Real-Time Posix: an Overview
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Technical Standard
Technical Standard X/Open Curses, Issue 7 The Open Group ©November 2009, The Open Group All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the copyright owners. Technical Standard X/Open Curses, Issue 7 ISBN: 1-931624-83-6 Document Number: C094 Published in the U.K. by The Open Group, November 2009. This standardhas been prepared by The Open Group Base Working Group. Feedback relating to the material contained within this standardmay be submitted by using the web site at http://austingroupbugs.net with the Project field set to "Xcurses Issue 7". ii Technical Standard 2009 Contents Chapter 1 Introduction........................................................................................... 1 1.1 This Document ........................................................................................ 1 1.1.1 Relationship to Previous Issues ......................................................... 1 1.1.2 Features Introduced in Issue 7 ........................................................... 2 1.1.3 Features Withdrawn in Issue 7........................................................... 2 1.1.4 Features Introduced in Issue 4 ........................................................... 2 1.2 Conformance............................................................................................ 3 1.2.1 Base Curses Conformance ................................................................. -

Synchronizing Threads with POSIX Semaphores
3/17/2016 POSIX Semaphores Synchronizing Threads with POSIX Semaphores 1. Why semaphores? 2. Posix semaphores are easy to use sem_init sem_wait sem_post sem_getvalue sem_destroy 3. Activities 1 2 Now it is time to take a look at some code that does something a little unexpected. The program badcnt.c creates two new threads, both of which increment a global variable called cnt exactly NITER, with NITER = 1,000,000. But the program produces unexpected results. Activity 1. Create a directory called posixsem in your class Unix directory. Download in this directory the code badcnt.c and compile it using gcc badcnt.c -o badcnt -lpthread Run the executable badcnt and observe the ouput. Try it on both tanner and felix. Quite unexpected! Since cnt starts at 0, and both threads increment it NITER times, we should see cnt equal to 2*NITER at the end of the program. What happens? Threads can greatly simplify writing elegant and efficient programs. However, there are problems when multiple threads share a common address space, like the variable cnt in our earlier example. To understand what might happen, let us analyze this simple piece of code: THREAD 1 THREAD 2 a = data; b = data; a++; b--; data = a; data = b; Now if this code is executed serially (for instance, THREAD 1 first and then THREAD 2), there are no problems. However threads execute in an arbitrary order, so consider the following situation: Thread 1 Thread 2 data a = data; --- 0 a = a+1; --- 0 --- b = data; // 0 0 --- b = b + 1; 0 data = a; // 1 --- 1 --- data = b; // 1 1 So data could end up +1, 0, -1, and there is NO WAY to know which value! It is completely non- deterministic! http://www.csc.villanova.edu/~mdamian/threads/posixsem.html 1/4 3/17/2016 POSIX Semaphores The solution to this is to provide functions that will block a thread if another thread is accessing data that it is using. -

Openextensions POSIX Conformance Document
z/VM Version 7 Release 1 OpenExtensions POSIX Conformance Document IBM GC24-6298-00 Note: Before you use this information and the product it supports, read the information in “Notices” on page 73. This edition applies to version 7, release 1, modification 0 of IBM z/VM (product number 5741-A09) and to all subsequent releases and modifications until otherwise indicated in new editions. Last updated: 2018-09-12 © Copyright International Business Machines Corporation 1993, 2018. US Government Users Restricted Rights – Use, duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp. Contents List of Tables........................................................................................................ ix About This Document............................................................................................xi Intended Audience......................................................................................................................................xi Conventions Used in This Document.......................................................................................................... xi Where to Find More Information.................................................................................................................xi Links to Other Documents and Websites.............................................................................................. xi How to Send Your Comments to IBM....................................................................xiii Summary of Changes for z/VM -

