3 = {Sprinkler, Rain} Wet Grass P(E 1 | E 2) = P(E 1 ^ E 2) / P(E 2) Problem: Need to sum over the possible assignments of the hidden variables, which is exponential in the number of variables. Is exact inference possible? 1 A Simple Case A B C D • Suppose that we want to compute P(D = d) from this network. A Simple Case A B C D • Compute P(D = d) by summing the joint probability over all possible values of the remaining variables A, B, and C: P(D === d) === ∑∑∑ P(A === a, B === b,C === c, D === d) a,b,c 2 A Simple Case A B C D • Decompose the joint by using the fact that it is the product of terms of the form: P(X | Parents(X)) P(D === d) === ∑∑∑ P(D === d | C === c)P(C === c | B === b)P(B === b | A === a)P(A === a) a,b,c A Simple Case A B C D • We can avoid computing the sum for all possible triplets ( A,B,C) by distributing the sums inside the product P(D === d) === ∑∑∑ P(D === d | C === c)∑∑∑P(C === c | B === b)∑∑∑P(B === b| A === a)P(A === a) c b a 3 A Simple Case A B C D This term depends only on B and can be written as a 2- valued function fA(b) P(D === d) === ∑∑∑ P(D === d | C === c)∑∑∑P(C === c | B === b)∑∑∑P(B === b| A === a)P(A === a) c b a A Simple Case A B C D This term depends only on c and can be written as a 2- valued function fB(c) === === === === === === P(D d) ∑∑∑ P(D d | C c)∑∑∑P(C c | B b)f A(b) c b …. -

Graph Varieties Axiomatized by Semimedial, Medial, and Some Other Groupoid Identities
Discussiones Mathematicae General Algebra and Applications 40 (2020) 143–157 doi:10.7151/dmgaa.1344 GRAPH VARIETIES AXIOMATIZED BY SEMIMEDIAL, MEDIAL, AND SOME OTHER GROUPOID IDENTITIES Erkko Lehtonen Technische Universit¨at Dresden Institut f¨ur Algebra 01062 Dresden, Germany e-mail: [email protected] and Chaowat Manyuen Department of Mathematics, Faculty of Science Khon Kaen University Khon Kaen 40002, Thailand e-mail: [email protected] Abstract Directed graphs without multiple edges can be represented as algebras of type (2, 0), so-called graph algebras. A graph is said to satisfy an identity if the corresponding graph algebra does, and the set of all graphs satisfying a set of identities is called a graph variety. We describe the graph varieties axiomatized by certain groupoid identities (medial, semimedial, autodis- tributive, commutative, idempotent, unipotent, zeropotent, alternative). Keywords: graph algebra, groupoid, identities, semimediality, mediality. 2010 Mathematics Subject Classification: 05C25, 03C05. 1. Introduction Graph algebras were introduced by Shallon [10] in 1979 with the purpose of providing examples of nonfinitely based finite algebras. Let us briefly recall this concept. Given a directed graph G = (V, E) without multiple edges, the graph algebra associated with G is the algebra A(G) = (V ∪ {∞}, ◦, ∞) of type (2, 0), 144 E. Lehtonen and C. Manyuen where ∞ is an element not belonging to V and the binary operation ◦ is defined by the rule u, if (u, v) ∈ E, u ◦ v := (∞, otherwise, for all u, v ∈ V ∪ {∞}. We will denote the product u ◦ v simply by juxtaposition uv. Using this representation, we may view any algebraic property of a graph algebra as a property of the graph with which it is associated. -

Networkx: Network Analysis with Python
NetworkX: Network Analysis with Python Salvatore Scellato Full tutorial presented at the XXX SunBelt Conference “NetworkX introduction: Hacking social networks using the Python programming language” by Aric Hagberg & Drew Conway Outline 1. Introduction to NetworkX 2. Getting started with Python and NetworkX 3. Basic network analysis 4. Writing your own code 5. You are ready for your project! 1. Introduction to NetworkX. Introduction to NetworkX - network analysis Vast amounts of network data are being generated and collected • Sociology: web pages, mobile phones, social networks • Technology: Internet routers, vehicular flows, power grids How can we analyze this networks? Introduction to NetworkX - Python awesomeness Introduction to NetworkX “Python package for the creation, manipulation and study of the structure, dynamics and functions of complex networks.” • Data structures for representing many types of networks, or graphs • Nodes can be any (hashable) Python object, edges can contain arbitrary data • Flexibility ideal for representing networks found in many different fields • Easy to install on multiple platforms • Online up-to-date documentation • First public release in April 2005 Introduction to NetworkX - design requirements • Tool to study the structure and dynamics of social, biological, and infrastructure networks • Ease-of-use and rapid development in a collaborative, multidisciplinary environment • Easy to learn, easy to teach • Open-source tool base that can easily grow in a multidisciplinary environment with non-expert users -

