A Universal Placement Technique of Compressed Instructions For
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Modification of Adaptive Huffman Coding for Use in Encoding Large Alphabets
ITM Web of Conferences 15, 01004 (2017) DOI: 10.1051/itmconf/20171501004 CMES’17 Modification of Adaptive Huffman Coding for use in encoding large alphabets Mikhail Tokovarov1,* 1Lublin University of Technology, Electrical Engineering and Computer Science Faculty, Institute of Computer Science, Nadbystrzycka 36B, 20-618 Lublin, Poland Abstract. The paper presents the modification of Adaptive Huffman Coding method – lossless data compression technique used in data transmission. The modification was related to the process of adding a new character to the coding tree, namely, the author proposes to introduce two special nodes instead of single NYT (not yet transmitted) node as in the classic method. One of the nodes is responsible for indicating the place in the tree a new node is attached to. The other node is used for sending the signal indicating the appearance of a character which is not presented in the tree. The modified method was compared with existing methods of coding in terms of overall data compression ratio and performance. The proposed method may be used for large alphabets i.e. for encoding the whole words instead of separate characters, when new elements are added to the tree comparatively frequently. Huffman coding is frequently chosen for implementing open source projects [3]. The present paper contains the 1 Introduction description of the modification that may help to improve Efficiency and speed – the two issues that the current the algorithm of adaptive Huffman coding in terms of world of technology is centred at. Information data savings. technology (IT) is no exception in this matter. Such an area of IT as social media has become extremely popular 2 Study of related works and widely used, so that high transmission speed has gained a great importance. -

Real-Time Video Compression Techniques and Algorithms
Page i Real-Time Video Compression Page ii THE KLUWER INTERNATIONAL SERIES IN ENGINEERING AND COMPUTER SCIENCE MULTIMEDIA SYSTEMS AND APPLICATIONS Consulting Editor Borko Furht Florida Atlantic University Recently Published Titles: VIDEO AND IMAGE PROCESSING IN MULTIMEDIA SYSTEMS, by Borko Furht, Stephen W. Smoliar, HongJiang Zhang ISBN: 0-7923-9604-9 MULTIMEDIA SYSTEMS AND TECHNIQUES, edited by Borko Furht ISBN: 0-7923-9683-9 MULTIMEDIA TOOLS AND APPLICATIONS, edited by Borko Furht ISBN: 0-7923-9721-5 MULTIMEDIA DATABASE MANAGEMENT SYSTEMS, by B. Prabhakaran ISBN: 0-7923-9784-3 Page iii Real-Time Video Compression Techniques and Algorithms by Raymond Westwater Borko Furht Florida Atlantic University Page iv Distributors for North America: Kluwer Academic Publishers 101 Philip Drive Assinippi Park Norwell, Massachusetts 02061 USA Distributors for all other countries: Kluwer Academic Publishers Group Distribution Centre Post Office Box 322 3300 AH Dordrecht, THE NETHERLANDS Library of Congress Cataloging-in-Publication Data A C.I.P. Catalogue record for this book is available from the Library of Congress. Copyright © 1997 by Kluwer Academic Publishers All rights reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, mechanical, photocopying, recording, or otherwise, without the prior written permission of the publisher, Kluwer Academic Publishers, 101 Philip Drive, Assinippi Park, Norwell, Massachusetts 02061 Printed on acid-free paper. Printed in the United States of America Page v Contents Preface vii 1. The Problem of Video Compression 1 1.1 Overview of Video Compression Techniques 3 1.2 Applications of Compressed Video 6 1.3 Image and Video Formats 8 1.4 Overview of the Book 12 2. -

Region-Of-Interest-Based Video Coding for Video Conference Applications Marwa Meddeb
