Display Interfaces - Fundamentals and Standards
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
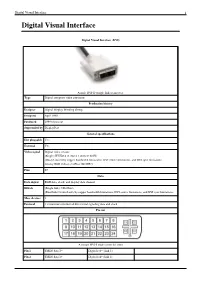
Digital Visual Interface (DVI)
Digital Visual Interface 1 Digital Visual Interface Digital Visual Interface (DVI) A male DVI-D (single link) connector. Type Digital computer video connector Production history Designer Digital Display Working Group Designed April 1999 Produced 1999 to present Superseded by DisplayPort General specifications Hot pluggable Yes External Yes Video signal Digital video stream: (Single) WUXGA (1,920 × 1,200) @ 60 Hz (Dual) Limited by copper bandwidth limitations, DVI source limitations, and DVI sync limitations. Analog RGB video (−3 dB at 400 MHz) Pins 29 Data Data signal RGB data, clock, and display data channel Bitrate (Single link) 3.96 Gbit/s (Dual link) Limited only by copper bandwidth limitations, DVI source limitations, and DVI sync limitations. Max. devices 1 Protocol 3 × transition minimized differential signaling data and clock Pin out A female DVI-I socket from the front Pin 1 TMDS data 2− Digital red− (link 1) Pin 2 TMDS data 2+ Digital red+ (link 1) Digital Visual Interface 2 Pin 3 TMDS data 2/4 shield Pin 4 TMDS data 4− Digital green− (link 2) Pin 5 TMDS data 4+ Digital green+ (link 2) Pin 6 DDC clock Pin 7 DDC data Pin 8 Analog vertical sync Pin 9 TMDS data 1− Digital green− (link 1) Pin 10 TMDS data 1+ Digital green+ (link 1) Pin 11 TMDS data 1/3 shield Pin 12 TMDS data 3- Digital blue− (link 2) Pin 13 TMDS data 3+ Digital blue+ (link 2) Pin 14 +5 V Power for monitor when in standby Pin 15 Ground Return for pin 14 and analog sync Pin 16 Hot plug detect Pin 17 TMDS data 0− Digital blue− (link 1) and digital sync Pin 18 TMDS data 0+ Digital blue+ (link 1) and digital sync Pin 19 TMDS data 0/5 shield Pin 20 TMDS data 5− Digital red− (link 2) Pin 21 TMDS data 5+ Digital red+ (link 2) Pin 22 TMDS clock shield Pin 23 TMDS clock+ Digital clock+ (links 1 and 2) Pin 24 TMDS clock− Digital clock− (links 1 and 2) C1 Analog red C2 Analog green C3 Analog blue C4 Analog horizontal sync C5 Analog ground Return for R, G, and B signals Digital Visual Interface (DVI) is a video display interface developed by the Digital Display Working Group (DDWG). -

Dell P2319H User's Guide
Dell P2219H/P2319H/P2419H/P2719H User’s Guide Model: P2219H/P2319H/P2419H/P2719H Regulatory model: P2219Hb/P2319Ht/P2319Hc/P2419Hb/P2419Hc/P2719Ht NOTE: A NOTE indicates important information that helps you make better use of your computer. CAUTION: A CAUTION indicates potential damage to hardware or loss of data if instructions are not followed. WARNING: A WARNING indicates a potential for property damage, personal injury, or death. Copyright © 2018 Dell Inc. or its subsidiaries. All rights reserved. Dell, EMC, and other trademarks are trademarks of Dell Inc. or its subsidiaries. Other trademarks may be trademarks of their respective owners. 2018 - 06 Rev. A00 Contents About your monitor . 6 Package contents. 6 Product features . 8 Identifying parts and controls . 9 Front view . 9 Back view . .10 Side view. 11 Bottom view . 12 Monitor specifications . 13 Resolution specifications . .16 Supported video modes . .16 Preset display modes . .16 Electrical specifications . 17 Physical characteristics . 17 Environmental characteristics . 20 Power management modes. 21 Pin assignments . 24 Plug and play capability . 27 Universal Serial Bus (USB) interface . 27 USB 3.0 . .27 USB 2.0 . .27 USB 3.0 upstream connector . 28 USB 3.0 downstream connector . 28 USB 2.0 downstream connector . 29 USB ports . 29 LCD monitor quality and pixel policy . 29 Maintenance guidelines . 30 │3 Cleaning your monitor . 30 Setting up the monitor . 31 Attaching the stand . 31 Connecting your monitor . 33 Connecting the DisplayPort (DisplayPort to DisplayPort) cable. 33 Connecting the VGA cable (optional) . 33 Connecting the HDMI cable (optional) . 34 Connecting the USB 3.0 cable. 34 Organizing your cables. 35 Removing the monitor stand . -

