Design and Implementation of Digital Signal Processing Hardware for a Software Radio Reciever
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Discrete Hilbert Transform
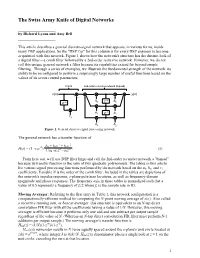
The Swiss Army Knife of Digital Networks ___________________ by Richard Lyons and Amy Bell ___________________ This article describes a general discrete-signal network that appears, in various forms, inside many DSP applications. So the "DSP Tip" for this column is for every DSP engineer to become acquainted with this network. Figure 1 shows how the network's structure has the distinct look of a digital filter—a comb filter followed by a 2nd-order recursive network. However, we do not call this unique general network a filter because its capabilities extend far beyond simple filtering. Through a series of examples, we illustrate the fundamental strength of the network: its ability to be reconfigured to perform a surprisingly large number of useful functions based on the values of its seven control parameters. Comb 2nd-order recursive network (biquad) x(n) y(n) + - -1 a0 z b z -N 0 a -1 1 z b1 c1 a b 2 2 Figure 1. General discrete-signal processing network. The general network has a transfer function of -1 -2 -N b0 + b1z + b2z H(z) = (1 -c1z ) -1 -2 . (1) 1/a0 -a1z -a2z From here out, we'll use DSP filter lingo and call the 2nd-order recursive network a "biquad" because its transfer function is the ratio of two quadratic polynomials. The tables in this article list various signal processing functions performed by the network based on the an, bn, and c1 coefficients. Variable N is the order of the comb filter. Included in the tables are depictions of the network's impulse response, z-plane pole/zero locations, as well as frequency-domain magnitude and phase responses. -
A Practical Introduction to Basic Concepts in Digital Signal Processing
A Practical introduction to basic concepts in digital signal processing An online teaching resource for Beijing Normal University Prepared and hosted by the University of Manchester United Kingdom Patrick Gaydecki [email protected] Copyright © 2015 University of Manchester 1. INTRODUCTION These tutorials are intended to teach some of the basic concepts of digital signal processing (DSP). DSP lies at the heart of many real-time digital processes, and is widely applied in audio, video, radar, sonar, communications and a host of other applications. At undergraduate and postgraduate level, DSP has traditionally been taught from an intensively theoretical perspective, with effort concentrated on the derivation or analysis of key mathematical operations and the rigorous examination of fundamental descriptors of signals, systems and methods. However DSP is far more than a mathematical framework; it is essentially a practical engineering discipline, involving mathematics, equations, algorithms, software development and hardware design. Modern DSP systems are now so powerful that they are reshaping our world at a profound level, but because humans are so adaptable, we scarcely seem to notice it. For example, although it might be argued that real-time DSP does not fundamentally alter our understanding of the physical principles underpinning the production of sound from acoustic instruments, it is also the case that in recent times, the quantitative improvement in speed of these devices has made possible the execution of tests previously considered "thought experiments". In turn, these may yet provide new and qualitatively different insights into psychoacoustic mechanisms. This is just one from a myriad examples where DSP is at the very forefront of leading edge technology and science. -

Tools and Laboratory Exercises That Reinforce DSP Concepts and Motivate Technology Students
Session 2649 Tools and Laboratory Exercises That Reinforce DSP Concepts and Motivate Technology Students Richard E. Pfile, William C. Conrad Indiana University-Purdue University at Indianapolis Abstract The goal of the DSP course in the EET department at IUPUI is to teach students how to program real-time DSP processors and to understand theoretical DSP concepts to the extent that they can comprehend literature typically seen in DSP data books and application notes. Students are taught to program a Motorola 56002 DSP processor in assembly language during the first half of the course. This helps them to understand the unique properties of DSP processors and how to use the instruction set to efficiently implement DSP algorithms. The hardware is inexpensive and provides a hands-on learning experience that particularly benefits tactile learners. Because many college age students have an interest in audio systems, the audio applications used in the laboratory also motivate students to learn. We have two hardware laboratories that are a bit different from the usual filtering and FFT exercises. In one laboratory students measure the frequency spectrum of a toy organ using a spectrum analyzer and implement the complex tone in a wave table on the hardware. This exercise helps students grasp the concept of time and frequency domains and gives students practice using circular buffers. In another laboratory, students write a simple real-time reverb program using comb filters and then use Matlab to generate an impulse time response of the system. The simple comb filter has an obvious time response that helps students understand an impulse response and provides a great starting point for introducing the z-transform. -

