4.1 Reduction Theory Let Q(X, Y)=Ax2 + Bxy + Cy2 Be a Binary Quadratic Form (A, B, C Z)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

MASTER COURSE: Quaternion Algebras and Quadratic Forms Towards Shimura Curves
MASTER COURSE: Quaternion algebras and Quadratic forms towards Shimura curves Prof. Montserrat Alsina Universitat Polit`ecnicade Catalunya - BarcelonaTech EPSEM Manresa September 2013 ii Contents 1 Introduction to quaternion algebras 1 1.1 Basics on quaternion algebras . 1 1.2 Main known results . 4 1.3 Reduced trace and norm . 6 1.4 Small ramified algebras... 10 1.5 Quaternion orders . 13 1.6 Special basis for orders in quaternion algebras . 16 1.7 More on Eichler orders . 18 1.8 Eichler orders in non-ramified and small ramified Q-algebras . 21 2 Introduction to Fuchsian groups 23 2.1 Linear fractional transformations . 23 2.2 Classification of homographies . 24 2.3 The non ramified case . 28 2.4 Groups of quaternion transformations . 29 3 Introduction to Shimura curves 31 3.1 Quaternion fuchsian groups . 31 3.2 The Shimura curves X(D; N) ......................... 33 4 Hyperbolic fundamental domains . 37 4.1 Groups of quaternion transformations and the Shimura curves X(D; N) . 37 4.2 Transformations, embeddings and forms . 40 4.2.1 Elliptic points of X(D; N)....................... 43 4.3 Local conditions at infinity . 48 iii iv CONTENTS 4.3.1 Principal homotheties of Γ(D; N) for D > 1 . 48 4.3.2 Construction of a fundamental domain at infinity . 49 4.4 Principal symmetries of Γ(D; N)........................ 52 4.5 Construction of fundamental domains (D > 1) . 54 4.5.1 General comments . 54 4.5.2 Fundamental domain for X(6; 1) . 55 4.5.3 Fundamental domain for X(10; 1) . 57 4.5.4 Fundamental domain for X(15; 1) . -

On the Linear Transformations of a Quadratic Form Into Itself*
ON THE LINEAR TRANSFORMATIONS OF A QUADRATIC FORM INTO ITSELF* BY PERCEY F. SMITH The problem of the determination f of all linear transformations possessing an invariant quadratic form, is well known to be classic. It enjoyed the atten- tion of Euler, Cayley and Hermite, and reached a certain stage of com- pleteness in the memoirs of Frobenius,| Voss,§ Lindemann|| and LoEWY.^f The investigations of Cayley and Hermite were confined to the general trans- formation, Erobenius then determined all proper transformations, and finally the problem was completely solved by Lindemann and Loewy, and simplified by Voss. The present paper attacks the problem from an altogether different point, the fundamental idea being that of building up any such transformation from simple elements. The primary transformation is taken to be central reflection in the quadratic locus defined by setting the given form equal to zero. This transformation is otherwise called in three dimensions, point-plane reflection,— point and plane being pole and polar plane with respect to the fundamental quadric. In this way, every linear transformation of the desired form is found to be a product of central reflections. The maximum number necessary for the most general case is the number of variables. Voss, in the first memoir cited, proved this theorem for the general transformation, assuming the latter given by the equations of Cayley. In the present paper, however, the theorem is derived synthetically, and from this the analytic form of the equations of trans- formation is deduced. * Presented to the Society December 29, 1903. Received for publication, July 2, 1P04. -