Region-of-interest-based video coding for video conference applications Marwa Meddeb To cite this version: Marwa Meddeb. Region-of-interest-based video coding for video conference applications. Signal and Image processing. Telecom ParisTech, 2016. English. tel-01410517 HAL Id: tel-01410517 https://hal-imt.archives-ouvertes.fr/tel-01410517 Submitted on 6 Dec 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. EDITE – ED 130 Doctorat ParisTech THÈSE pour obtenir le grade de docteur délivré par Télécom ParisTech Spécialité « Signal et Images » présentée et soutenue publiquement par Marwa MEDDEB le 15 Février 2016 Codage vidéo par régions d’intérêt pour des applications de visioconférence Region-of-interest-based video coding for video conference applications Directeurs de thèse : Béatrice Pesquet-Popescu (Télécom ParisTech) Marco Cagnazzo (Télécom ParisTech) Jury M. Marc ANTONINI , Directeur de Recherche, Laboratoire I3S Sophia-Antipolis Rapporteur M. François Xavier COUDOUX , Professeur, IEMN DOAE Valenciennes Rapporteur M. Benoit MACQ , Professeur, Université Catholique de Louvain Président Mme. Béatrice PESQUET-POPESCU , Professeur, Télécom ParisTech Directeur de thèse M. Marco CAGNAZZO , Maître de Conférence HdR, Télécom ParisTech Directeur de thèse M. Joël JUNG , Ingénieur de Recherche, Orange Labs Examinateur M. -

Implementation of Modified Huffman Coding in Wireless Sensor Networks
International Journal of Computer Applications (0975 – 8887) Volume 177 – No.1, November 2017 Implementation of Modified Huffman Coding in Wireless Sensor Networks M. Malleswari B. Ananda Krishna N. Madhuri M. Kalpana Chowdary B.Tech. IV year Professor, ECE, Assistant Professor Assistant Professor Department of ECE Chalapathi Institute of Department of ECE Department of ECE Chalapathi Institute of Engineering & Chalapathi Institute of Chalapathi Institute of Engineering & Technology, Guntur, AP, Engineering & Engineering & Technology, Guntur, AP, India Technology, Guntur, AP Technology, Guntur, AP, India India India ABSTRACT power efficient, different solutions have been proposed by WSNs are composed of many autonomous devices using many authors and some of them are listed below. sensors that are capable of interacting, processing information, and communicating wirelessly with their Data compression & decompression algorithms. neighbors. Though there are many constraints in design of Minimization of control packets by reducing link WSNs, the main limitation is the energy consumption. For failures, results low power consumption. most applications, the WSN is inaccessible or it is unfeasible Specially designed power control techniques to replace the batteries of the sensor nodes makes the network By modifying encryption & decryption algorithms power inefficient. Because of this, the lifetime of the network which has maximum operational time is also reduces. To Among many techniques/proposals, the authors make the network power efficient, different power Ruxanayasmin, et al, proposed LZW compression technique saving/reduction algorithms are proposed by different authors. to minimize the power consumption [1]. Lempel-Ziv-Welch Some of the authors have achieved the low power (LZW) compression algorithm is fast, simple to apply and consumption by modifying like encryption & decryption works best for files containing lots of repetitive data. -

Lossy and Lossless Image Compression Techniques for Technical Drawings
International Journal For Technological Research In Engineering Volume 2, Issue 5, January-2015 ISSN (Online): 2347 - 4718 LOSSY AND LOSSLESS IMAGE COMPRESSION TECHNIQUES FOR TECHNICAL DRAWINGS Deepa Mittal1, Prof. Manoj Mittal2, Prof. Dr. P. K. Jamwal3 1Research Scholar, Computer Engineering Pacific Academy of Higher Education and Research University Udaipur, Udaipur, India 2Asst. Prof. Mechanical Engineering Department, Govt. Engg. College Jhalawar, Jhalawar, India 3Professor, Mechanical Engineering Dept. Rajasthan Technical University Kota, Kota, India Abstract: Image compression is the process of reducing the can be compressed without the introduction of errors, but amount of data required to represent digital image with no only up to a certain extent. This is called significant loss of information. We need compression for lossless compression. Beyond this point, errors are data storage & transmission in DVD’s, remote sensing, introduced. In text, drawings and program files, it is crucial video conferencing & fax. The objective of image that compression be lossless because a single error can compression is to reduce irrelevance and redundancy of the seriously damage the meaning of a text file, or cause a image data in order to be able to store or transmit data in program not to run or damage in a mechanical product. In an efficient form. Image compression may be lossy or image compression, a small loss in quality is usually not lossless. Lossless compression is preferred for archival noticeable. There is no "critical point" up to which purpose & often used for medical imaging, technical compression works perfectly, but beyond which it becomes drawings, clipart or comics. Lossy compression methods impossible. -