Dell P2314H User's Guide
User’s Guide Dell P2314H Model No.: P2314H Regulatory model: P2314Ht NOTE: A NOTE indicates important information that helps you make better use of your computer. Contents CAUTION: A CAUTION indicates potential damage to hardware or loss About Your Monitor..........................................................................6 of data if instructions are not followed. Package Contents...........................................................................................6 WARNING: A WARNING indicates a potential for property damage, Product Features.............................................................................................8 personal injury, or death. Identifying Parts and Controls.....................................................................9 Front View.............................................................................................................9 Back View.............................................................................................................10 Side View..............................................................................................................11 Bottom View........................................................................................................11 Monitor Specifications..................................................................................12 Flat-Panel Specifications..................................................................................12 Resolution Specifications.................................................................................13 -

Dell U3014 Flat Panel Monitor User's Guide
Dell™ U3014 Flat Panel Monitor User Guide Setting the display resolution to 2560 x 1600 (maximum) Information in this document is subject to change without notice. © 2012-2013 Dell Inc. All rights reserved. Reproduction of these materials in any manner whatsoever without the written permission of Dell Inc. is strictly forbidden. Trademarks used in this text: Dell and the DELL logo are trademarks of Dell Inc; Microsoft and Windows are either trademarks or registered trademarks of Microsoft Corporation in the United States and/or other countries, Intel is a registered trademark of Intel Corporation in the U.S. and other countries; and ATI is a trademark of Advanced Micro Devices, Inc. ENERGY STAR is a registered trademark of the U.S. Environmental Protection Agency. As an ENERGY STAR partner, Dell Inc. has determined that this product meets the ENERGY STAR guidelines for energy efficiency. Other trademarks and trade names may be used in this document to refer to either the entities claiming the marks and names or their products. Dell Inc. disclaims any proprietary interest in trademarks and trade names other than its own. Model U3014t Qcnrck`cp 2013 Rev. A04 Dell™ U3014 Flat Panel Monitor User's Guide About Your Monitor Setting Up the Monitor Operating the Monitor Troubleshooting Appendix Notes, Cautions, and Warnings NOTE: A NOTE indicates important information that helps you make better use of your computer. CAUTION: A CAUTION indicates either potential damage to hardware or loss of data and tells you how to avoid the problem. WARNING: A WARNING indicates a potential for property damage, personal injury, or death. -

Dell U2711 Monitor User's Guide
Dell™ U2711 Flat Panel Monitor User's Guide About Your Monitor Setting Up the Monitor Operating the Monitor Solving Problems Appendix Notes, Cautions, and Warnings NOTE: A NOTE indicates important information that helps you make better use of your computer. CAUTION: A CAUTION indicates potential damage to hardware or loss of data if instructions are not followed. WARNING: A Warning indicates a potential for property damage, personal injury or death. Information in this document is subject to change without notice. © 2009–2010 Dell Inc. All rights reserved. Reproduction of these materials in any manner whatsoever without the written permission of Dell Inc. is strictly forbidden. Trademarks used in this text: Dell and the DELL logo are trademarks of Dell Inc; Microsoft and Windows are either trademarks or registered trademarks of Microsoft Corporation in the United States and/or other countries; Other trademarks and trade names may be used in this document to refer to either the entities claiming the marks and names or their products. Dell Inc. disclaims any proprietary interest in trademarks and trade names other than its own. Model U2711b April 2010 Rev. A01 Back to Contents Page About Your Monitor Dell™ U2711 Flat Panel Monitor User's Guide Package Contents Product Features Identifying Parts and Controls Monitor Specifications Universal Serial Bus (USB) Interface Card Reader Specifications Plug and Play Capability Maintenance Guidelines Package Contents Your monitor comes with all the items shown below. Ensure that you have all the items. If something is missing, contact Dell. NOTE: Some items may be optional and may not ship with your monitor. -