Quadratic Forms, Lattices, and Ideal Classes
Quadratic forms, lattices, and ideal classes Katherine E. Stange March 1, 2021 1 Introduction These notes are meant to be a self-contained, modern, simple and concise treat- ment of the very classical correspondence between quadratic forms and ideal classes. In my personal mental landscape, this correspondence is most naturally mediated by the study of complex lattices. I think taking this perspective breaks the equivalence between forms and ideal classes into discrete steps each of which is satisfyingly inevitable. These notes follow no particular treatment from the literature. But it may perhaps be more accurate to say that they follow all of them, because I am repeating a story so well-worn as to be pervasive in modern number theory, and nowdays absorbed osmotically. These notes require a familiarity with the basic number theory of quadratic fields, including the ring of integers, ideal class group, and discriminant. I leave out some details that can easily be verified by the reader. A much fuller treatment can be found in Cox's book Primes of the form x2 + ny2. 2 Moduli of lattices We introduce the upper half plane and show that, under the quotient by a natural SL(2; Z) action, it can be interpreted as the moduli space of complex lattices. The upper half plane is defined as the `upper' half of the complex plane, namely h = fx + iy : y > 0g ⊆ C: If τ 2 h, we interpret it as a complex lattice Λτ := Z+τZ ⊆ C. Two complex lattices Λ and Λ0 are said to be homothetic if one is obtained from the other by scaling by a complex number (geometrically, rotation and dilation). -

Solving Cubic Polynomials
Solving Cubic Polynomials 1.1 The general solution to the quadratic equation There are four steps to finding the zeroes of a quadratic polynomial. 1. First divide by the leading term, making the polynomial monic. a 2. Then, given x2 + a x + a , substitute x = y − 1 to obtain an equation without the linear term. 1 0 2 (This is the \depressed" equation.) 3. Solve then for y as a square root. (Remember to use both signs of the square root.) a 4. Once this is done, recover x using the fact that x = y − 1 . 2 For example, let's solve 2x2 + 7x − 15 = 0: First, we divide both sides by 2 to create an equation with leading term equal to one: 7 15 x2 + x − = 0: 2 2 a 7 Then replace x by x = y − 1 = y − to obtain: 2 4 169 y2 = 16 Solve for y: 13 13 y = or − 4 4 Then, solving back for x, we have 3 x = or − 5: 2 This method is equivalent to \completing the square" and is the steps taken in developing the much- memorized quadratic formula. For example, if the original equation is our \high school quadratic" ax2 + bx + c = 0 then the first step creates the equation b c x2 + x + = 0: a a b We then write x = y − and obtain, after simplifying, 2a b2 − 4ac y2 − = 0 4a2 so that p b2 − 4ac y = ± 2a and so p b b2 − 4ac x = − ± : 2a 2a 1 The solutions to this quadratic depend heavily on the value of b2 − 4ac. -

Classification of Quadratic Surfaces
Classification of Quadratic Surfaces Pauline Rüegg-Reymond June 14, 2012 Part I Classification of Quadratic Surfaces 1 Context We are studying the surface formed by unshearable inextensible helices at equilibrium with a given reference state. A helix on this surface is given by its strains u ∈ R3. The strains of the reference state helix are denoted by ˆu. The strain-energy density of a helix given by u is the quadratic function 1 W (u − ˆu) = (u − ˆu) · K (u − ˆu) (1) 2 where K ∈ R3×3 is assumed to be of the form K1 0 K13 K = 0 K2 K23 K13 K23 K3 with K1 6 K2. A helical rod also has stresses m ∈ R3 related to strains u through balance laws, which are equivalent to m = µ1u + µ2e3 (2) for some scalars µ1 and µ2 and e3 = (0, 0, 1), and constitutive relation m = K (u − ˆu) . (3) Every helix u at equilibrium, with reference state uˆ, is such that there is some scalars µ1, µ2 with µ1u + µ2e3 = K (u − ˆu) µ1u1 = K1 (u1 − uˆ1) + K13 (u3 − uˆ3) (4) ⇔ µ1u2 = K2 (u2 − uˆ2) + K23 (u3 − uˆ3) µ1u3 + µ2 = K13 (u1 − uˆ1) + K23 (u1 − uˆ1) + K3 (u3 − uˆ3) Assuming u1 and u2 are not zero at the same time, we can rewrite this surface (K2 − K1) u1u2 + K23u1u3 − K13u2u3 − (K2uˆ2 + K23uˆ3) u1 + (K1uˆ1 + K13uˆ3) u2 = 0. (5) 1 Since this is a quadratic surface, we will study further their properties. But before going to general cases, let us observe that the u3 axis is included in (5) for any values of ˆu and K components. -