Virtual Memory - Paging
Virtual memory - Paging Johan Montelius KTH 2020 1 / 32 The process code heap (.text) data stack kernel 0x00000000 0xC0000000 0xffffffff Memory layout for a 32-bit Linux process 2 / 32 Segments - a could be solution Processes in virtual space Address translation by MMU (base and bounds) Physical memory 3 / 32 one problem Physical memory External fragmentation: free areas of free space that is hard to utilize. Solution: allocate larger segments ... internal fragmentation. 4 / 32 another problem virtual space used code We’re reserving physical memory that is not used. physical memory not used? 5 / 32 Let’s try again It’s easier to handle fixed size memory blocks. Can we map a process virtual space to a set of equal size blocks? An address is interpreted as a virtual page number (VPN) and an offset. 6 / 32 Remember the segmented MMU MMU exception no virtual addr. offset yes // < within bounds index + physical address segment table 7 / 32 The paging MMU MMU exception virtual addr. offset // VPN available ? + physical address page table 8 / 32 the MMU exception exception virtual address within bounds page available Segmentation Paging linear address physical address 9 / 32 a note on the x86 architecture The x86-32 architecture supports both segmentation and paging. A virtual address is translated to a linear address using a segmentation table. The linear address is then translated to a physical address by paging. Linux and Windows do not use use segmentation to separate code, data nor stack. The x86-64 (the 64-bit version of the x86 architecture) has dropped many features for segmentation. -
![So You Think You Know C? [Pdf]](https://docslib.b-cdn.net/cover/6575/so-you-think-you-know-c-pdf-666575.webp)
So You Think You Know C? [Pdf]
So You Think You Know C? And Ten More Short Essays on Programming Languages by Oleksandr Kaleniuk Published in 2020 This is being published under the Creative Commons Zero license. I have dedicated this work to the public domain by waiving all of my rights to the work worldwide under copyright law, including all related and neighboring rights, to the extent allowed by law. You can copy, modify, distribute and perform the work, even for commercial purposes, all without asking permission. Table of Contents Introduction......................................................................................................... 4 So you think you know C?..................................................................................6 APL deserves its renaissance too.......................................................................13 Going beyond the idiomatic Python..................................................................30 Why Erlang is the only true computer language................................................39 The invisible Prolog in C++..............................................................................43 One reason you probably shouldn’t bet your whole career on JavaScript.........54 You don't have to learn assembly to read disassembly......................................57 Fortran is still a thing........................................................................................64 Learn you a Lisp in 0 minutes...........................................................................68 Blood, sweat, -
X86 Memory Protection and Translation
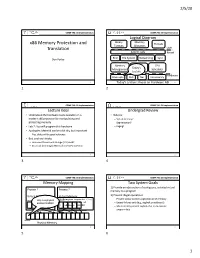
2/5/20 COMP 790: OS Implementation COMP 790: OS Implementation Logical Diagram Binary Memory x86 Memory Protection and Threads Formats Allocators Translation User System Calls Kernel Don Porter RCU File System Networking Sync Memory Device CPU Today’s Management Drivers Scheduler Lecture Hardware Interrupts Disk Net Consistency 1 Today’s Lecture: Focus on Hardware ABI 2 1 2 COMP 790: OS Implementation COMP 790: OS Implementation Lecture Goal Undergrad Review • Understand the hardware tools available on a • What is: modern x86 processor for manipulating and – Virtual memory? protecting memory – Segmentation? • Lab 2: You will program this hardware – Paging? • Apologies: Material can be a bit dry, but important – Plus, slides will be good reference • But, cool tech tricks: – How does thread-local storage (TLS) work? – An actual (and tough) Microsoft interview question 3 4 3 4 COMP 790: OS Implementation COMP 790: OS Implementation Memory Mapping Two System Goals 1) Provide an abstraction of contiguous, isolated virtual Process 1 Process 2 memory to a program Virtual Memory Virtual Memory 2) Prevent illegal operations // Program expects (*x) – Prevent access to other application or OS memory 0x1000 Only one physical 0x1000 address 0x1000!! // to always be at – Detect failures early (e.g., segfault on address 0) // address 0x1000 – More recently, prevent exploits that try to execute int *x = 0x1000; program data 0x1000 Physical Memory 5 6 5 6 1 2/5/20 COMP 790: OS Implementation COMP 790: OS Implementation Outline x86 Processor Modes • x86 -
Virtual Memory in X86
Fall 2017 :: CSE 306 Virtual Memory in x86 Nima Honarmand Fall 2017 :: CSE 306 x86 Processor Modes • Real mode – walks and talks like a really old x86 chip • State at boot • 20-bit address space, direct physical memory access • 1 MB of usable memory • No paging • No user mode; processor has only one protection level • Protected mode – Standard 32-bit x86 mode • Combination of segmentation and paging • Privilege levels (separate user and kernel) • 32-bit virtual address • 32-bit physical address • 36-bit if Physical Address Extension (PAE) feature enabled Fall 2017 :: CSE 306 x86 Processor Modes • Long mode – 64-bit mode (aka amd64, x86_64, etc.) • Very similar to 32-bit mode (protected mode), but bigger address space • 48-bit virtual address space • 52-bit physical address space • Restricted segmentation use • Even more obscure modes we won’t discuss today xv6 uses protected mode w/o PAE (i.e., 32-bit virtual and physical addresses) Fall 2017 :: CSE 306 Virt. & Phys. Addr. Spaces in x86 Processor • Both RAM hand hardware devices (disk, Core NIC, etc.) connected to system bus • Mapped to different parts of the physical Virtual Addr address space by the BIOS MMU Data • You can talk to a device by performing Physical Addr read/write operations on its physical addresses Cache • Devices are free to interpret reads/writes in any way they want (driver knows) System Interconnect (Bus) : all addrs virtual DRAM Network … Disk (Memory) Card : all addrs physical Fall 2017 :: CSE 306 Virt-to-Phys Translation in x86 0xdeadbeef Segmentation 0x0eadbeef Paging 0x6eadbeef Virtual Address Linear Address Physical Address Protected/Long mode only • Segmentation cannot be disabled! • But can be made a no-op (a.k.a. -