Data Compression Method and System
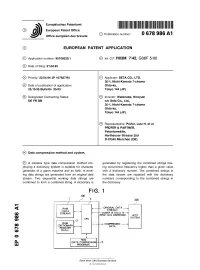
Europaisches Patentamt J European Patent Office © Publication number: 0 678 986 A1 Office europeen des brevets EUROPEAN PATENT APPLICATION © Application number: 95106020.1 int. ci.<>: H03M 7/42, G06F 5/00 @ Date of filing: 21.04.95 © Priority: 22.04.94 JP 107837/94 © Applicant: SETA CO., LTD. 35-1, Nishi-Kamata 7-chome @ Date of publication of application: Ohta-ku, 25.10.95 Bulletin 95/43 Tokyo 144 (JP) © Designated Contracting States: @ Inventor: Watanabe, Hiroyuki DE FR GB c/o Seta Co., Ltd., 35-1, Nishi-Kamata 7-chome Ohta-ku, Tokyo 144 (JP) © Representative: Prufer, Lutz H. et al PRUFER & PARTNER, Patentanwalte, Harthauser Strasse 25d D-81545 Munchen (DE) © Data compression method and system. © A lossless type data compression method em- generated by registering the combined strings hav- ploying a dictionary system is suitable for character ing occurrence frequency higher than a given value generator of a game machine and so forth. A work- with a dictionary number. The combined strings in ing data strings are generated from an original data the data stream are replaced with the dictionary stream. Two sequential working data strings are numbers corresponding to the combined strings in combined to form a combined string. A dictionary is the dictionary. FIG. 1 100 RAM _ (ORIGINAL DATA (DATA STREAM) — (NUMBER OF CYCLES TO — CO STREAM) REPEAT DATA 00 COMPRESSION) Oi , CPU RAM COMPRESSED 00 (DICTIONARY DATA REGISTER " CO DATA) ROM (DATA COMPRESSION PROGRAM) Rank Xerox (UK) Business Services (3. 10/3.09/3.3.4) 1 EP 0 678 986 A1 2 The present invention relates generally to a is next age coding system in the facsimile. -

Lossless Geometry Compression for Floating-Point Data in Steady-State and Time-Varying Fields Over Irregular Grids
IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, VOL. 0, NO. 0, MONTH YEAR 1 Lossless Geometry Compression for Floating-Point Data in Steady-State and Time-Varying Fields over Irregular Grids Dan Chen, Yi-Jen Chiang, Member, IEEE, Nasir Memon, Member, IEEE, and Xiaolin Wu, Member, IEEE (Revised May 2007) Abstract— In this paper we investigate the problem of lossless with no scalar values, where each coordinate is initially quantized geometry compression of irregular-grid volume data represented to 16 bits, i.e., 48 bits/vertex (b/v) before compression), and as a tetrahedral mesh. We propose a novel lossless compression we do not know of any reported results on compressing time- technique that effectively predicts, models, and encodes geometry varying fields over irregular grids (see Section 2). Given that the data for both steady-state (i.e., with only a single time step) and time-varying datasets. Our geometry coder applies to floating- number of tetrahedra in a tetrahedral mesh is typically about 4.5 point data without requiring an initial quantization step and is times the number of vertices and that connectivity compression truly lossless. However, the technique works equally well even results in about 2 bits per tetrahedron, it is clear that geometry if quantization is performed. Moreover, it does not need any compression is the bottleneck in the overall graphics compression. connectivity information, and can be easily integrated with a The situation gets worse for time-varying datasets where each class of the best existing connectivity compression techniques for vertex can have hundreds or even thousands of time-step scalar tetrahedral meshes with a small amount of overhead information. -
Entropy Coding – Run Length Codes