Binary Quadratic Forms and the Ideal Class Group
Binary Quadratic Forms and the Ideal Class Group Seth Viren Neel August 6, 2012 1 Introduction We investigate the genus theory of Binary Quadratic Forms. Genus theory is a classification of all the ideals of quadratic fields k = Q(√m). Gauss showed that if we define an equivalence relation on the fractional ideals of a number field k via the principal ideals of k,anddenotethesetofequivalenceclassesbyH+(k)thatthis is a finite abelian group under multiplication of ideals called the ideal class group. The connection with knot theory is that this is analogous to the classification of the homology classes of the homology group by linking numbers. We develop the genus theory from the more classical standpoint of quadratic forms. After introducing the basic definitions and equivalence relations between binary quadratic forms, we introduce Lagrange’s theory of reduced forms, and then the classification of forms into genus. Along the way we give an alternative proof of the descent step of Fermat’s theorem on primes that are the sum of two squares, and solutions to the related problems of which primes can be written as x2 + ny2 for several values of n. Finally we connect the ideal class group with the group of equivalence classes of binary quadratic forms, under a suitable composition law. For d<0, the ideal class 1 2 BINARY QUADRATIC FORMS group of Q(√d)isisomorphictotheclassgroupofintegralbinaryquadraticforms of discriminant d. 2 Binary Quadratic Forms 2.1 Definitions and Discriminant An integral quadratic form in 2 variables, is a function f(x, y)=ax2 + bxy + cy2, where a, b, c Z.Aquadraticformissaidtobeprimitive if a, b, c are relatively ∈ prime. -

QUADRATIC FORMS and DEFINITE MATRICES 1.1. Definition of A
QUADRATIC FORMS AND DEFINITE MATRICES 1. DEFINITION AND CLASSIFICATION OF QUADRATIC FORMS 1.1. Definition of a quadratic form. Let A denote an n x n symmetric matrix with real entries and let x denote an n x 1 column vector. Then Q = x’Ax is said to be a quadratic form. Note that a11 ··· a1n . x1 Q = x´Ax =(x1...xn) . xn an1 ··· ann P a1ixi . =(x1,x2, ··· ,xn) . P anixi 2 (1) = a11x1 + a12x1x2 + ... + a1nx1xn 2 + a21x2x1 + a22x2 + ... + a2nx2xn + ... + ... + ... 2 + an1xnx1 + an2xnx2 + ... + annxn = Pi ≤ j aij xi xj For example, consider the matrix 12 A = 21 and the vector x. Q is given by 0 12x1 Q = x Ax =[x1 x2] 21 x2 x1 =[x1 +2x2 2 x1 + x2 ] x2 2 2 = x1 +2x1 x2 +2x1 x2 + x2 2 2 = x1 +4x1 x2 + x2 1.2. Classification of the quadratic form Q = x0Ax: A quadratic form is said to be: a: negative definite: Q<0 when x =06 b: negative semidefinite: Q ≤ 0 for all x and Q =0for some x =06 c: positive definite: Q>0 when x =06 d: positive semidefinite: Q ≥ 0 for all x and Q = 0 for some x =06 e: indefinite: Q>0 for some x and Q<0 for some other x Date: September 14, 2004. 1 2 QUADRATIC FORMS AND DEFINITE MATRICES Consider as an example the 3x3 diagonal matrix D below and a general 3 element vector x. 100 D = 020 004 The general quadratic form is given by 100 x1 0 Q = x Ax =[x1 x2 x3] 020 x2 004 x3 x1 =[x 2 x 4 x ] x2 1 2 3 x3 2 2 2 = x1 +2x2 +4x3 Note that for any real vector x =06 , that Q will be positive, because the square of any number is positive, the coefficients of the squared terms are positive and the sum of positive numbers is always positive. -