Software Engineering Standards Introduction
6/21/2008 Software Engineering Standards Introduction 1028 9126 730 12207 9000 CMM 15288 CMMI J-016 1679 Outline 1. Definitions 2. Sources of Standards 3. Why Use Standards ? 4. ISO and Software Engineering Standards 5. IEEE Software Engineering Collection Sources: IEEE Standards, Software Engineering, Volume Three: Product Standards, Introduction to the1999 Edition, pages i to xxiii. Horch, J., ‘Practical Guide to Software Quality management’, Artech House, 1996, chap 2. Wells, J., ‘An Introduction to IEEE/EIA 12207’, US DoD, SEPO, 1999. Moore, J., ‘Selecting Software Engineering Standards’, QAI Conference, 1998. Moore, J., ‘The Road Map to Software Engineering: A Standards-Based Guide’, Wiley-IEEE Computer Society Press, 2006. Moore, J.,’An Integrated Collection of Software Engineering Standards’, IEEE Software, Nov 1999. Gray, L., ‘Guidebook to IEEE/EIA 12207 Standard for Information Technology, Software Life Cycle Processes’, Abelia Corporation, Fairfax, Virginia, 2000. Coallier, F.; International Standardization in Software and Systems Engineering, Crosstalk, February 2003, pp. 18-22. 6/21/2008 2 1 6/21/2008 Exemple d’un système complexe Système de transport aérien Système de transport Système de Transport Aérien terrestre Système de Système de gestion du trafic réservation aérien Système Système aéroportuaire de distribution du kérosène SystèmeSystème avionique avion Système de Système de gestion de la Structure vie à bord SystèmeSystème de de équipage propulsionpropulsion Système SystèmeNavigation de de SystèmeVisualisation Système de navigationsystem de visualisation contrôle de vol SystèmeSystème de de réception réception Système de GPSGPS transport terrestremaritime 6/21/2008 3 Toward a Software Engineering Profession • What does it take ? 1. Body of Knowledge (e.g. SWEBOK) 2. -

JTC1 and SC22 - Terminology
JTC1 AD Hoc Terminology, August 2005 1 JTC1 and SC22 - Terminology Background Following my offer to collect together the definitions from SC22 standards, SC22 accepted my offer and appointed me as its terminology representative (I was later also asked to represent UK and BSI) on the JTC1 ad hoc group on terminology. These notes summarise the results of collecting the SC22 definitions, and my impressions of the JTC1 ad hoc group. Roger Scowen August 2005 A collection of definitions from SC22 standards SC22 asked me to prepare a collected terminology for SC22 containing the definitions from standards for which SC22 is responsible, and asked the project editors to send me the definitions in text form. Many, but not all, project editors did so. However there are sufficient for SC22 to judge whether to complete the list or abandon it as an interesting but unprofitable exercise. Adding definitions to the database The project editor of a standard typically sends the definitions from the standard as a Word file, but it may be plain text or in Latex or nroff format. These definitions are transformed into a uniform format by a series of global ‘find & replace’ operations to produce a Word file where each definition is represented as a row of a table with three columns: the term, its definition, and any notes and/or examples. It is often easier to check this has been accomplished by copying and pasting successive attempts into Excel than examining the Word file itself. Sometimes there are special cases such as exotic characters (for example Greek or mathematical characters), special fonts, illustrations, diagrams, or tables. -