Entropy Achieving Codes Univ.Prof. Dr.-Ing. Markus Rupp LVA 389.141 Fachvertiefung Telekommunikation (LVA: 389.137 Image and Video Compression) Last change: Jan. 20, 2020 Resume • Lossless coding example • Consider the following source in which two bits each occur with equal probability. A redundancy is included by a parity check bit Input output 00 000 01 011 10 101 11 110 Univ.-Prof. Dr.-Ing. Markus Rupp 2 Resume • How large is the entropy of this source? K −1 K −1 H (U ) = − P(ak )log 2 (P(ak )) = − pk log 2 (pk ) k =0 k =0 1 1 = −4 log 2 = 2bit 4 4 • Let us assume we receive only the first and third bit, thus 2bit per symbol. • It thus must be possible to recompute the original signal. How? Univ.-Prof. Dr.-Ing. Markus Rupp 3 Resume • Solution Input output 0X0 000 0X1 011 1X1 101 1X0 110 b2 = b1 XOR b3 Univ.-Prof. Dr.-Ing. Markus Rupp 4 Resume • Consider a pdf fX(x) of a discrete memoryless source. • Q: What happens with the entropy if a constant is added? →fX(x+c) – A: nothing the entropy remains unchanged • Q: What happens with the entropy if the range is doubled? x→2x – A: nothing, the entropy remains unchanged Univ.-Prof. Dr.-Ing. Markus Rupp 5 Resume • Consider a pdf fX(x) of a continuous memoryless source. • Q: What happens with the entropy if a constant is added? →fX(x+c) – A: nothing the entropy remains unchanged • Q: What happens with the entropy if the range is doubled? x→2x → 2 fX(2x) – A: a lot Univ.-Prof. -

Frequency Domain SAR Data Compressor
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by NLR Reports Repository UNCLASSIFIED Nationaal Lucht- en Ruimtevaartlaboratorium National Aerospace Laboratory NLR Executive summary Frequency Domain SAR Data Compressor Problem area and that meets the image quality Report no. Advanced multi-mode SAR and data rate requirements. NLR-TP-2008-393 instruments such as the main instrument of the Sentinel-1 Earth Results and conclusions Author(s) Observation satellite require high- For the compression of raw data T. Algra performance on-board data from multi-mode SAR instruments, G.J. Vollmuller compression. Conventional Entropy Constrained Block Report classification solutions can not meet these Adaptive Quantization is an UNCLASSIFIED requirements. This calls for new attractive option. In particular, in a approaches using advanced space- frequency-domain configuration, Date qualified ASIC devices. the average compression ratio is July 2008 significantly higher than with Description of work conventional systems. The Knowledge area(s) In this paper a novel approach to the implementation on-board of Space on-board compression of raw SAR satellites is feasible due to the Methods for Development and data is presented. The so-called availability of the PowerFFT, a very Qualification of Avionics Entropy-Constrained Block fast FFT-oriented DSP ASIC, which Adaptive Quantization (ECBAQ) is currently being space-qualified. Descriptor(s) Satellite algorithm is applied in the SAR frequency domain. Using optimized Applicability Data Compression two-dimensional bit allocation with The presented compression method ASIC a carefully designed rate control is an attractive compression method loop in combination with efficient for application on all future SAR entropy coding, a design has been satellites. -

Digital Signal Compression
Digital Signal Compression With clear and easy-to-understand explanations, this book covers the fundamental con- cepts and coding methods of signal compression, while still retaining technical depth and rigor. It contains a wealth of illustrations, step-by-step descriptions of algorithms, examples, and practice problems, which make it an ideal textbook for senior under- graduate and graduate students, as well as a useful self-study tool for researchers and professionals. Principles of lossless compression are covered, as are various entropy coding tech- niques, including Huffman coding, arithmetic coding, run-length coding, and Lempel– Ziv coding. Scalar and vector quantization, and their use in various lossy compression systems, are thoroughly explained, and a full chapter is devoted to mathematical trans- formations, including the Karhunen–Loeve transform, discrete cosine transform (DCT), and wavelet transforms. Rate control is covered in detail, with several supporting algorithms to show how to achieve it. State-of-the-art transform and subband/wavelet image and video coding systems are explained, including JPEG2000, SPIHT, SBHP, EZBC, and H.264/AVC. Also, unique to this book is a chapter on set partition coding that sheds new light on SPIHT, SPECK, EZW, and related methods. William A. Pearlman is a Professor Emeritus in the Electrical, Computer, and Systems Engineering Department at the Rensselear Polytechnic Institute (RPI), where he has been a faculty member since 1979. He has more than 35 years of experience in teaching and researching in the fields of information theory, data compression, digital signal processing, and digital communications theory, and he has written about 250 published works in these fields. -