Counting Independent Sets in Graphs with Bounded Bipartite Pathwidth∗
Counting independent sets in graphs with bounded bipartite pathwidth∗ Martin Dyery Catherine Greenhillz School of Computing School of Mathematics and Statistics University of Leeds UNSW Sydney, NSW 2052 Leeds LS2 9JT, UK Australia [email protected] [email protected] Haiko M¨uller∗ School of Computing University of Leeds Leeds LS2 9JT, UK [email protected] 7 August 2019 Abstract We show that a simple Markov chain, the Glauber dynamics, can efficiently sample independent sets almost uniformly at random in polynomial time for graphs in a certain class. The class is determined by boundedness of a new graph parameter called bipartite pathwidth. This result, which we prove for the more general hardcore distribution with fugacity λ, can be viewed as a strong generalisation of Jerrum and Sinclair's work on approximately counting matchings, that is, independent sets in line graphs. The class of graphs with bounded bipartite pathwidth includes claw-free graphs, which generalise line graphs. We consider two further generalisations of claw-free graphs and prove that these classes have bounded bipartite pathwidth. We also show how to extend all our results to polynomially-bounded vertex weights. 1 Introduction There is a well-known bijection between matchings of a graph G and independent sets in the line graph of G. We will show that we can approximate the number of independent sets ∗A preliminary version of this paper appeared as [19]. yResearch supported by EPSRC grant EP/S016562/1 \Sampling in hereditary classes". zResearch supported by Australian Research Council grant DP190100977. 1 in graphs for which all bipartite induced subgraphs are well structured, in a sense that we will define precisely. -

1 Hamiltonian Path
6.S078 Fine-Grained Algorithms and Complexity MIT Lecture 17: Algorithms for Finding Long Paths (Part 1) November 2, 2020 In this lecture and the next, we will introduce a number of algorithmic techniques used in exponential-time and FPT algorithms, through the lens of one parametric problem: Definition 0.1 (k-Path) Given a directed graph G = (V; E) and parameter k, is there a simple path1 in G of length ≥ k? Already for this simple-to-state problem, there are quite a few radically different approaches to solving it faster; we will show you some of them. We’ll see algorithms for the case of k = n (Hamiltonian Path) and then we’ll turn to “parameterizing” these algorithms so they work for all k. A number of papers in bioinformatics have used quick algorithms for k-Path and related problems to analyze various networks that arise in biology (some references are [SIKS05, ADH+08, YLRS+09]). In the following, we always denote the number of vertices jV j in our given graph G = (V; E) by n, and the number of edges jEj by m. We often associate the set of vertices V with the set [n] := f1; : : : ; ng. 1 Hamiltonian Path Before discussing k-Path, it will be useful to first discuss algorithms for the famous NP-complete Hamiltonian path problem, which is the special case where k = n. Essentially all algorithms we discuss here can be adapted to obtain algorithms for k-Path! The naive algorithm for Hamiltonian Path takes time about n! = 2Θ(n log n) to try all possible permutations of the nodes (which can also be adapted to get an O?(k!)-time algorithm for k-Path, as we’ll see). -

Network Analysis of the Multimodal Freight Transportation System in New York City
Network Analysis of the Multimodal Freight Transportation System in New York City Project Number: 15 – 2.1b Year: 2015 FINAL REPORT June 2018 Principal Investigator Qian Wang Researcher Shuai Tang MetroFreight Center of Excellence University at Buffalo Buffalo, NY 14260-4300 Network Analysis of the Multimodal Freight Transportation System in New York City ABSTRACT The research is aimed at examining the multimodal freight transportation network in the New York metropolitan region to identify critical links, nodes and terminals that affect last-mile deliveries. Two types of analysis were conducted to gain a big picture of the region’s freight transportation network. First, three categories of network measures were generated for the highway network that carries the majority of last-mile deliveries. They are the descriptive measures that demonstrate the basic characteristics of the highway network, the network structure measures that quantify the connectivity of nodes and links, and the accessibility indices that measure the ease to access freight demand, services and activities. Second, 71 multimodal freight terminals were selected and evaluated in terms of their accessibility to major multimodal freight demand generators such as warehousing establishments. As found, the most important highways nodes that are critical in terms of connectivity and accessibility are those in and around Manhattan, particularly the bridges and tunnels connecting Manhattan to neighboring areas. Major multimodal freight demand generators, such as warehousing establishments, have better accessibility to railroad and marine port terminals than air and truck terminals in general. The network measures and findings in the research can be used to understand the inventory of the freight network in the system and to conduct freight travel demand forecasting analysis. -