VLSI DESIGN of ADVANCED DIGITAL FILTERS Author
VLSI DESIGN OF ADVANCED DIGITAL FILTERS Author: Asst. Prof. Dr. Rozita Teymourzadeh, CEng. Formatted by: Kok Wai Chan FACULTY OF ENGINEERING NATIONAL UNIVERSITY OF MALAYSIA TO MY LOVELY MOTHER ABSTRACT The Cascaded Integrator Comb filters (CIC) find many applications in recent electronic devices such as frequency selection functions in a digital radio or modem and any filter structure that is required to efficiently process large sample rate factor. These filters are normally located after the sigma delta modulator and have regular structure. These types of filters do not require multipliers and the coefficient storage unlike in the normal digital FIR and IIR filters because of all filter coefficients are unity. Hence, it can be efficiently implemented to operate at high speed. Hence, this book describes the Very Large Scale Integration (VLSI) implementation of the CIC filters that are suitable for high performance audio applications. A total of five cascaded integrators and comb pairs were chosen to meet the design requirement, particularly the effect of signal aliasing to increase the performance. The CIC filter makes use of pipeline architecture that consists of fast adders. The proposed filter was designed and implemented and from FPGA implementation and Xilinx ISE synthesis result shows that the filter can perform at the maximum frequency of 189MHz, which is required for high performance audio applications. For area and power consumption, the CIC filter was optimized in ASIC under SilTerra 0.18 m and MIMOS 0.35 technologies file. -

Digital Sound Generation – Part 2
Digital Sound Generation – Part 2 Beat Frei Institute for Computer Music and Sound Technology (ICST) Zurich University of the Arts Baslerstrasse 30, CH-8048 Zürich, Switzerland [email protected] , http://www.icst.net Preface This part covers filters for sound synthesis including practical examples of oversampling, amplitude compression, and efficient parameter update schemes. Filters for equalizers and vocoders will be treated in a future part on effect design. Table of Contents 3 Main Filters ........................................................................................................................ 3 3.1 General Requirements................................................................................................ 3 3.2 Chamberlin State Variable Filter................................................................................ 4 3.3 Oversampled Chamberlin Filter............................................................................... 13 3.4 Bandlimited Saturation............................................................................................. 19 3.5 Parameter Update..................................................................................................... 20 3.5.1 Fast Exponentials ............................................................................................. 21 3.5.2 Interpolating Exponentials ............................................................................... 22 3.5.3 Stability of Time-Varying Filters.................................................................... -

The Virtual Acoustic Room
The Virtual Acoustic Room by William Grant Gardner S.B., Computer Science and Engineering Massachusetts Institute of Technology, Cambridge, Massachusetts 1982 SUBMITTED TO THE MEDIA ARTS AND SCIENCES SECTION, SCHOOL OF ARCHITECTURE AND PLANNING, IN PARTIAL FULFILLMENT OF THE REQUIREMENTS OF THE DEGREE OF MASTER OF SCIENCE AT THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY SEPTEMBER, 1992 © Massachusetts Institute of Technology 1992 All Rights Reserved Signature of the Author Media Arts and Sciences Section August 10, 1992 Certified by Barry Lloyd Vercoe, D.M.A. Professor of Media Arts and Sciences Accepted by Stephen A. Benton Chairperson Departmental Committee on Graduate Students The Virtual Acoustic Room by William Grant Gardner Submitted to the Media Arts and Sciences Section, School of Architecture and Planning, on August 10, 1992 in partial fulfillment of the requirements of the degree of Master of Science at the Massachusetts Institute of Technology Abstract A room may be used for a wide variety of performances and presentations. Each use places different acoustical requirements on the room. We desire a method of electronically controlling the acoustical properties of a room so that one physical space can accommodate various uses. A virtual acoustic room is a room equipped with speakers, microphones and signal processors that functions as an interactive room simulator. Sounds created in the room are detected by the microphones, processed to simulate a desired acoustical space, and returned to the room via the speakers. In order to ensure stable operation and enable simulation of arbitrary spaces, acoustic feedback from the speakers to the microphones must be canceled. The resulting system is a combination of acoustic feedback cancellation technology and multichannel room reverberation technology. -