Proceedings, ITC/USA
International Telemetering Conference Proceedings, Volume 27 (1991) Item Type text; Proceedings Publisher International Foundation for Telemetering Journal International Telemetering Conference Proceedings Rights Copyright © International Foundation for Telemetering Download date 11/10/2021 07:54:42 Link to Item http://hdl.handle.net/10150/582038 ITC/USA/'91 INTERNATIONAL TELEMETERING CONFERENCE NOVEMBER 4-7, 1991 SPONSORED BY INTERNATIONAL FOUNDATION FOR TELEMETERING CO-TECHNICAL SPONSOR INSTRUMENT SOCIETY OF AMERICA Riviera Hotel and Convention Center Las Vegas, Nevada VOLUME XXVII 1991 1991 INTERNATIONAL TELEMETERING CONFERENCE COMMITTEE Judith Peach, General Chairwoman James Wise, Vice-General Chairman Clifford Aggen, Technical Program Chairman Vickie Reynolds, Vice-Technical Chairwoman Kathleen Reynolds, Executive Assistant Local Arrangements: Robert Beasley Gary Giel Roger Hesse Exhibits: Art Sullivan, Chairman Wiley Dunn, East Coast William Grahame, West Coast Kurt Kurisu, New Exhibitors Carol Albini, Administrator Government Affairs: Linda Malone Dave Kratz Registration: Norman Lantz, Chairman Carolyn Lytle Ron Bentley Richard Lytle, Finance Mel Wilks, Advertising Publicity: Warren Price Russ Smith Luceen Sullivan, Spouses Program Golf: Dick Fuller Jake Fuller Jim Horvath, Photographer INTERNATIONAL FOUNDATION FOR TELEMETERING BOARD OF DIRECTORS James A. Means, President Warren A. Price, First Vice President Norman F. Lantz, Second Vice President D. Ray Andelin, Treasurer John C. Hales, Assistant Secretary / Treasurer Ron D. Bentley, Director John V. Bolino, Director Charles L. Buchheit, Director Charles T. Force, Director Alain Hackstaff, Director Victor W. Hammond, Director Tom J. Hoban, Director Joseph G. Hoeg, Director Lawrence R. Shelley, Director J. Daniel Stewart, Director James A. Wise, Director Hugh F. Pruss, Director Emeritus A MESSAGE FROM THE 1991 TECHNICAL PROGRAM CHAIRMAN CLIFFORD F. -

Ninth Annual Conference
Proceedings of the 9th Winona Computer Science th UndePrgrarocdueeadite nRgesse aorcf ht hSeymp 8 os ium Winona Compu ter Science April 22, 2009 Undergraduate Research Symposium April 30, 2008 Winona, MN th Proceeding s of the 8 Winona Computer Science http://cs.winona.edu/CSConference Undergraduate Research Symposium April 30, 2008 Winona, MN http://cs.winona.edu/CSConference Sponsored by the Departments of Computer Science at Sponsored by the Departments of Computer Science at Symposium Schedule Student Activity Center, Kryzsko Commons April 22, 2009 Session I Title Presenter Page Including Children in Participatory Design of a User Interface: 2:00-2:20 Andrew Lien 14 Feedback and Analysis 2:20-2:40 Porting the Lung Cancer Survivability Prediction Tool to the iPhone Nan Meng 19 Comparison of Fuzzy C-Means Algorithms using Correlation 2:40-3:00 Wei Zhang 41 Metrics versus Euclidean Distance Metrics 3:00-3:20 AutoCompose: Music Generating Kernel Hudaynazar Geldiyev 9 3:20-3:40 A Classroom Testing Solution for Laptop Universities Matthew Schaub 29 Session II Title Presenter Page 6:00-6:20 Efficient Splitting of Instructions for Code Compression MM Bari 1 6:20-6:40 Usability Study of Web Forms on a Mobile Device Thomas Caflisch 6 Prediction of Home Automation Sensor State Utilizing Fourier 6:40-7:00 Andrew Popp 24 Synthesis 7:00-7:20 A Behavior Driven Intelligent Home Automation System Danish Shrestha 34 Efficient Splitting of Instructions for Code Compression MM Bari Department of Computer Science Winona State University Winona, MN 55987 [email protected] ABSTRACT metric for a good code compression algorithm it the Use of embedded devices like smart phones, GPS navigation compression ratio, shown in the following equation: systems, pdf readers, mp3 players and others is vast and their Compressed code size + Decoding table size demand is rising rapidly.