Density Theorems for Bipartite Graphs and Related Ramsey-Type Results
Density theorems for bipartite graphs and related Ramsey-type results Jacob Fox Benny Sudakov Princeton UCLA and IAS Ramsey’s theorem Definition: r(G) is the minimum N such that every 2-edge-coloring of the complete graph KN contains a monochromatic copy of graph G. Theorem: (Ramsey-Erdos-Szekeres,˝ Erdos)˝ t/2 2t 2 ≤ r(Kt ) ≤ 2 . Question: (Burr-Erd˝os1975) How large is r(G) for a sparse graph G on n vertices? Ramsey numbers for sparse graphs Conjecture: (Burr-Erd˝os1975) For every d there exists a constant cd such that if a graph G has n vertices and maximum degree d, then r(G) ≤ cd n. Theorem: 1 (Chv´atal-R¨odl-Szemer´edi-Trotter 1983) cd exists. 2αd 2 (Eaton 1998) cd ≤ 2 . βd αd log2 d 3 (Graham-R¨odl-Ruci´nski2000) 2 ≤ cd ≤ 2 . Moreover, if G is bipartite, r(G) ≤ 2αd log d n. Density theorem for bipartite graphs Theorem: (F.-Sudakov) Let G be a bipartite graph with n vertices and maximum degree d 2 and let H be a bipartite graph with parts |V1| = |V2| = N and εN edges. If N ≥ 8dε−d n, then H contains G. Corollary: For every bipartite graph G with n vertices and maximum degree d, r(G) ≤ d2d+4n. (D. Conlon independently proved that r(G) ≤ 2(2+o(1))d n.) Proof: Take ε = 1/2 and H to be the graph of the majority color. Ramsey numbers for cubes Definition: d The binary cube Qd has vertex set {0, 1} and x, y are adjacent if x and y differ in exactly one coordinate. -

Matroid Theory
MATROID THEORY HAYLEY HILLMAN 1 2 HAYLEY HILLMAN Contents 1. Introduction to Matroids 3 1.1. Basic Graph Theory 3 1.2. Basic Linear Algebra 4 2. Bases 5 2.1. An Example in Linear Algebra 6 2.2. An Example in Graph Theory 6 3. Rank Function 8 3.1. The Rank Function in Graph Theory 9 3.2. The Rank Function in Linear Algebra 11 4. Independent Sets 14 4.1. Independent Sets in Graph Theory 14 4.2. Independent Sets in Linear Algebra 17 5. Cycles 21 5.1. Cycles in Graph Theory 22 5.2. Cycles in Linear Algebra 24 6. Vertex-Edge Incidence Matrix 25 References 27 MATROID THEORY 3 1. Introduction to Matroids A matroid is a structure that generalizes the properties of indepen- dence. Relevant applications are found in graph theory and linear algebra. There are several ways to define a matroid, each relate to the concept of independence. This paper will focus on the the definitions of a matroid in terms of bases, the rank function, independent sets and cycles. Throughout this paper, we observe how both graphs and matrices can be viewed as matroids. Then we translate graph theory to linear algebra, and vice versa, using the language of matroids to facilitate our discussion. Many proofs for the properties of each definition of a matroid have been omitted from this paper, but you may find complete proofs in Oxley[2], Whitney[3], and Wilson[4]. The four definitions of a matroid introduced in this paper are equiv- alent to each other. -

Tree Structures
Tree Structures Definitions: o A tree is a connected acyclic graph. o A disconnected acyclic graph is called a forest o A tree is a connected digraph with these properties: . There is exactly one node (Root) with in-degree=0 . All other nodes have in-degree=1 . A leaf is a node with out-degree=0 . There is exactly one path from the root to any leaf o The degree of a tree is the maximum out-degree of the nodes in the tree. o If (X,Y) is a path: X is an ancestor of Y, and Y is a descendant of X. Root X Y CSci 1112 – Algorithms and Data Structures, A. Bellaachia Page 1 Level of a node: Level 0 or 1 1 or 2 2 or 3 3 or 4 Height or depth: o The depth of a node is the number of edges from the root to the node. o The root node has depth zero o The height of a node is the number of edges from the node to the deepest leaf. o The height of a tree is a height of the root. o The height of the root is the height of the tree o Leaf nodes have height zero o A tree with only a single node (hence both a root and leaf) has depth and height zero. o An empty tree (tree with no nodes) has depth and height −1. o It is the maximum level of any node in the tree. CSci 1112 – Algorithms and Data Structures, A. -