Operating Systems
UC Santa Barbara Operating Systems Christopher Kruegel Department of Computer Science UC Santa Barbara http://www.cs.ucsb.edu/~chris/ Virtual Memory and Paging UC Santa Barbara • What if a program is too big to be loaded in memory • What if a higher degree of multiprogramming is desirable • Physical memory is split in page frames • Virtual memory is split in pages • OS (with help from the hardware) manages the mapping between pages and page frames 2 Mapping Pages to Page Frames UC Santa Barbara • Virtual memory: 64KB • Physical memory: 32KB • Page size: 4KB • Virtual memory pages: 16 • Physical memory pages: 8 3 Memory Management Unit UC Santa Barbara • Automatically performs the mapping from virtual addresses into physical addresses 4 Memory Management Unit UC Santa Barbara • Addresses are split into a page number and an offset • Page numbers are used to look up a table in the MMU with as many entries as the number of virtual pages • Each entry in the table contains a bit that states if the virtual page is actually mapped to a physical one • If it is so, the entry contains the number of physical page used • If not, a page fault is generated and the OS has to deal with it 5 Page Tables UC Santa Barbara • Page tables contain an entry for each virtual table • If virtual memory is big (e.g., 32 bit and 64 bit addresses) the table can become of unmanageable size • Solution: instead of keeping them in the MMU move them to main memory • Problem: page tables are used each time an access to memory is performed. -

Lecture 15 15.1 Paging
CMPSCI 377 Operating Systems Fall 2009 Lecture 15 Lecturer: Emery Berger Scribe: Bruno Silva,Jim Partan 15.1 Paging In recent lectures, we have been discussing virtual memory. The valid addresses in a process' virtual address space correspond to actual data or code somewhere in the system, either in physical memory or on the disk. Since physical memory is fast and is a limited resource, we use the physical memory as a cache for the disk (another way of saying this is that the physical memory is \backed by" the disk, just as the L1 cache is \backed by" the L2 cache). Just as with any cache, we need to specify our policies for when to read a page into physical memory, when to evict a page from physical memory, and when to write a page from physical memory back to the disk. 15.1.1 Reading Pages into Physical Memory For reading, most operating systems use demand paging. This means that pages are only read from the disk into physical memory when they are needed. In the page table, there is a resident status bit, which says whether or not a valid page resides in physical memory. If the MMU tries to get a physical page number for a valid page which is not resident in physical memory, it issues a pagefault to the operating system. The OS then loads that page from disk, and then returns to the MMU to finish the translation.1 In addition, many operating systems make some use of pre-fetching, which is called pre-paging when used for pages. -

File Systems: Semantics & Structure What Is a File
5/15/2017 File Systems: Semantics & Structure What is a File 11A. File Semantics • a file is a named collection of information 11B. Namespace Semantics • primary roles of file system: 11C. File Representation – to store and retrieve data – to manage the media/space where data is stored 11D. Free Space Representation • typical operations: 11E. Namespace Representation – where is the first block of this file 11L. Disk Partitioning – where is the next block of this file 11F. File System Integration – where is block 35 of this file – allocate a new block to the end of this file – free all blocks associated with this file File Systems Semantics and Structure 1 File Systems Semantics and Structure 2 Data and Metadata Sequential Byte Stream Access • File systems deal with two kinds of information int infd = open(“abc”, O_RDONLY); int outfd = open(“xyz”, O_WRONLY+O_CREATE, 0666); • Data – the contents of the file if (infd >= 0 && outfd >= 0) { – e.g. instructions of the program, words in the letter int count = read(infd, buf, sizeof buf); Metadata – Information about the file • while( count > 0 ) { e.g. how many bytes are there, when was it created – write(outfd, buf, count); sometimes called attributes – count = read(infd, inbuf, BUFSIZE); • both must be persisted and protected } – stored and connected by the file system close(infd); close(outfd); } File Systems Semantics and Structure 3 File Systems Semantics and Structure 4 Random Access Consistency Model void *readSection(int fd, struct hdr *index, int section) { struct hdr *head = &hdr[section];