VGA, DVI, S-Video and Other Video Connectors Pinouts Diagrams @ Pinouts.Ru
05.12.15 15:43 VGA, DVI, S-Video and other video connectors pinouts diagrams @ pin... to russian VGA, DVI, S-Video and other video connectors pinouts Pinouts.ru › Videocards Connectors Search: A video card (also called a video adapter) is an expansion card which generates a feed of output images to a display. DFP-compliant MDR-20 Digital Flat Panel (DFP) Used on digital flat panel monitors. Standard by DFP Group. Protocol: PanelLink DisplayPort DisplayPort is a digital display interface. DMS-59 DMS-59 is a 59-pin electrical connector generally used for computer video cards. It provides two DVI/VGA outputs on a single connector. DVI (Digital Visual Interface) The Digital Visual Interface (DVI) is a video interface standard designed to maximize the visual quality of digital display devices such as flat panel LCD computer displays and digital projectors. Enhanced video connector (EVC) Defined by Video Electronic Standards Association (VESA) HDMI (High-Definition Multimedia Interface) interface connector The High-Definition Multi-media is an industry-supported digital audio/video interface. HDMI provides an interface between any compatible digital audio/video source and a compatible digital audio and/or video monitor. Mini DisplayPort The Mini DisplayPort (MiniDP or mDP) is a miniaturized version of the DisplayPort audio-visual digital interface. Mini DisplayPort is capable of driving display devices with resolutions up to 2560?1600. Mostly used in new Apple computers: MacBook, MacBook Pro, MacBook Air, iMac, Mac mini, Mac Pro, and Xserve, but also fits to some PC notebooks. Mini-DVI connector is used on Apple computers as a digital alternative to the Mini-VGA connector. -

Compromising Emanations: Eavesdropping Risks of Computer Displays
UCAM-CL-TR-577 Technical Report ISSN 1476-2986 Number 577 Computer Laboratory Compromising emanations: eavesdropping risks of computer displays Markus G. Kuhn December 2003 15 JJ Thomson Avenue Cambridge CB3 0FD United Kingdom phone +44 1223 763500 http://www.cl.cam.ac.uk/ c 2003 Markus G. Kuhn This technical report is based on a dissertation submitted June 2002 by the author for the degree of Doctor of Philosophy to the University of Cambridge, Wolfson College. Technical reports published by the University of Cambridge Computer Laboratory are freely available via the Internet: http://www.cl.cam.ac.uk/TechReports/ ISSN 1476-2986 Summary Electronic equipment can emit unintentional signals from which eavesdroppers may re- construct processed data at some distance. This has been a concern for military hardware for over half a century. The civilian computer-security community became aware of the risk through the work of van Eck in 1985. Military “Tempest” shielding test standards remain secret and no civilian equivalents are available at present. The topic is still largely neglected in security textbooks due to a lack of published experimental data. This report documents eavesdropping experiments on contemporary computer displays. It discusses the nature and properties of compromising emanations for both cathode-ray tube and liquid-crystal monitors. The detection equipment used matches the capabilities to be expected from well-funded professional eavesdroppers. All experiments were carried out in a normal unshielded office environment. They therefore focus on emanations from display refresh signals, where periodic averaging can be used to obtain reproducible results in spite of varying environmental noise. -