Elements of Chapter 9: Nonlinear Systems Examples
Elements of Chapter 9: Nonlinear Systems To solve x0 = Ax, we use the ansatz that x(t) = eλtv. We found that λ is an eigenvalue of A, and v an associated eigenvector. We can also summarize the geometric behavior of the solutions by looking at a plot- However, there is an easier way to classify the stability of the origin (as an equilibrium), To find the eigenvalues, we compute the characteristic equation: p Tr(A) ± ∆ λ2 − Tr(A)λ + det(A) = 0 λ = 2 which depends on the discriminant ∆: • ∆ > 0: Real λ1; λ2. • ∆ < 0: Complex λ = a + ib • ∆ = 0: One eigenvalue. The type of solution depends on ∆, and in particular, where ∆ = 0: ∆ = 0 ) 0 = (Tr(A))2 − 4det(A) This is a parabola in the (Tr(A); det(A)) coordinate system, inside the parabola is where ∆ < 0 (complex roots), and outside the parabola is where ∆ > 0. We can then locate the position of our particular trace and determinant using the Poincar´eDiagram and it will tell us what the stability will be. Examples Given the system where x0 = Ax for each matrix A below, classify the origin using the Poincar´eDiagram: 1 −4 1. 4 −7 SOLUTION: Compute the trace, determinant and discriminant: Tr(A) = −6 Det(A) = −7 + 16 = 9 ∆ = 36 − 4 · 9 = 0 Therefore, we have a \degenerate sink" at the origin. 1 2 2. −5 −1 SOLUTION: Compute the trace, determinant and discriminant: Tr(A) = 0 Det(A) = −1 + 10 = 9 ∆ = 02 − 4 · 9 = −36 The origin is a center. 1 3. Given the system x0 = Ax where the matrix A depends on α, describe how the equilibrium solution changes depending on α (use the Poincar´e Diagram): 2 −5 (a) α −2 SOLUTION: The trace is 0, so that puts us on the \det(A)" axis. -

Quadratic Form - Wikipedia, the Free Encyclopedia
Quadratic form - Wikipedia, the free encyclopedia http://en.wikipedia.org/wiki/Quadratic_form Quadratic form From Wikipedia, the free encyclopedia In mathematics, a quadratic form is a homogeneous polynomial of degree two in a number of variables. For example, is a quadratic form in the variables x and y. Quadratic forms occupy a central place in various branches of mathematics, including number theory, linear algebra, group theory (orthogonal group), differential geometry (Riemannian metric), differential topology (intersection forms of four-manifolds), and Lie theory (the Killing form). Contents 1 Introduction 2 History 3 Real quadratic forms 4 Definitions 4.1 Quadratic spaces 4.2 Further definitions 5 Equivalence of forms 6 Geometric meaning 7 Integral quadratic forms 7.1 Historical use 7.2 Universal quadratic forms 8 See also 9 Notes 10 References 11 External links Introduction Quadratic forms are homogeneous quadratic polynomials in n variables. In the cases of one, two, and three variables they are called unary, binary, and ternary and have the following explicit form: where a,…,f are the coefficients.[1] Note that quadratic functions, such as ax2 + bx + c in the one variable case, are not quadratic forms, as they are typically not homogeneous (unless b and c are both 0). The theory of quadratic forms and methods used in their study depend in a large measure on the nature of the 1 of 8 27/03/2013 12:41 Quadratic form - Wikipedia, the free encyclopedia http://en.wikipedia.org/wiki/Quadratic_form coefficients, which may be real or complex numbers, rational numbers, or integers. In linear algebra, analytic geometry, and in the majority of applications of quadratic forms, the coefficients are real or complex numbers. -