A Simple Linear-Time Algorithm for Finding Path-Decompostions of Small Width
Introduction Preliminary Definitions Pathwidth Algorithm Summary A Simple Linear-Time Algorithm for Finding Path-Decompostions of Small Width Kevin Cattell Michael J. Dinneen Michael R. Fellows Department of Computer Science University of Victoria Victoria, B.C. Canada V8W 3P6 Information Processing Letters 57 (1996) 197–203 Kevin Cattell, Michael J. Dinneen, Michael R. Fellows Linear-Time Path-Decomposition Algorithm Introduction Preliminary Definitions Pathwidth Algorithm Summary Outline 1 Introduction Motivation History 2 Preliminary Definitions Boundaried graphs Path-decompositions Topological tree obstructions 3 Pathwidth Algorithm Main result Linear-time algorithm Proof of correctness Other results Kevin Cattell, Michael J. Dinneen, Michael R. Fellows Linear-Time Path-Decomposition Algorithm Introduction Preliminary Definitions Motivation Pathwidth Algorithm History Summary Motivation Pathwidth is related to several VLSI layout problems: vertex separation link gate matrix layout edge search number ... Usefullness of bounded treewidth in: study of graph minors (Robertson and Seymour) input restrictions for many NP-complete problems (fixed-parameter complexity) Kevin Cattell, Michael J. Dinneen, Michael R. Fellows Linear-Time Path-Decomposition Algorithm Introduction Preliminary Definitions Motivation Pathwidth Algorithm History Summary History General problem(s) is NP-complete Input: Graph G, integer t Question: Is tree/path-width(G) ≤ t? Algorithmic development (fixed t): O(n2) nonconstructive treewidth algorithm by Robertson and Seymour (1986) O(nt+2) treewidth algorithm due to Arnberg, Corneil and Proskurowski (1987) O(n log n) treewidth algorithm due to Reed (1992) 2 O(2t n) treewidth algorithm due to Bodlaender (1993) O(n log2 n) pathwidth algorithm due to Ellis, Sudborough and Turner (1994) Kevin Cattell, Michael J. Dinneen, Michael R. -

Networkx Reference Release 1.9.1
NetworkX Reference Release 1.9.1 Aric Hagberg, Dan Schult, Pieter Swart September 20, 2014 CONTENTS 1 Overview 1 1.1 Who uses NetworkX?..........................................1 1.2 Goals...................................................1 1.3 The Python programming language...................................1 1.4 Free software...............................................2 1.5 History..................................................2 2 Introduction 3 2.1 NetworkX Basics.............................................3 2.2 Nodes and Edges.............................................4 3 Graph types 9 3.1 Which graph class should I use?.....................................9 3.2 Basic graph types.............................................9 4 Algorithms 127 4.1 Approximation.............................................. 127 4.2 Assortativity............................................... 132 4.3 Bipartite................................................. 141 4.4 Blockmodeling.............................................. 161 4.5 Boundary................................................. 162 4.6 Centrality................................................. 163 4.7 Chordal.................................................. 184 4.8 Clique.................................................. 187 4.9 Clustering................................................ 190 4.10 Communities............................................... 193 4.11 Components............................................... 194 4.12 Connectivity.............................................. -
K-Path Centrality: a New Centrality Measure in Social Networks
Centrality Metrics in Social Network Analysis K-path: A New Centrality Metric Experiments Summary K-Path Centrality: A New Centrality Measure in Social Networks Adriana Iamnitchi University of South Florida joint work with Tharaka Alahakoon, Rahul Tripathi, Nicolas Kourtellis and Ramanuja Simha Adriana Iamnitchi K-Path Centrality: A New Centrality Measure in Social Networks 1 of 23 Centrality Metrics in Social Network Analysis Centrality Metrics Overview K-path: A New Centrality Metric Betweenness Centrality Experiments Applications Summary Computing Betweenness Centrality Centrality Metrics in Social Network Analysis Betweenness Centrality - how much a node controls the flow between any other two nodes Closeness Centrality - the extent a node is near all other nodes Degree Centrality - the number of ties to other nodes Eigenvector Centrality - the relative importance of a node Adriana Iamnitchi K-Path Centrality: A New Centrality Measure in Social Networks 2 of 23 Centrality Metrics in Social Network Analysis Centrality Metrics Overview K-path: A New Centrality Metric Betweenness Centrality Experiments Applications Summary Computing Betweenness Centrality Betweenness Centrality measures the extent to which a node lies on the shortest path between two other nodes betweennes CB (v) of a vertex v is the summation over all pairs of nodes of the fractional shortest paths going through v. Definition (Betweenness Centrality) For every vertex v 2 V of a weighted graph G(V ; E), the betweenness centrality CB (v) of v is defined by X X σst (v) CB