Dell P2219H/P2319H/P2419H/P2719H User’S Guide
Dell P2219H/P2319H/P2419H/P2719H User’s Guide Model: P2219H/P2319H/P2419H/P2719H Regulatory model: P2219Hb/P2319Ht/P2319Hc/P2419Hb/P2419Hc/P2719Ht NOTE: A NOTE indicates important information that helps you make better use of your computer. CAUTION: A CAUTION indicates potential damage to hardware or loss of data if instructions are not followed. WARNING: A WARNING indicates a potential for property damage, personal injury, or death. Copyright © 2018 Dell Inc. or its subsidiaries. All rights reserved. Dell, EMC, and other trademarks are trademarks of Dell Inc. or its subsidiaries. Other trademarks may be trademarks of their respective owners. 2018 - 06 Rev. A00 Contents About your monitor . 6 Package contents. 6 Product features . 8 Identifying parts and controls . 9 Front view . 9 Back view . .10 Side view. 11 Bottom view . 12 Monitor specifications . 13 Resolution specifications . .16 Supported video modes . .16 Preset display modes . .16 Electrical specifications . 17 Physical characteristics . 17 Environmental characteristics . 20 Power management modes. 21 Pin assignments . 24 Plug and play capability . 27 Universal Serial Bus (USB) interface . 27 USB 3.0 . .27 USB 2.0 . .27 USB 3.0 upstream connector . 28 USB 3.0 downstream connector . 28 USB 2.0 downstream connector . 29 USB ports . 29 LCD monitor quality and pixel policy . 29 Maintenance guidelines . 30 │3 Cleaning your monitor . 30 Setting up the monitor . 31 Attaching the stand . 31 Connecting your monitor . 33 Connecting the DisplayPort (DisplayPort to DisplayPort) cable. 33 Connecting the VGA cable (optional) . 33 Connecting the HDMI cable (optional) . 34 Connecting the USB 3.0 cable. 34 Organizing your cables. 35 Removing the monitor stand . -
Dell U2415 Monitor User's Guide
Dell U2415 User’s Guide Model: U2415 Regulatory model: U2415b Notes, Cautions, and Warnings NOTE: A NOTE indicates important information that helps you make better use of your computer. CAUTION: A CAUTION indicates potential damage to hardware or loss of data if instructions are not followed. WARNING: A WARNING indicates a potential for property damage, personal injury, or death. ____________________ Copyright © 2014 Dell Inc. All rights reserved. Trademarks used in this text: Dell and the DELL logo are trademarks of Dell Inc.; Microsoft and Windows are either trademarks or registered trademarks of Microsoft Corporation in the United States and/or other countries, Intel is a registered trademark of Intel Corporation in the U.S. and other countries; and ATI is a trademark of Advanced Micro Devices, Inc. ENERGY STAR is a registered trademark of the U.S. Environmental Protection Agency. As an ENERGY STAR partner, Dell Inc. has determined that this product meets the ENERGY STAR guidelines for energy efficiency. Other trademarks and trade names may be used in this document to refer to either the entities claiming the marks and names or their products. Dell Inc. disclaims any proprietary interest in trademarks and trade names other than its own. 2014 - 08 Rev. A00 Contents 1 About Your Monitor . .5 Package Contents . 5 Product Features . 7 Identifying Parts and Controls . 8 Monitor Specifications . 12 Plug and Play Capability . 21 Universal Serial Bus (USB) Interface . 22 LCD Monitor Quality and Pixel Policy. 23 Maintenance Guidelines . 24 2 Setting Up the Monitor . 25 Attaching the Stand. 25 Connecting Your Monitor . .26 Organizing Your Cables . -

Dell P2217H/P2317H/P2317HWH/ P2417H/P2717H Monitor User's
Dell P2217H/P2317H/P2317HWH/ P2417H/P2717H Monitor User’s Guide Model: P2217H/P2317H/P2317HWH/P2417H/P2717H Regulatory model: P2217Hb, P2217Hc, P2317Hb, P2317Hf, P2317Ht, P2317HWHb, P2417Hb, P2417Hc, P2717Ht Notes, cautions, and warnings NOTE: A NOTE indicates important information that helps you make better use of your computer. CAUTION: A CAUTION indicates potential damage to hardware or loss of data if instructions are not followed. WARNING: A WARNING indicates a potential for property damage, personal injury, or death. ____________________ Copyright © 2016-2019 Dell Inc. All rights reserved. This product is protected by U.S. and international copyright and intellectual property laws. Dell™ and the Dell logo are trademarks of Dell Inc. in the United States and/or other jurisdictions. All other marks and names mentioned herein may be trademarks of their respective companies. 2019 - 04 Rev. A06 Contents About Your Monitor . 5 Package Contents . .5 Product Features . .7 Identifying Parts and Controls . .8 Monitor Specifications . .12 Plug and Play Capability. 23 Universal Serial Bus (USB) Interface . 24 LCD Monitor Quality and Pixel Policy . 26 Maintenance Guidelines. 26 Setting Up the Monitor . 27 Attaching the Stand. 27 Connecting Your Monitor . 29 Organizing Your Cables . .31 Removing the Monitor Stand . .31 Wall Mounting (Optional) . 32 Operating the Monitor. 33 Power On the Monitor . 33 Using the Front-Panel Controls . 33 Using the On-Screen Display (OSD) Menu . 35 Contents | 3 Setting the Maximum Resolution . 50 Using the Tilt, Swivel, and Vertical Extension . .51 Rotating the Monitor. 52 Adjusting the Rotation Display Settings of Your System . 53 Troubleshooting . 54 Self-Test . 54 Built-in Diagnostics . -