Polynomials and Quadratics
Higher hsn .uk.net Mathematics UNIT 2 OUTCOME 1 Polynomials and Quadratics Contents Polynomials and Quadratics 64 1 Quadratics 64 2 The Discriminant 66 3 Completing the Square 67 4 Sketching Parabolas 70 5 Determining the Equation of a Parabola 72 6 Solving Quadratic Inequalities 74 7 Intersections of Lines and Parabolas 76 8 Polynomials 77 9 Synthetic Division 78 10 Finding Unknown Coefficients 82 11 Finding Intersections of Curves 84 12 Determining the Equation of a Curve 86 13 Approximating Roots 88 HSN22100 This document was produced specially for the HSN.uk.net website, and we require that any copies or derivative works attribute the work to Higher Still Notes. For more details about the copyright on these notes, please see http://creativecommons.org/licenses/by-nc-sa/2.5/scotland/ Higher Mathematics Unit 2 – Polynomials and Quadratics OUTCOME 1 Polynomials and Quadratics 1 Quadratics A quadratic has the form ax2 + bx + c where a, b, and c are any real numbers, provided a ≠ 0 . You should already be familiar with the following. The graph of a quadratic is called a parabola . There are two possible shapes: concave up (if a > 0 ) concave down (if a < 0 ) This has a minimum This has a maximum turning point turning point To find the roots (i.e. solutions) of the quadratic equation ax2 + bx + c = 0, we can use: factorisation; completing the square (see Section 3); −b ± b2 − 4 ac the quadratic formula: x = (this is not given in the exam). 2a EXAMPLES 1. Find the roots of x2 −2 x − 3 = 0 . -
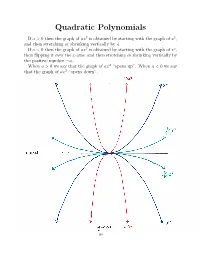
Quadratic Polynomials
Quadratic Polynomials If a>0thenthegraphofax2 is obtained by starting with the graph of x2, and then stretching or shrinking vertically by a. If a<0thenthegraphofax2 is obtained by starting with the graph of x2, then flipping it over the x-axis, and then stretching or shrinking vertically by the positive number a. When a>0wesaythatthegraphof− ax2 “opens up”. When a<0wesay that the graph of ax2 “opens down”. I Cit i-a x-ax~S ~12 *************‘s-aXiS —10.? 148 2 If a, c, d and a = 0, then the graph of a(x + c) 2 + d is obtained by If a, c, d R and a = 0, then the graph of a(x + c)2 + d is obtained by 2 R 6 2 shiftingIf a, c, the d ⇥ graphR and ofaax=⇤ 2 0,horizontally then the graph by c, and of a vertically(x + c) + byd dis. obtained (Remember by shiftingshifting the the⇥ graph graph of of axax⇤ 2 horizontallyhorizontally by by cc,, and and vertically vertically by by dd.. (Remember (Remember thatthatd>d>0meansmovingup,0meansmovingup,d<d<0meansmovingdown,0meansmovingdown,c>c>0meansmoving0meansmoving thatleft,andd>c<0meansmovingup,0meansmovingd<right0meansmovingdown,.) c>0meansmoving leftleft,and,andc<c<0meansmoving0meansmovingrightright.).) 2 If a =0,thegraphofafunctionf(x)=a(x + c) 2+ d is called a parabola. If a =0,thegraphofafunctionf(x)=a(x + c)2 + d is called a parabola. 6 2 TheIf a point=0,thegraphofafunction⇤ ( c, d) 2 is called thefvertex(x)=aof(x the+ c parabola.) + d is called a parabola. The point⇤ ( c, d) R2 is called the vertex of the parabola. -

Indivisibility of Class Numbers of Real Quadratic Fields
INDIVISIBILITY OF CLASS NUMBERS OF REAL QUADRATIC FIELDS Ken Ono To T. Ono, my father, on his seventieth birthday. Abstract. Let D denote the fundamental discriminant of a real quadratic field, and let h(D) denote its associated class number. If p is prime, then the “Cohen and Lenstra Heuris- tics” give a probability that p - h(D). If p > 3 is prime, then subject to a mild condition, we show that √ X #{0 < D < X | p h(D)} p . - log X This condition holds for each 3 < p < 5000. 1. Introduction and Statement of Results Although the literature on class numbers of quadratic fields is quite extensive, very little is known. In this paper we consider class numbers of real quadratic fields, and as an immediate consequence we obtain an estimate for the number of vanishing Iwasawa λ invariants. √Throughout D will denote the fundamental discriminant of the quadratic number field D Q( D), h(D) its class number, and χD := · the usual Kronecker character. We shall let χ0 denote the trivial character, and | · |p the usual multiplicative p-adic valuation 1 normalized so that |p|p := p . Although the “Cohen-Lenstra Heuristics” [C-L] have gone a long way towards an ex- planation of experimental observations of such class numbers, very little has been proved. For example, it is not known that there√ are infinitely many D > 0 for which h(D) = 1. The presence of non-trivial units in Q( D) have posed the main difficulty. Basically, if 1991 Mathematics Subject Classification. Primary 11R29; Secondary 11E41. Key words and phrases.