Design and Implementation of a Decimation Filter for Hearing Aid Applications’’
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by ethesis@nitr Design and VLSI Implementation of a Decimation filter for Hearing Aid Applications A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Technology In VLSI DESIGN and EMBEDDED SYSTEM By SAGARA PANDU Roll No: 20507011 Department of Electronics & Communication Engineering National Institute of Technology Rourkela 2007 Design and VLSI Implementation of a Decimation filter for Hearing Aid Applications A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Technology In VLSI DESIGN and EMBEDDED SYSTEM By SAGARA PANDU Roll No: 20507011 Under the Guidance of Prof.K.K.MAHAPATRA Department of Electronics & Communication Engineering National Institute of Technology Rourkela 2007 NATIONAL INSTITUTE OF TECHNOLOGY ROURKELA CERTIFICATE This is to certify that the Thesis Report entitled “Design and VLSI Implementation of a Decimation filter for Hearing Aid Applications” submitted by Mr. Sagara Pandu (20507011) in partial fulfillment of the requirements for the award of Master of Technology degree in Electronics and Communication Engineering with specialization “VLSI Design and Embedded System” during session 2006-2007 at National Institute of Technology, Rourkela (Deemed University) and is an authentic work by him under my supervision and guidance. To the best of my knowledge, the matter embodied in the thesis has not been submitted to any other university/institute for the award of any Degree of Diploma. Date: Prof. K.K. Mahapatra Dept. of Electronics & Communication Engg. National Institute of Technology Rourkela-769008 ACKNOWLEDGEMENTS First of all, I would like to express my deep sense of respect and gratitude towards my advisor and guide Prof. -

Filter Design: Analysis and Review
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Directory of Open Access Journals Anirudh Singh Int. Journal of Engineering Research and Applications www.ijera.com ISSN : 2248-9622, Vol. 4, Issue 1( Version 3), January 2014, pp.236-259 RESEARCH ARTICLE OPEN ACCESS Filter Design: Analysis and Review Anirudh Singhal Thapar University, Patiala (Punjab), India Abstract This paper represents the review analysis of various types of filters design. In this paper we discuss the designing of filters. For discussing the designing of filters we consider the some standard paper which is based on filter design. First we will discuss about filter then we will discuss about types of filter and give the review on different ways of designing of filter. Butterworth Filter I. Introduction A filter is generally a frequency-selective Chebyshev Filter device. Some frequencies are passed through the Eliptical Filter filter and some frequencies are blocked by filter. The Linkwitz-Riley Filter frequencies of signals that are pass through the filter Eletronic Filter are called pass band frequencies and those Biquad Filter frequencies that are stop by the filter are call stop Notch Filter band frequencies. For pass band frequencies, the Comb Filter system function magnitude is very large and ideally Infinite and Finite Impulse Response Filter is a constant while for a stop band frequencies, the (IIR and FIR) system function magnitude is very small and ideally High Pass and Low pass Filter (HPF and is zero. The filter is also work as a remove the noise LPF) component from the signal and passes the remaining Bessel Filter signal. -

Specimen Question Papers
Specimen Question Papers: Important Note: The questions in these papers are meant to illustrate the general format, style, distribution, weight, degree of difficulty, time factor etc. (as there are no papers from previous years to refer to.) Students are advised to prepare for ALL topics covered in the class, and not to neglect those topics which may not have been included in the following papers. This section carries 50 marks and is meant to be completed in 1½ hours. Paper I Q1 a) Discuss the classification of sequences, giving one example of each type (8) b) Comment with proof on the linearity, causality, stability and time invariance of the system y[n] = nx[n] (8) or Q1 a) Explain the relationship between single and double pole locations in the z-plane and the impulse response. (8) b) If g[n] is an even sequence and h[n] is an odd sequence state with proof which of the following is odd and which is even 1) v[n] = h[n]h[n] 2) x[n] = g[n]h[n] (8) Q2 a) Explain the differences between FIR and IIR Filters and mention their advantages and disadvantages. (8) b) A FIR LPF is required with specifications pass-band edge frequency = 1.5 kHz transition width =0.5 kHz, and f c is centred on the transition band. Stop-band attenuation >50 dB sampling frequency = 8 kHz Select a suitable window and find N. .If the window is w(n) = 0.54 + 0.46 Cos(2 π n/N) find filter impulse response coefficients h ( −2) and h (2) (8) or Q2 a) How will you perform the geometric evaluation of the frequency response of a LTI system? (8) b) What are window functions? How are they useful? Give the properties of the Hamming window.(8) Q3 Any Three: (18) a) Notch and comb filters b) Sampling c) Concept of pipelining in DSP processors d) TMC320C25 processor architecture.