HP Compaq Elite 8300 Business PC
QuickSpecs HP Compaq Elite 8300 Business PC Overview HP COMPAQ ELITE 8300 ULTRA-SLIM BUSINESS PC 1 Optical Disc Drive (optional) 2 Secure Digital (SD) Card Reader (optional) 3 Rear I/O includes (4) USB 3.0 ports, (2) USB 2.0 ports, (2) DisplayPort and (1) VGA video interfaces, PS/2 mouse and keyboard ports, RJ-45 network interface, 3.5mm audio in/out jacks 4 Front I/O includes (4) USB 2.0 ports, a headphone output and a microphone jack 5 2.5” internal data drive bay 6 135W 87% efficient external Power Adapter or 180W 87% efficient external Power Adapter (when configured with discrete graphics) 7 HP USDT Tower Stand (optional) 8 HP Mouse 9 HP Keyboard 10 HP Monitor (sold separately) DA - 14268 Worldwide — Version 41 — November 22, 2013 Page 1 QuickSpecs HP Compaq Elite 8300 Business PC Overview HP COMPAQ ELITE 8300 SMALL FORM FACTOR BUSINESS PC 1 Rear I/O includes (4) USB 3.0 ports, (2) USB 2.0 ports, serial port, PS/2 mouse and keyboard ports, RJ-45 network interface, DisplayPort and VGA video interfaces, and 3.5mm audio in/out jacks 2 Low profile expansion slots include (1) PCI, (1) PCI Express x1 and (2) PCI Express x16 graphics 3 Front I/O includes (4) USB 2.0 ports, a headphone output and a microphone jack 4 HP Mouse 5 HP Keyboard 6 3.5” external drive bay supporting a media card reader or a secondary data drive 7 5.25” external drive bay supporting an optical disk drive 8 3.5” internal drive bay supporting primary data drive 9 240W standard efficiency or 90% high efficiency Power Supply 10 HP Monitor (sold separately) DA - 14268 Worldwide -

LNCS 3424, Holds the Proceedings from PET 2004 in Toronto
Lecture Notes in Computer Science 3424 Commenced Publication in 1973 Founding and Former Series Editors: Gerhard Goos, Juris Hartmanis, and Jan van Leeuwen Editorial Board David Hutchison Lancaster University, UK Takeo Kanade Carnegie Mellon University, Pittsburgh, PA, USA Josef Kittler University of Surrey, Guildford, UK Jon M. Kleinberg Cornell University, Ithaca, NY, USA Friedemann Mattern ETH Zurich, Switzerland John C. Mitchell Stanford University, CA, USA Moni Naor Weizmann Institute of Science, Rehovot, Israel Oscar Nierstrasz University of Bern, Switzerland C. Pandu Rangan Indian Institute of Technology, Madras, India Bernhard Steffen University of Dortmund, Germany Madhu Sudan Massachusetts Institute of Technology, MA, USA Demetri Terzopoulos New York University, NY, USA Doug Tygar University of California, Berkeley, CA, USA Moshe Y. Vardi Rice University, Houston, TX, USA Gerhard Weikum Max-Planck Institute of Computer Science, Saarbruecken, Germany David Martin Andrei Serjantov (Eds.) Privacy Enhancing Technologies 4th International Workshop, PET 2004 Toronto, Canada, May 26-28, 2004 Revised Selected Papers 13 Volume Editors David Martin University of Massachusetts Lowell, Department of Computer Science One University Ave., Lowell, Massachusetts 01854, USA E-mail: [email protected] Andrei Serjantov University of Cambridge, Computer Laboratory William Gates Building, 15 JJ Thomson Avenue, Cambridge CB3 0FD, UK E-mail: [email protected] Library of Congress Control Number: 2005926701 CR Subject Classification (1998): E.3, C.2, D.4.6, K.6.5, K.4, H.3, H.4, I.7 ISSN 0302-9743 ISBN-10 3-540-26203-2 Springer Berlin Heidelberg New York ISBN-13 978-3-540-26203-9 Springer Berlin Heidelberg New York Springer-Verlag Berlin Heidelberg holds the exclusive right of distribution and reproduction of this work, for a period of three years starting from the date of publication.